技术特征:
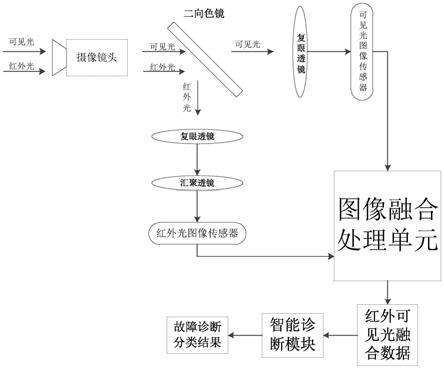
1.一种基于共轴光路成像的设备故障诊断系统,其特征在于,通过采集故障设备的可见光图像数据、红外光图像数据并进行融合,得到红外可见光融合数据,通过红外可见光融合数据对故障设备进行设备故障诊断;其中,所述可见光图像数据、红外光图像数据通过共轴光路成像设备对故障设备进行共轴图像采集,叠加融合得到;所述共轴光路成像设备包括摄像镜头、二向色镜、复眼透镜、汇聚透镜、可见光图像传感器、红外光图像传感器和图像融合处理单元;所述摄像镜头用于采集成像区域内的混合波段光,所述混合波段光包括可见光波段和红外光波段,所述可见光波段和红外光波段呈共轴状态;所述二向色镜用于对混合波段光进行分光处理,包括透光面与反光面,所述可见光波段通过透光面透出,进入可见光支路;所述红外光波段通过反光面反射射出,进入红外光支路;所述可见光支路处设置有复眼透镜,并透过复眼透镜射在可见光图像传感器上;所述红外光支路依次设置有复眼透镜、汇聚透镜,并透过复眼透镜、汇聚透镜射在红外光图像传感器;所述可见光图像传感器、红外光图像传感器分别与图像融合处理单元电性连接,所述图像融合处理单元输出红外可见光融合数据。2.根据权利要求1所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,所述可见光图像传感器通过如下步骤得到可见光图像数据:s1混合波段光通过摄像镜头进入共轴光路成像设备;s2通过二向色镜将对混合波段光进行分光处理,可见光波段通过透光面透出,进入可见光支路;s3通过复眼透镜对可见光支路的可见光波段进行均光整形;s4通过可见光图像传感器采集可见光图像数据,所述可见光图像传感器包括若干感光点,每个感光点采集对应位置的像素信息,所述可见光图像数据以f(x,y);x<m,y<n进行表示,其中,x,y分别表示可见光图像的像素点坐标,f(x,y)表示对应像素点坐标的像素信息,所述可见光图像数据的分辨率为m*n。3.根据权利要求2所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,所述红外光图像传感器通过如下步骤得到红外光图像数据:d1混合波段光通过摄像镜头进入共轴光路成像设备;d2通过二向色镜将对混合波段光进行分光处理,红外光波段通过反光面反射射出,进入红外光支路;d3通过复眼透镜对红外光支路的红外光波段进行均光整形;d4通过汇聚透镜对对红外光支路的红外光波段进行汇聚增强;d4通过红外光图像传感器采集红外光图像数据,所述红外光图像传感器包括若干红外感光点,每个红外感光点采集对应位置的红外像素信息,所述红外光图像数据以g(a,b);a<p,b<q进行表示,其中,a,b分别表示红外光图像的像素点坐标,g(a,b)表示对应像素点坐标的像素信息,所述红外光图像数据的分辨率为p*q。4.根据权利要求3所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,所述图像融合处理单元通过如下步骤得到红外可见光融合数据:g1分别采集可见光图像数据、红外光图像数据;g2比较可见光图像数据、红外光图像数据的分辨率,并计算行差值(m-p)与列差值(n-q);
g3通过超分辨率算法对红外光图像数据进行插值,并按照差值(m-p)与列差值(n-q)将红外光图像数据分辨率提高为m*n,其中,g(x,y);x<m,y<n;可见光图像数据、红外光图像数据目标范围和分辨率相同,像素坐标一一对应;g4根据预置的红外测温算法c(x,y),对红外光图像数据g(x,y)进行红外-温度转换,将红外光图像数据g(x,y)的原始灰度数据转换为温度值数据p(x,y)=c(x,y)
×
g(x,y);g5构建红外可见光融合数据,所述红外可见光融合数据通过三维数据d(x,y,z)进行表示,其中,所述三维数据d(x,y,z)的x轴数据、y轴数据分别使用可见光图像数据f(x,y)进行对应填充;z轴数据使用对应x,y坐标的温度值数据p(x,y)进行填充。5.根据权利要求4所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,还对红外可见光融合数据进行进一步处理,得到故障设备数据,所述故障设备数据通过如下步骤得到:h1通过共轴光路成像设备采集若干正常设备的红外可见光融合数据,并进行人工/机器分析,得到正常设备温度函数t(x,y),其中,x,y表示正常设备图像的位置坐标,t(x,y)表示x,y位置坐标对应的正常温度值;h2通过共轴光路成像设备采集故障设备的红外可见光融合数据,得到故障设备的温度值数据p(x,y);h3通过正常设备温度函数t(x,y)与故障设备的温度值数据p(x,y)进行点对点作差;得到温差数据δt(x,y),其中,δt(x,y)为绝对值数据;h4通过人工设置有正常温度波动值t0;h5通过正常温度波动值t0与温差数据δt(x,y)进行逐点比较,得到故障设备数据e(x,y);其中,若任一坐标x=j,y=k对应的温差数据δt(j,k)大于正常温度波动值t0,则将温差数据δt(j,k)对应坐标记录于故障设备数据e(j,k)中;若任一坐标x=j,y=k对应的温差数据δt(j,k)不大于正常温度波动值t0,则将故障设备数据e(j,k)填充为0;逐点填充,得到故障设备数据e(x,y)。6.根据权利要求5所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,还设置有智能诊断模块,所述设备故障诊断通过人工和/或智能诊断模块进行;若设备故障诊断通过人工进行,则将故障设备数据e(x,y)筛除异常数据点后以图像形式进行输出;若设备故障诊断通过诊断模块进行,则将故障设备数据e(x,y)输入智能诊断模块,所述智能诊断模块根据故障设备数据e(x,y)对故障进行分类识别。7.根据权利要求6所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,所述智能诊断模块通过如下步骤进行构建:g1采集大量故障设备数据e(x,y),并对故障类型进行人工标注,得到标注数据集;g2对标注数据集进行数据扩增,包括通过复制、旋转、填充、形变的扩增方式,得到训练数据集;g3将训练数据集分为训练集与测试集;g4将训练集输入分类神经网络模型进行训练,得到训练输出模型;g5通过测试集对训练输出模型进行测试验证,得到分类准确率;g6若分类准确率满足设置阈值,则将训练输出模型输出为智能诊断模块;g7若分类准确率不满足设置阈值,则重复g4、g5步骤,直至得到满足设置阈值的训练输
出模型或人工结束训练。8.根据权利要求7所述的一种基于共轴光路成像的设备故障诊断系统,其特征在于,通过共轴光路成像设备和智能诊断模块能对设备进行实时故障监测,当进行实时故障监测时,共轴光路成像设备采集被监控设备的实时图像,并得到实时的红外可见光融合数据;通过对红外可见光融合数据进行处理,得到实时的故障设备数据e(x,y);将故障设备数据e(x,y)进行抽帧,并将抽帧后的故障设备数据e(x,y)输入智能诊断模块进行故障分类匹配;若故障匹配成功,则发出设备故障报警;若未匹配成功,则继续执行实时故障监测直至监测结束。
技术总结
本发明提供一种基于共轴光路成像的设备故障诊断系统,涉及电站运维装置领域。本发明通过共轴光路成像设备采集共轴对应的红外可见光融合数据,融合了红外光特征与可见光特征的红外可见光融合数据更具代表性,通过红外可见光融合数据进行故障诊断其准确度也更高;通过超分辨率算法、红外测温算法进行图像融合处理,得到RGB_T图像,通过严格位置对应的RGB_T图像能更加详尽地反应设备的红外特征,有助于设备的故障分析判断;通过共轴光路成像设备和智能诊断模块能对设备进行实时24小时的不间断故障监测,在故障发生时进行报警,通知相应人员,相较于现阶段纯人工的方式,能以很低的人力成本实现实时监测。人力成本实现实时监测。人力成本实现实时监测。
技术研发人员:杜东伟 张翅飞 赵付华 李建祥 周波 刘江涛
受保护的技术使用者:四川华能宝兴河水电有限责任公司
技术研发日:2021.11.19
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。