技术特征:
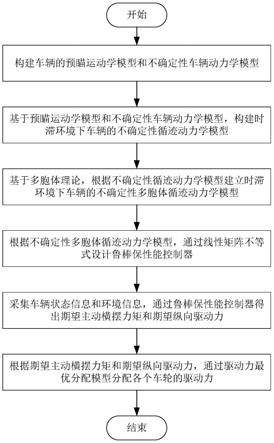
1.一种不可靠数据传输环境下的车辆鲁棒保性能控制器设计方法,其特征在于,包括:构建预瞄运动学模型和不确定性车辆动力学模型;基于预瞄运动学模型和不确定性车辆动力学模型,构建时滞环境下车辆的不确定性循迹动力学模型;基于多胞体理论和不确定性循迹动力学模型,建立时滞环境下车辆的不确定性多胞体循迹动力学模型;根据所述不确定性多胞体循迹动力学模型,采用线性矩阵不等式设计鲁棒保性能控制器。2.根据权利要求1所述的车辆鲁棒保性能控制器设计方法,其特征在于,基于小航向角误差假设构建frenet-serret坐标系下的预瞄运动学模型。3.根据权利要求1所述的车辆鲁棒保性能控制器设计方法,其特征在于,基于三自由度车辆动力学模型,建立以轮胎侧偏刚度为范数有界的不确定参数的不确定性车辆动力学模型。4.根据权利要求1-3任一所述的车辆鲁棒保性能控制器设计方法,其特征在于,根据所述不确定性多胞体循迹动力学模型,通过包含二阶积分的lyapunov-krasovskii泛函和线性不等式方法设计鲁棒保性能循迹控制器。5.一种不可靠数据传输环境下的车辆鲁棒保性能纵横向耦合控制方法,其特征在于,包括:采用如权利要求1-4任一所述的车辆鲁棒保性能控制器设计方法,构建时滞环境下车辆的鲁棒保性能控制器;通过设计好的鲁棒保性能控制器进行车辆控制。6.根据权利要求5所述的车辆鲁棒保性能控制器设计方法,其特征在于,所述通过设计好的鲁棒保性能控制器进行车辆控制,包括:通过所述鲁棒保性能控制器计算期望主动横摆力矩和期望纵向驱动力;根据所述期望主动横摆力矩和期望纵向驱动力,采用最优化方法分配各个车轮的驱动力。7.根据权利要求6所述的车辆鲁棒保性能控制器设计方法,其特征在于,分配各个车轮的驱动力包括:设定最优分配目标函数和优化约束;根据最优分配目标和优化约束建立驱动力最优分配模型;基于驱动力最优分配模型,根据所述期望主动横摆力矩和期望纵向驱动力分配各个车轮的驱动力。
技术总结
本发明公开了一种不可靠数据传输环境下车辆鲁棒保性能耦合控制方法,该控制方法采用设计的不可靠数据传输环境下车辆的鲁棒保性能控制器进行车辆控制。鲁棒保性能控制器的设计方法包括:通过预瞄运动学模型和不确定性车辆动力学模型,构建时滞环境下车辆的不确定性循迹动力学模型,并基于多胞体理论,车辆的不确定性多胞体循迹动力学模型,最后采用线性矩阵不等式设计鲁棒保性能控制器。考虑到了由时变参数、未建模误差等引起的模型失配问题,引入H∞、保性能指标,建立车辆鲁棒保性能控制器,实现在不可靠数据传输环境下的车辆纵横向耦合运动控制,具有良好的抗扰能力和工况适应性,能够快速地消除运动跟踪误差和有效地保障车辆的横向稳定性。车辆的横向稳定性。车辆的横向稳定性。
技术研发人员:郑玲 张紫微 李以农 张志达 郑浩
受保护的技术使用者:重庆大学
技术研发日:2021.11.26
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。