技术特征:
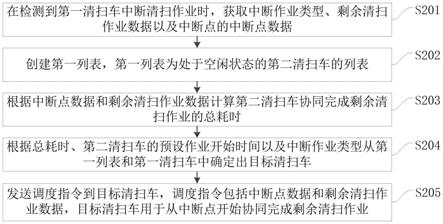
1.一种清扫车协同作业方法,其特征在于,包括:在检测到第一清扫车中断清扫作业时,获取中断作业类型、剩余清扫作业数据以及中断点的中断点数据;创建第一列表,所述第一列表为处于空闲状态的第二清扫车的列表;根据所述中断点数据和所述剩余清扫作业数据计算所述第二清扫车协同完成剩余清扫作业的总耗时;根据所述总耗时、所述第二清扫车的预设作业开始时间以及所述中断作业类型从所述第一列表和所述第一清扫车中确定目标清扫车;发送调度指令到目标清扫车,所述调度指令包括所述中断点数据和所述剩余清扫作业数据,所述目标清扫车用于从所述中断点开始协同完成所述剩余清扫作业。2.根据权利要求1所述的方法,其特征在于,所述创建第一列表,包括:获取所述中断点预设范围内的清扫车当前的工作状态;将所述工作状态为空闲状态的清扫车作为第二清扫车,并将所述第二清扫车的id添加到第一列表中。3.根据权利要求1所述的方法,其特征在于,所述中断点数据包括所述中断点的坐标,所述根据所述中断点数据和所述剩余清扫作业数据计算所述第二清扫车协同完成剩余清扫作业的总耗时,包括:针对所述第一列表中的每辆所述第二清扫车,获取所述第二清扫车的当前坐标;采用所述当前坐标和所述中断点的坐标计算所述第二清扫车前往所述中断点的第一耗时;根据所述剩余作业数据计算所述第二清扫车从所述中断点完成剩余清扫作业的第二耗时;计算所述第一耗时和所述第二耗时的和值得到所述第二清扫车协同完成所述剩余清扫作业的总耗时。4.根据权利要求3所述的方法,其特征在于,所述中断作业类型包括第一类型,所述第一类型为解除中断的时间可预估的中断,在根据所述剩余作业数据计算所述第二清扫车从所述中断点完成剩余清扫作业的第二耗时之前,还包括:在所述中断作业类型为第一类型时,计算所述第一清扫车解除中断并返回中断点的第三耗时;判断所述第一耗时是否大于所述第三耗时;若是,从所述第一列表中筛除所述第二清扫车,得到更新后的第一列表。5.根据权利要求1所述的方法,其特征在于,所述根据所述总耗时、所述第二清扫车的预设作业开始时间以及所述中断作业类型从所述第一列表和所述第一清扫车中确定目标清扫车,包括:针对所述第一列表中的每辆所述第二清扫车,采用当前时间和所述总耗时计算所述第二清扫车协同完成所述清扫作业的时间段;从所述第一列表删除预设作业开始时间在所述时间段内的第二清扫车得到第二列表,并将删除的第二清扫车添加到预设的备选列表中;判断所述第二列表是否为空;
若是,根据所述中断作业类型从所述备选列表和所述第一清扫车中确定目标清扫车;若否,从所述第二列表中选取一辆第二清扫车作为目标清扫车。6.根据权利要求5所述的方法,其特征在于,所述根据所述中断作业类型从所述备选列表和所述第一清扫车中确定目标清扫车,包括:获取所述第一清扫车中断清扫作业的中断作业类型,所述中断作业类型包括第一类型和第二类型,所述第一类型为解除中断的时间可预估的中断,所述第二类型为解除中断的时间不可预估的中断;判断所述中断作业类型是否为第一类型;若是,确定所述第一清扫车为目标清扫车;若否,从所述备选列表中选取一辆第二清扫车作为目标清扫车。7.根据权利要求5所述的方法,其特征在于,所述从第二列表中选取一辆第二清扫车作为目标清扫车,包括:从第二列表中选取一辆所述总耗时最小的第二清扫车作为目标清扫车。8.一种清扫车协同作业方法,其特征在于,包括:在第一清扫车检测到中断清扫作业时,获取中断作业类型、剩余清扫作业数据以及中断点的中断点数据;将所述中断作业类型、所述剩余清扫作业数据和所述中断点数据发送到调度服务器,所述调度服务器用于创建第一列表,所述第一列表为处于空闲状态的第二清扫车的列表;根据所述中断点数据和所述剩余清扫作业数据计算所述第二清扫车协同完成剩余清扫作业的总耗时;根据所述总耗时、所述第二清扫车的预设作业开始时间以及所述中断作业类型从所述第一列表和所述第一清扫车中确定目标清扫车;发送调度指令到所述目标清扫车。9.根据权利要求8所述的方法,其特征在于,在所述将所述中断作业类型、所述剩余清扫作业数据和所述中断点数据发送到调度服务器之前,还包括:检测与所述调度服务器的通信状态;在所述通信状态为断开状态时,创建第一列表,所述第一列表为处于空闲状态的第二清扫车的列表;根据所述中断点数据和所述剩余清扫作业数据计算所述第二清扫车协同完成所述剩余清扫作业的总耗时;根据所述总耗时、所述第二清扫车的预设作业开始时间和所述中断作业类型从所述第一列表和所述第一清扫车中确定目标清扫车;发送调度指令到目标清扫车,所述调度指令包括所述中断点数据和所述剩余清扫作业数据,所述目标清扫车用于从所述中断点开始协同完成所述剩余清扫作业。10.根据权利要求8所述的方法,其特征在于,所述获取所述中断点的中断点数据,包括:通过至少一种定位传感器获取所述中断点的坐标;通过激光雷达在所述中断点采集点云数据作为校验点云数据;通过图像采集装置在所述中断点采集图像数据作为校验图像数据;将所述坐标、所述校验点云数据和所述校验图像数据打包为中断点的中断点数据。
11.根据权利要求8所述的方法,其特征在于,还包括:当所述第一清扫车处于空闲状态并接收到所述调度服务器或其他清扫车发送的调度指令时,获取所述调度指令中的所述中断点数据和所述剩余清扫作业数据;根据所述中断点数据定位所述中断点;根据所述剩余清扫作业数据从所述中断点开始协同完成所述剩余清扫作业。12.根据权利要求11所述的方法,其特征在于,所述中断点数据包括坐标、校验点云数据和校验图像数据,所述根据所述中断点数据定位所述中断点,包括:行驶至所述坐标对应的位置;在当前位置采集点云数据和图像数据;通过所述校验点云数据、所述校验图像数据、采集到的所述点云数据以及所述图像数据计算位置误差;判断所述位置误差是否在预设的误差范围内;若是,确定所述当前位置为所述中断点;若否,控制所述第一清扫车在当前位置预设范围内行驶,并返回执行在所述当前位置采集点云数据和图像数据的步骤。13.一种清扫车协同作业装置,其特征在于,包括:中断数据获取模块,用于在检测到第一清扫车中断清扫作业时,获取中断作业类型、剩余清扫作业数据以及中断点的中断点数据;第一列表获取模块,用于创建第一列表,所述第一列表为处于空闲状态的第二清扫车的列表;总耗时计算模块,用于根据所述中断点数据和所述剩余清扫作业数据计算所述第二清扫车协同完成所述剩余清扫作业的总耗时;目标清扫车确定模块,用于根据所述总耗时、所述第二清扫车的预设作业开始时间以及所述中断作业类型从所述第一列表和所述第一清扫车中确定目标清扫车;调度指令发送模块,用于发送调度指令到目标清扫车,所述调度指令包括所述中断点数据和所述剩余清扫作业数据,所述目标清扫车用于从所述中断点开始协同完成所述剩余清扫作业。14.一种清扫车协同作业装置,其特征在于,包括:中断数据采集模块,用于在第一清扫车检测到中断清扫作业时,获取中断作业类型、剩余清扫作业数据以及中断点的中断点数据;中断数据发送模块,用于将所述中断作业类型、所述剩余清扫作业数据和所述中断点数据发送到调度服务器,所述调度服务器用于创建第一列表,所述第一列表为处于空闲状态的第二清扫车的列表;根据所述中断点数据和所述剩余清扫作业数据计算所述第二清扫车协同完成剩余清扫作业的总耗时;根据所述总耗时、所述第二清扫车的预设作业开始时间以及所述中断作业类型从所述第一列表和所述第一清扫车中确定目标清扫车;发送调度指令到目标清扫车。15.一种清扫车调度系统,其特征在于,包括调度服务器和清扫车,所述调度服务器配置为执行权利要求1-7中任一项所述的清扫车协同作业方法,所述清扫车配置为执行权利要求8-12中任一项所述的清扫车协同作业方法。
16.一种电子设备,其特征在于,所述电子设备包括:一个或多个处理器;存储器,用于存储一个或多个计算机程序,当所述一个或多个计算机程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-12中任一项所述的清扫车协同作业方法。17.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如权利要求1-12中任一项所述的清扫车协同作业方法。
技术总结
本发明实施例提供了一种清扫车协同作业方法、装置、系统、电子设备和存储介质,该方法包括:在检测到第一清扫车中断清扫作业时,创建处于空闲状态的第二清扫车的第一列表、中断清扫作业的中断作业类型、剩余清扫作业数据以及中断点的中断点数据,根据中断点数据和剩余清扫作业数据计算第二清扫车协同完成剩余清扫作业的总耗时,根据总耗时、第二清扫车的预设作业开始时间以及中断作业类型从第一列表和第一清扫车中确定目标清扫车,以调度目标清扫车协同完成剩余清扫作业,可以将空闲的、与自身清扫作业的预设作业时间无冲突的第二清扫车作为目标清扫车,避免第一清扫车长时间中断作业而延误清扫作业无法,提高了清扫作业效率和清扫车的利用效率。率和清扫车的利用效率。率和清扫车的利用效率。
技术研发人员:李浩
受保护的技术使用者:广州赛特智能科技有限公司
技术研发日:2021.12.28
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。