1.本发明涉及五轴点胶机的机械标定技术领域,具体地说,是一种基于工业相机的五轴点胶机的误差标定方法,用于标定五轴的机械几何结构参数,计算五轴机器的各项误差,提高五轴机器加工精度,也可推广应用于五轴数控机床加工以及其它精密仪器加工的五轴设备之上。
背景技术:
2.五轴机器相较于传统三轴机器,具有加工精度更高、加工效率更高、能加工结构更复杂的工件等特点,在市场上更具竞争优势。同时也因两个旋转轴的增加,五轴机器的机械结构变得更为复杂,加之机器机械结构自身存在的几何误差,机器运行时带来的磨损等,这些因素对于标定五轴机器几何结构参数提出了需求。
3.常用的现有技术多为平动轴检测技术、转动轴检测技术和误差补偿技术:平动轴检测多采用激光干涉仪、千分表等测量仪器检测三个平动轴的几何精度以及平动轴之间的垂直度;在转动轴检测技术中,市面上五轴机器主要分为双转台结构、单摆台-单转台结构、双摆头结构三种,根据不同的机械结构建立相对应的几何数学模型,通过水平仪、球杆仪等仪器测量旋转轴的径向、轴向、切向的轴线偏差,计算旋转轴的偏心率等数据;在误差补偿技术中,根据误差数据进行误差补偿,以达到提高加工精度的目的。
4.市面上五轴机械设备的结构不同,现有测量工具的使用受特定的机械结构约束,适用性不强,现有五轴标定技术标定流程过于繁琐、所需时间更多、效率更低。因其流程繁琐,所以对于实施标定的技术人员技术要求较高。标定所需球杆仪、激光干涉仪等测量仪器相较于本发明使用到的工业相机更加昂贵,在实际应用中会增加厂家的使用成本,总而言之,这些传统方案存在标定流程繁琐,执行效率不高,测量仪器价格昂贵等缺点。
5.因此,本发明提出了一种技术方案,能够解决上述问题,不同于通过激光干涉仪、千分表、球杆仪等测量仪器来对五轴机器进行标定处理,本技术方案仅需要工业相机和设计的标定方法就能够完成数据的采集和标定运算,在极大简化标定流程的同时减少了标定的使用成本。
技术实现要素:
6.本发明的目的在于提供一种基于工业相机的五轴点胶机的误差标定方法,仅需要工业相机和设计的标定方法就能够完成数据的采集和标定运算,在极大简化标定流程的同时减少了标定的使用成本。
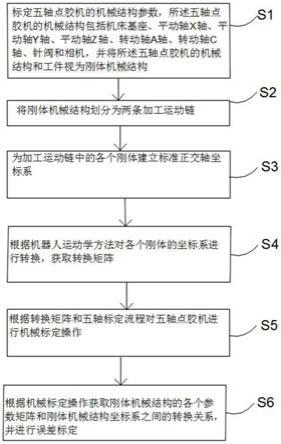
7.本发明通过下述技术方案实现:一种基于工业相机的五轴点胶机的误差标定方法,包括以下步骤:
8.步骤s1.确定五轴点胶机的机械结构,所述五轴点胶机的机械结构包括机床基座、平动轴x轴、平动轴y轴、平动轴z轴、转动轴a轴、转动轴c轴、胶阀和相机,并将所述五轴点胶机的机械结构和工件视为刚体机械结构;
9.步骤s2.将刚体机械结构划分为两条加工运动链;
10.步骤s3.为加工运动链中的各个刚体建立标准正交轴坐标系;
11.步骤s4.根据机器人运动学方法对各个刚体的坐标系建立转换矩阵和转换关系;
12.步骤s5.根据转换矩阵和五轴标定流程对五轴点胶机进行机械标定操作,获取标定计算所需数据;
13.步骤s6.根据机械标定操作获取的数据进行误差标定计算,获取刚体机械结构的各个参数矩阵和刚体机械结构坐标系之间的转换关系,并进行误差分析。
14.在本技术方案中,为了解决标定流程复杂,执行效率低,以及所需测量仪器较贵等缺点。本发明结合计算机视觉、五轴点胶机机械结构,实现对机械结构的参数标定功能。所需测量工具仅需工业相机、标定板。标定成本极大降低。标定过程只需操作人员对标定板进行简单采图工作,极大简化了标定流程。本技术方案所提出的关键技术在于将工业相机串联至双转台式五轴机床运动链中,采用坐标系的刚体变换(齐次坐标变换)方法建立包含相机坐标系、z轴、x轴、y轴、a轴、c轴和世界坐标系(加工坐标系)的串联运动学模型,利用该模型约束获取工件空间点在像素坐标系和世界坐标系中的转换关系,而该转换关系耦合了由于运动轴安装所带来的机床位置无关误差因素(pige),通过该模型求解的工件空间点坐标和位姿可消除机床位置无关误差,提高加工精度。
15.为了更好地实现本发明,进一步地,步骤s2中的两条加工运动链包括:
16.一条加工运动链包括平动轴x轴、平动轴z轴胶阀和相机;
17.另一条加工运动链包括平动轴y轴、转动轴a轴、转动轴c轴和工件;
18.通过相机和胶阀对工件进行点胶加工。
19.为了更好地实现本发明,进一步地,步骤s3包括:
20.建立机床基座坐标系{m},作为所有坐标系位姿的参考坐标系,坐标原点位于机械原点;
21.建立平动轴x轴的坐标系{x},坐标x轴与实际x平动轴平行,机床复位时坐标原点与坐标系{m}重合;
22.建立平动轴y轴的坐标系{y},机床复位时坐标和坐标系{w}重合;
23.建立平动轴z轴的坐标系{z},坐标z轴与实际z平动轴平行,机床复位时坐标原点与坐标系{m}重合;
24.建立转动轴a轴的坐标系{a},各轴向与坐标系{w}平行,机床复位时坐标原点位于a轴上;
25.建立转动轴c轴的坐标系{c},各轴向与坐标系{w}平行,机床复位时坐标原点位于c轴上;
26.建立胶阀和相机坐标系{v},胶阀由相机表示,坐标原点在相机光心处,坐标z轴与相机光轴方向重合,并建立像素坐标系{e};
27.建立工件坐标系{w},在标定时,标定板与工作台之间不存在相对位移,设定工件坐标系与标定板坐标系相同,将工件坐标系与标定板坐标系定义为工件坐标系。
28.为了更好地实现本发明,进一步地,步骤s4包括:
29.通过刚体运动变换方法中定义的旋转矩阵r和平移向量t描述上述坐标系间旋转过程和平移过程;
30.定义符号r
xy
表示由{y}坐标系向{x}坐标系转换的旋转矩阵、t
xy
表示由{y}坐标系向{x}坐标系转换的平移向量;同理,可定义符号r
vz
、t
vz
、r
zx
、t
zx
、r
ya
、t
ya
、r
ac
、t
ac
、r
cw
、t
cw
来表示对应的旋转矩阵和平移向量。
31.其中:
32.r
vz
表示由{z}坐标系向{v}坐标系转换的旋转矩阵;
33.t
vz
表示由{z}坐标系向{v}坐标系转换的平移向量;
34.r
zz
表示由{x}坐标系向{z}坐标系转换的旋转矩阵;
35.t
zx
表示由{x}坐标系向{z}坐标系转换的平移向量;
36.r
ya
表示由{a}坐标系向{y}坐标系转换的旋转矩阵;
37.r
ya
表示由{a}坐标系向{y}坐标系转换的平移向量;
38.r
ac
表示由{c}坐标系向{a}坐标系转换的旋转矩阵;
39.t
ac
表示由{c}坐标系向{a}坐标系转换的平移向量;
40.r
cw
表示由{w}坐标系向{c}坐标系转换的旋转矩阵;
41.t
cw
表示由{w}坐标系向{c}坐标系转换的平移向量;
42.通过上述坐标系的定义结合五轴点胶机的运动链关系可知,对于任意的点胶机机械坐标[x,y,z,a,c],有以下函数映射关系:t
zx
=f(z)、t
xy
=f(x)、t
ya
=f(y)、r
ac
=f(a)、r
cw
=f(c)。
[0043]
即上述转换矩阵\向量中,t
vz
、t
xy
、t
ya
、r
ac
、r
cw
的数值与点胶机机械坐标相关;而r
vz
、r
zx
、t
zx
、r
xy
、r
ya
、t
ac
、t
cw
的数值与点胶机的几何结构参数相关,是固定值。
[0044]
根据上述结论,可以建立起工件坐标系到相机坐标系下的转换关系如下:
[0045][0046]
上式中,分别表示空间点在相机坐标系和工件坐标下的齐次坐标,其他符号意义同前。
[0047]
对公式(1)中的几何结构误差参数进行耦合处理,可以将公式(1)转化成如下公式:
[0048][0049]
上式中,r
va
表示{a}坐标系到相机坐标系的旋转矩阵;r(a)表示由于转动轴a转动产生的旋转矩阵;r(c)表示由于转动轴c转动产生的旋转矩阵;v
vm
可以表示为h
vm
=[v
x
,vy,vz],其中v
x
、vy、vz分别表示平动轴x、y、z在相机坐标系下的轴向向量;t
vm
为机械复位时,工件坐标系和相机坐标系原点的偏移向量;列向量[x y z 1]
t
表示由机械平动轴x、y、z坐标值构成的齐次坐标(上标
t
为向量或矩阵的转置表示);r
ac
、t
ac
、r
cw
、t
cw
、意义同前。
[0050]
通过公式(2),即可通过任意的机械坐标计算工件坐标系和相机坐标系间的转换关系,同时也可根据工件在工件坐标系和相机坐标系下的坐标值反求出对应的机械坐标,从而实现五轴联动点胶加工;同时也可以通过对公式(2)进行解耦分析,得到五轴点胶机的几何结构误差参数值,从而实现误差补偿,提高五轴点胶精度。因此,公式(2)中的各个旋转矩阵及偏移向量的参数值,即为本标定方法的核心求解目标。
[0051]
为了对公式(2)进行标定求解,需要对公式(2)进行进一步分析,当点胶机转动轴a、c保持复位状态时,有:
[0052][0053]
公式(3)中,r
vw
表示转动轴a、c保持复位状态时工件坐标系与相机坐标系间的旋转矩阵,由于转动轴保持复位状态,因此r
vw
是固定的参数矩阵,其他参数。
[0054]
当点胶机只转动转动轴a时,有:
[0055][0056]
上式中,ra和ta表示将转动轴a转回复位零点,对工件坐标系产生的旋转矩阵和偏移向量;获取其他符号意义同前。
[0057]
因此可以通过单独转动任意某一转动轴,通过公式(4),求出任意转动轴在工件坐标系下的回转轴线。
[0058]
为了更好地实现本发明,进一步地,步骤s5中的五轴标定流程包括:
[0059]
步骤s5.1.对五轴点胶机的刚体机械结构和标定板进行调整;
[0060]
步骤s5.2.使用五轴点胶机进行采集图片;
[0061]
步骤s5.3.根据采集到的图片,通过相机标定算法,获取相机内置参数矩阵k、每个拍照位姿下外参旋转矩阵ri、外参平移向量ti和标定板上点的像素坐标;
[0062]
步骤s5.4.进行机械标定求解运算,所述机械标定求解运算包括求解初始解运算的方法a和迭代优化获取最优解运算的方法b;
[0063]
步骤s5.5.通过上述步骤求解出各个刚体机械结构的相关参数矩阵,
[0064]
步骤s5.6.获取刚体机械结构的相关参数。
[0065]
为了更好地实现本发明,进一步地,步骤s5.1包括:
[0066]
步骤s5.1.1.将标定板固定在工作台上;
[0067]
步骤s5.1.2.设置在转动轴a轴和转动轴c轴轴初始状态,即转动轴a轴和转动轴c轴都处于0度时,令标定板与机床基座平面平行;
[0068]
步骤s5.1.3.将相机和胶阀固定在平动轴z轴上,令相机与平动轴z轴处于平行状态,并垂直于机床基座平面。
[0069]
为了更好地实现本发明,进一步地,步骤s5.2包括:
[0070]
步骤s5.2.1.在平动轴y轴、平动轴z轴、转动轴a轴和转动轴c轴不运动情况下,多次移动平动轴x轴,采集仅平移平动轴x轴的n组图片;
[0071]
步骤s5.2.2.根据步骤s5.2.1的方式采集仅平移y轴的n组图片和仅平移z轴的n组图片,获取仅移动平动轴下采集的3n张图片;
[0072]
步骤s5.2.3.采集在转动轴a轴等角度θ转动下的m张图片、转动轴c轴等角度α转动下的m张图片;
[0073]
步骤s5.2.4.在采图的同时记录并采集每张图片时的机械坐标pm。
[0074]
为了更好地实现本发明,进一步地,步骤s5.4中求解初始解运算的方法a包括:
[0075]
步骤a1.获取仅移动平动轴下采集的3n张图片对应的3n组旋转矩阵并取均值,然后进行满足旋转矩阵约束条件的奇异值分解,得到公式(3)中r
vw
的初始解;
[0076]
步骤a2.根据胶阀和相机坐标系{v}与工件坐标系{w}的运动学关系和相机成像关系,即分别通过公式(3)以及对应的拍照位姿下的外参旋转矩阵ri、外参平移向量ti,建立3n个关于未知数h
vm
、t
vm
的线性方程,求出公式(3)中h
vm
、t
vm
的初始解;
[0077]
步骤a3预设转动轴a轴在转动轴工件坐标系{w}下的方向向量为va=[k
x
,ky,kz]
t
,转动轴a轴上有点pa;根据在转动轴a轴等角度θ转动下的m张图片对应拍照位姿的外参旋转矩阵ri、外参平移向量ti,结合公式(4)可以建立m个关于未知数ra、ta方程,并计算获取转动轴a轴在工件坐标系下的轴向量va和轴上的点ta;
[0078]
步骤a4.预设转动轴c轴在转动轴c轴的坐标系{c}下的方向向量,根据步骤a3的方式,同理可以获取转动轴c轴在工件坐标系下的轴向量vc和轴上的点tc;
[0079]
为了更好地实现本发明,进一步地,9.步骤s5.4中迭代优化运算获取最优解的方法b包括:
[0080]
步骤b1根据公式(2)建立起工件坐标系{w}到胶阀和相机坐标系{v}间的变换关系;
[0081]
步骤b2.根据步骤s5.3,获取胶阀和相机坐标系{v}到像素坐标系{e}的变换关系;
[0082]
步骤b3.根据工件坐标系{w}和胶阀和相机坐标系{v}的变换关系和胶阀和相机坐标系{v}到像素坐标系{e}的变换关系计算标定板上特征点的理论像素坐标;
[0083]
步骤b4.根据标定板上的点在像素坐标系{e}下的理论值和测量值之差的模的和最小建立优化目标函数;
[0084]
步骤b5.根据公式(2)、(3)、(4),根据h
vm
、t
vm
、va、ta、vc、tc设定r
va
、r
ac
、t
ac
、r
cw
、t
cw
、h
vm
、t
vm
、r(a)、r(c)的初始值;
[0085]
步骤b6.预设目标函数雅克比矩阵;
[0086]
步骤b7.根据l-m算法对优化函数进行求解,获取r
va
、r
ac
、t
ac
、r
cw
、t
cw
、h
vm
、t
vm
的最优解。
[0087]
为了更好地实现本发明,进一步地,步骤s6包括:
[0088]
步骤s6.1.将h
vm
按列拆分得到平动轴x轴、平动轴y轴和平动轴z轴在胶阀和相机坐标系{v}下的轴向量,并进行单位化后记为v
x
、vy和vz;
[0089]
步骤s6.2.将旋转矩阵r(a)、r(c)对应的旋转轴向量,通过坐标系间的转换关系得到转动轴a轴和转动轴c轴在胶阀和相机坐标系{v}下的轴单位向量va和vc;
[0090]
步骤s6.3.根据夹角计算公式对单位向量v
x
和vy进行计算,获取平动轴x轴和平动轴y轴的夹角,并可以获取其他任意两轴之间的夹角;
[0091]
步骤s6.4.根据r
va
、r
ac
、t
ac
、r
cw
、t
cw
、h
vm
、t
vm
的最优解,设置工件坐标系{w}和胶阀和相机坐标系{v}的变换关系中的各个参数矩阵,建立工件坐标系{w}、胶阀和相机坐标系{v}和机床基座坐标系{m}三者的转换关系并进行后续的误差补偿。
[0092]
本发明与现有技术相比,具有以下优点及有益效果:
[0093]
(1)本发明结合计算机视觉、五轴点胶机机械结构,实现对机械结构的参数标定功能。所需测量工具仅需工业相机、标定板。标定成本极大降低。标定过程只需操作人员对标定板进行简单采图工作,极大简化了标定流程;
[0094]
(2)本发明用于实现精确五轴联动控制,根据五轴点胶机机械结构,确立加工链,构建加工链中各刚体坐标系之间转换的数学模型;
[0095]
(3)本发明利用视觉技术,对相机与标定板间的位姿进行计算,结合运动学模型计算出初始解,本发明建立起优化函数,对初始解进行迭代优化;
[0096]
(4)本发明对五轴点胶机的具体的机械结构没有要求,描述了一种具有普适性的算法原理,可以应用任何五轴点胶机的控制系统中。
附图说明
[0097]
本发明结合下面附图和实施例做进一步说明,本发明所有构思创新应视为所公开内容和本发明保护范围。
[0098]
图1为本发明所提供的一种基于工业相机的五轴点胶机的误差标定方法的流程图。
[0099]
图2为本发明所提供的一种基于工业相机的五轴点胶机的误差标定方法中加工运动链示意图;
[0100]
图3为本发明所提供的一种基于工业相机的五轴点胶机的误差标定方法中主要刚体的坐标系示意图;
[0101]
图4为本发明所提供的一种基于工业相机的五轴点胶机的误差标定方法中机械标定操作的流程图。
具体实施方式
[0102]
为了更清楚地说明本发明实施例的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,应当理解,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例,因此不应被看作是对保护范围的限定。基于本发明中的实施例,本领域普通技术工作人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0103]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;也可以是直接相连,也可以是通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0104]
实施例1:
[0105]
本实施例的一种基于工业相机的五轴点胶机的误差标定方法,如图1所示,在本实施例中机械标定目的是为了标定五轴点胶机机械几何结构参数,计算五轴设备存在的各项误差数据、建立起工件坐标系、相机坐标系、机床坐标系三者的转换矩阵。如图2所示,五轴点胶机主要由机床基座、三个平动轴(x轴、y轴、z轴)、两个转动轴(a轴、c轴)组成。通过机床基座与各轴之间的链接,轴与轴之间的衔接,形成加工运动链,实现五轴联动。运动过程中,基于机器人运动学思想,将五轴点胶机的机床基座、运动轴、胶阀、工件、相机均视为刚体,从而将上述刚体机械结构划分为两条加工运动链,给加工运动链中的各个刚体建立坐标系,根据图2中的机械结构,建立如图2主要刚体的坐标系,建立的所有坐标系都为标准正交轴坐标系。
[0106]
实施例2:
[0107]
本实施例在实施例1的基础上做进一步优化,。
[0108]
本实施例的其他部分与实施例1相同,故不再赘述。
[0109]
实施例3:
[0110]
本实施例在实施例1的基础上做进一步优化,如图3所示,机床基座坐标系{m},可作为所有坐标系位姿的参考坐标系,坐标原点位于机械原点;工件坐标系{w},在标定时,标定板与工作台之间不存在相对位移,认为工件坐标系与标定板坐标系相同,下文将二者统称为工件坐标系;x轴的坐标系{x},坐标x轴与实际x平动轴平行,原点与{m}重合;y轴的坐标系{y},当a轴和c轴未发生旋转时和{w}重合;z轴的坐标系{z},坐标z轴与实际z平动轴平行,原点与{m}重合;a轴的坐标系{a},各轴向与{w}平行,原点位于a轴上一点;c轴的坐标系{c},各轴向与{w}平行,原点位于c轴上一点;相机坐标系{v}(针头由相机表示),坐标原点在光心处,坐标z轴与相机光轴方向重合。
[0111]
本实施例的其他部分与实施例1相同,故不再赘述。
[0112]
实施例4:
[0113]
本实施例在实施例1的基础上做进一步优化,在机器人运动学中认为,任意两个坐标系之间可通过旋转加上平移使两个坐标系重合。实际运用中,通过旋转矩阵r描述旋转过程,平移向量t描述平移过程;同样的,在相机成像模型中,通过外参旋转矩阵r和平移向量t可以将空间点从世界坐标系变换至相机坐标系下;即有pa=r
·
pb t
ꢀꢀ
(5)(上式中pa、pb分别表示空间点在坐标系a和坐标系b上的坐标值,r表示旋转矩阵,t表示平移向量。)二者均可通过公式(5)完成空间点在坐标系a和坐标系b间的坐标值的转换;
[0114]
本实施例的其他部分与实施例1相同,故不再赘述。
[0115]
实施例5:
[0116]
本实施例在实施例1的基础上做进一步优化,如图4所示,在公式(2)、公式(3)、公式(4)的基础上,可以进行机械标定操作,对五轴点胶机的刚体机械结构和标定板进行调整使得标定板能在相机画面里清晰成像后使用五轴点胶机进行采集图片,根据采集图片,通过相机标定算法,获得相机内置参数矩阵k,外参旋转矩阵r,外参平移向量t和标定板上点的像素坐标(u,v),进行机械标定求解运算,该过程包含初始解运算的方法a和迭代优化获取最优解运算的方法b,获取刚体机械结构的相关参数,最后通过上述步骤求解出各个刚体机械结构的相关参数矩阵,即计算五轴设备存在的各项误差数据、建立起工件坐标系、相机坐标系、机床坐标系三者的转换矩阵。
[0117]
本实施例的其他部分与实施例1相同,故不再赘述。
[0118]
实施例6:
[0119]
本实施例在实施例1的基础上做进一步优化,在本实施例中,在整个五轴标定流程中,五轴标定所需的测量工具是标定板和相机,对五轴点胶机的刚体机械结构和标定板进行调整包括对测量工具进行安装,且安装要求是:将标定板固定在工作台上,要求在a、c轴初始状态下(默认为a、c轴都在0度时),标定板与机床基座平面平行,相机(胶阀)固定在z轴上,相机与z轴处于平行状态,垂直于机床基座平面,调整相机高度、相机光圈、焦距,使得标定板能在相机画面里清晰成像后使用五轴点胶机进行采集图片。
[0120]
本实施例的其他部分与实施例1相同,故不再赘述。
[0121]
实施例7:
[0122]
本实施例在实施例1的基础上做进一步优化,本实施例使用五轴点胶机进行采集图片,首先在y轴、z轴、a轴、c轴不运动情况下,多次移动x轴,采集n组图片,也用这种方式采集仅平移y轴的n组图片、仅平移z轴的n组图片;再集在a轴等角度θ转动下的m张图片、c轴等角度α转动下的m张图片;然后在采图同时,记录采集每张图片时的机械坐标pm=[x
i y
i z
i a
i ci],其中xi为采集第i张图片时平动轴x的机械坐标,yi为采集第i张图片时平动轴y的机械坐标,zi为采集第i张图片时平动轴z的机械坐标,ai为采集第i张图片时平动轴a的机械坐标,ci为采集第i张图片时平动轴c的机械坐标。
[0123]
本实施例的其他部分与实施例1相同,故不再赘述。
[0124]
实施例8:
[0125]
本实施例在实施例1的基础上做进一步优化,在本实施例中,步骤a1.获取仅移动平动轴下采集的3n张图片对应的3n组旋转矩阵并取均值,然后进行满足旋转矩阵约束条件的奇异值分解,得到公式(3)中r
vw
的初始解;
[0126]
步骤a2.根据胶阀和相机坐标系{v}与工件坐标系{w}的运动学关系和相机成像关系,即分别通过公式(3)以及对应的拍照位姿下的外参旋转矩阵ri、外参平移向量ti,建立3n个关于未知数h
vm
、t
vm
的线性方程,求出公式(3)中h
vm
、t
vm
的初始解;
[0127]
步骤a3预设转动轴a轴在转动轴工件坐标系{w}下的方向向量为va=[k
x
,ky,kz]
t
,转动轴a轴上有点pa;根据在转动轴a轴等角度θ转动下的m张图片对应拍照位姿的外参旋转矩阵ri、外参平移向量ti,结合公式(4)可以建立m个关于未知数ra、ta方程,并计算获取转动轴a轴在工件坐标系下的轴向量va和轴上的点ta;
[0128]
步骤a4.预设转动轴c轴在转动轴c轴的坐标系{c}下的方向向量,根据步骤a3的方式,同理可以获取转动轴c轴在工件坐标系下的轴向量vc和轴上的点tc。
[0129]
获取仅移动平动轴下采集的3n张图片对应的3n组旋转矩阵ri和偏移向量ti,根据机器人运动学方法中相邻坐标系的转换关系,即用旋转矩阵和平移向量或者齐次变换矩阵描述的坐标系转换关系,结合公式(3)可得r
vw
=riꢀꢀ
(6);
[0130]
上式中各个符号意义同前所述。
[0131]
由于通过每张图片获得得旋转矩阵ri存在误差,因此对3n张图片对应的3n组旋转矩阵并取均值,并进行满足旋转矩阵约束条件的奇异值分解,得到初始解r
vw
;
[0132][0133]
上式中各个符号意义同前所述。
[0134]
根据3n图片可以建立3n个关于未知数h
vm
和t
vm
的矩阵方程,矩阵h
vm
和向量t
vm
共包含未知数12个,因此当方程数大于等于12个时,即n大于等于4时,即可求解出矩阵h
vm
和向量t
vm
的最小二乘解,即为h
vm
和t
vm
的初始解。
[0135]
在本实施例中,获取仅旋转转动轴a下采集的m张图片对应的m组旋转矩阵ri和偏移向量ti,假设a轴在坐标系{w}下的方向向量为va=[k
x
,ky,kz]
t
,a轴上有点ta,根据罗德里格斯旋转公式,由va,θ可求得旋转矩阵r(a),
[0136]
[0137]
式中i为单位矩阵,θ为a轴旋转角度,其他参数意义同前。
[0138]
根据公式(4)以及每张图片对应得旋转矩阵,
[0139]rvw
·
r(a)=riꢀꢀ
(9)
[0140]
根据每一张图片可以求出一组对应的va,对m组va求均值并单位化,即可得到a轴旋转轴向量的初始解va;
[0141]
根据公式(4)以及每张图片对应得偏移向量矩阵,
[0142][0143]
根据m图片可以得到m个关于未知数t
aw
的方程,因此,当m大于等于3时即可得到t
aw
的最小二乘解,即为a轴上点ta在工件坐标系下的坐标值。
[0144]
同理得到c轴的旋转轴向量vc和ta在工件坐标系下的坐标值。
[0145]
本实施例的其他部分与实施例1相同,故不再赘述。
[0146]
实施例9:
[0147]
本实施例在实施例1的基础上做进一步优化,在本实施例中,首先根据运动学模型,根据相邻坐标系间的转换关系,得到工件坐标系{w}相机坐标系{v}的变换关系的各个初始解。
[0148]
机坐标系{v}到像素坐标系{e}的变换如下:pe=k
·
pvꢀꢀ
(13)其中k是相机内参矩阵;
[0149]
根据公式(2)和公式(13)计算像素坐标
[0150]
根据标定板上的点在像素坐标系下的理论值和测量值之差的模的和最小(共采集了n组图片及机床坐标,从标定板上选择了m个点进行计算)建立优化目标函数,并表示为:
[0151][0152][0153]
其中指的是通过五轴机床运动学模型和相机成像模型计算得来的第i张图的第j个标定点像素坐标,指的是通过图像处理提取的第i张图的第j个标定点的像素坐标。k是相机内参矩阵,r
va
是{a}相对{v}的旋转矩阵,h
vm
是平动轴仿射矩阵,t
vm
是平动轴静态偏移向量,r
ac
指{c}相对{a}的旋转矩阵,t
ac
指{c}相对{a}的平移向量,r
cw
是{w}相对{c}的旋转矩阵,t
cw
是{w}相对{c}的平移向量,是第i张图第j个标定点在{w}下的世界坐标;
[0154]
目标函数雅克比矩阵j可以表示为:
[0155][0156]
其中分别表示目标函数对内参矩阵k、旋转矩阵r
va
、旋转矩阵r
ac
、平移向量t
ac
、旋转矩阵r
cw
、平移向量t
cw
、仿射矩阵h
vm
、平移向量t
vm
求偏导,结合公式(2)和链式求导法则,可以较容易的得到其具体的
数值。
[0157]
求解优化目标函数前需要设置求解参数的初始值,其中根据前文h
vm
、t
vm
的初始值已知,令r
ac
=e(e为单位矩阵)、r
cw
=e、t
ac
=t
c-ta、t
cw
=-tc、旋转矩阵r(a)、r(c)的转轴为转动轴a、c在工件坐标系下的向量va和vc,至此,优化目标函数可以开始求解;
[0158]
可知优化目标函数为非线性函数,可根据l-m算法对优化函数进行求解,得到r
va
、r
ac
、t
ac
、r
cw
、t
cw
、h
vm
、t
vm
的最优解。
[0159]
本实施例的其他部分与实施例1相同,故不再赘述。
[0160]
实施例10:
[0161]
本实施例在实施例1的基础上做进一步优化,在本实施例中,将h
vm
按列拆分得到x轴、y轴、z轴在相机坐标系下的轴向量v
x
,vy,vz,单位化后得到再将va和vc通过坐标系间的转换关系得到a轴、c轴在相机坐标系下的轴单位向量va和由夹角公式:
[0162][0163]
得到x轴和y轴的夹角α
xy
,并获取其他任意两轴之间的夹角,根据公式(3)-公式(16)获取公式(2)中的各个参数矩阵,并建立工件坐标系{w}、胶阀和相机坐标系{v}和机床基座坐标系{m}三者的转换关系;后续的误差补偿也可依据公式(2)进行。
[0164]
本实施例的其他部分与实施例1相同,故不再赘述。
[0165]
以上所述,仅是本发明的较佳实施例,并非对本发明做任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化,均落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
