技术特征:
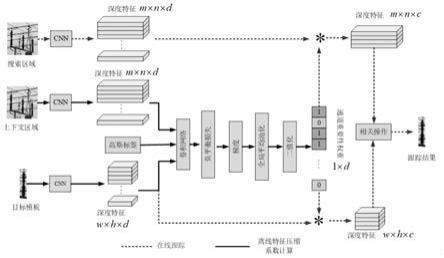
1.一种基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,所述方法包括步骤:步骤1,根据需要跟踪的电力设备及相应的坐标确定上下文区域图像,将上下文区域图像输入预先训练的卷积神经网络,提取包含待跟踪电力设备及其背景区域的深度特征;步骤2,构造一单层卷积网络,将待跟踪电力设备及其背景区域的深度特征与给定的高斯软标签y一起输入网络,利用负平衡损失学习直到网络收敛,得到收敛网络内部存储的梯度信息;步骤3,利用全局平均池化将每个通道的反向传播的梯度进行量化得到每个通道深度特征的初始重要性权值δ
i
,将初始重要性权值二值化得到最终的重要性权重δf
i
;步骤4,在跟踪时,仅在第一帧提取目标模板深度特征χ1,将下一帧搜索区域图像输入预先训练的卷积神经网络提取深度特征χ
t
,然后利用δf
i
对χ
t
与χ1进行压缩得到χ
′
t
与χ
′1;步骤5,将压缩后的目标模板特征与搜索区域特征送入匹配网络进行互相关操作获得最终的响应图,响应值最大处即为目标位置。2.根据权利要求1所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤1中,相应的坐标包含左上角纵横轴位置及长宽,形成矩形框;根据坐标信息计算电力设备为中心的规定长宽的上下文区域图像;上下文区域图像包括待跟踪电力设备以及背景区域。3.根据权利要求1所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤1中,提取深度特征包括:将图像输入预先训练的卷积神经网络进行一次前向传播,提取网络的conv4_3与conv4_1层特征,然后将两层特征拼接得到最终的深度特征。4.根据权利要求1所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤2中,负平衡损失为:其中,*是相关操作,λ是正则化参数,x是从待跟踪电力设备及其背景区域的深度特征上采取滑窗操作获取的样本,w是网络权值,y是高斯软标签,t(
·
)是用来平衡困难负样本与简单负样本平衡的函数。5.根据权利要求4所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,用来平衡困难负样本与简单负样本平衡的函数t(
·
):其中,m和n是两个超参数,r是损失w*x-y。6.根据权利要求1所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤3中,计算每个通道深度特征的初始重要性权值方法为:
其中,i是每个通道特征的索引,g
ap
(
·
)是全局平均池化函数,l是负平衡损失函数,z
i
为第i个通道的深度特征。7.根据权利要求6所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤3中,计算每个通道深度特征的最终重要性权值方法为:当初始重要性权值大于0时,则最终重要性权值为1,即保留该通道特征;当初始重要性权值小于等于0时,则最终重要性权值为0,即删除该通道特征。8.根据权利要求1所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤4中,深度特征压缩方法为:其中,χ是压缩前的深度特征,χ
′
是压缩后得到的深度特征,是相乘操作。9.根据权利要求8所述的基于目标感知深度特征压缩的电力智能巡检跟踪方法,其特征在于,步骤5中,获得目标的位置方法为:其中,t当前帧的索引,χ
′1是压缩后的模板特征,χ
′
t
是第t帧压缩后的搜索区域特征。
技术总结
本发明公开了一种基于目标感知深度特征压缩的电力智能巡检跟踪方法,将需要跟踪的电力设备图片输入预先训练的卷积神经网络,提取包含待跟踪电力设备及其背景区域的深度特征;并与给定的高斯软标签一起输入单层卷积网络,利用负平衡损失学习直到网络收敛;利用全局平均池化将每个通道的反向传播的梯度进行量化得到初始重要性权值,二值化得到最终的重要性权重;在跟踪时,仅在第一帧提取目标模板深度特征,将下一帧搜索区域图像提取深度特征,并进行压缩;将压缩后的目标模板特征与搜索区域特征进行相关操作获得目标的位置。本发明通过反向传播网络梯度获得重要性权重来指导深度特征压缩过程,获得简洁深度特征以降低运算成本,提高跟踪鲁棒性。提高跟踪鲁棒性。提高跟踪鲁棒性。
技术研发人员:郭志民 王棨 田杨阳 张焕龙 程利云 李暖暖 刘昊 袁少光 张杰 毛万登 赵健 齐企业 贺翔 万迪明 耿俊成
受保护的技术使用者:国网河南省电力公司
技术研发日:2021.11.17
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。