一种快速离线建库的室内csi指纹定位方法
技术领域
1.本发明属于室内定位技术领域,具体涉及一种基于计算机视觉技术实现快速离线建库的室内信道状态信息(channel state information,csi)指纹定位方法。
背景技术:
2.在室内定位领域,指纹定位因其具有高精度定位的潜力,成为了当下的研究热点。指纹定位分为离线建库和在线定位两个环节:离线建库环节中,需要采集各个参考点处的信号指纹,构建离线指纹地图库。在线定位环节中,需要将待测点采集到的信号指纹与指纹地图库中的指纹向量进行匹配,找到指纹相似度较大的参考点,并利用这些参考点的位置坐标估计待测点的位置。
3.离线建库环节的常用方案是人工手动建库,该方案需要将待定位区域网格化,并在每一个网格区域内选取代表点(参考点),测量该代表点的信号特征,经过处理后生成信号指纹。最终,这些参考点的位置和其对应的信号指纹一一匹配并存储,即可得到指纹地图库。该过程的巨大开销问题也成为了指纹定位广泛应用的瓶颈。
4.因此,一些自动建库的方案被提出。例如基于众包的指纹采集方案利用用户携带的移动设备传感器跟踪其位置,同时采集信号指纹,以此构建指纹地图库(参考文献[1])。尽管基于众包的建库方法一定程度上缓解了建库开销问题,但该过程仍难以避免大量的人员参与,并且该过程易受环境和人员影响,难以得到高精度的指纹库。
[0005]
另一种自动建库方案依赖分布在室内的传感器或智能体定期收集信号指纹,该方法避免了人员参与(参考文献[2])。但是,无论是大量智能设备的投放,还是智能设备本身位置的获取,都导致该方法需要较大的财力投入和较高的系统复杂度。因此,研究具有低复杂度和低开销的自动化指纹建库方案,是指纹定位系统能否在实际中广泛应用的一项重要工作。
[0006]
参考文献:
[0007]
[1]zhao w,han s,hu r q,et al.crowdsourcing and multisource fusion-based fingerprint sensing in smartphone localization[j].ieee sensors journal.2018,18(8):3236-3247.
[0008]
[2]gucciardo m,tinnirello i,dell'aera g m,et al.a flexible 4g/5g control platform for fingerprint-based indoor localization[c]//ieee infocom 2019-ieee conference on computer communications workshops(infocom wkshps).ieee,2019.
技术实现要素:
[0009]
本发明为解决指纹定位离线建库环节的巨大开销问题,提出了一种快速离线建库的室内csi指纹定位方法,实现计算机视觉辅助的自动化建库,缓解了指纹建库环节大量的人力或物力投资,提高了指纹定位系统的易用性。
[0010]
本发明的快速离线建库的室内csi指纹定位方法,包括如下4个步骤:
[0011]
步骤1,离线采集室内场景csi和位置信息;
[0012]
在场景中固定发射机和摄像头,让搭载接收机的运动载体在室内环境中游走,采集各参考位置的csi以及运动载体的视频图像。
[0013]
步骤2,采集和构造训练样本,离线训练目标检测模型;
[0014]
按照步骤1中方式采集视频图像,训练样本是对视频帧采样,对图像中的运动载体位置进行标定得到;目标检测模型采用faster rcnn模型,将视频图像输入模型,检测输出运动载体位置。
[0015]
步骤3,解析运动载体位置信息;
[0016]
每隔固定时间利用训练好的目标检测模型对视频图像进行目标检测,并在该时间间隔内对目标进行跟踪。
[0017]
对目标检测模型引入带权先验框,具体是:在每个时间间隔对目标跟踪结束后,利用跟踪结果为目标检测提供位置先验,设置在上次目标区域附近的像素点具有更高的先验权重。
[0018]
步骤4,构建离线指纹地图库,基于指纹地图路进行在线定位。
[0019]
所述的步骤4中,构建离线指纹地图库包括:
[0020]
(4.1)将采集的csi和运动载体位置进行时间同步;
[0021]
(4.2)对csi序列平滑处理;
[0022]
(4.3)对csi序列进行采样;
[0023]
其中,基于csi相似性进行时间采样,具体是:设置csi相似度阈值范围,设上一个采样点为a,将a作为当前点,经过a经过步长step找到下一个候选采样点b,计算a和b之间的csi相似度;若a和b的相似度高于阈值上限,丢弃b,并将b作为新的当前点,继续以步长step寻找下一个候选采样点;若a和b的相似度低于阈值下限,设置步长step减半,重新以a为当前点寻找下一个候选采样点;若a和b的相似度位于阈值范围内,则将b作为a的下一个合法采样点;
[0024]
(4.4)对每一个csi采样点,提取出csi的幅度和相位信息构建csi指纹,和对应时刻的位置坐标一一匹配并存储,得到离线指纹地图库。
[0025]
相对于现有技术,本发明的优点在于:
[0026]
面对指纹建库的巨大开销问题,本发明借助现如今发展已经较为成熟的目标检测和目标跟踪算法,在指纹定位离线建库环节中,利用摄像头拍摄搭载接收机的运动载体,随后解析视频信息自动获取目标位置,从而降低了离线建库的复杂性。同时,本发明利用了目标在短时间内的空间相关性,将目标跟踪算法和目标检测算法相结合,构建了一个具有低开销和高鲁棒性的自动化指纹库建立系统。
附图说明
[0027]
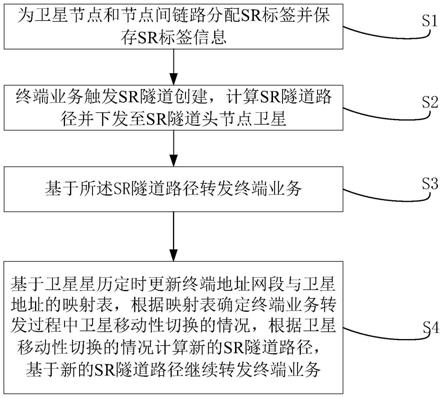
图1是本发明的快速离线建库的室内csi指纹定位方法的整体流程图;
[0028]
图2是本发明方法的实验场景示意图。
具体实施方式
[0029]
下面结合附图和实施例对本发明进行详细说明。
[0030]
本发明提出的一种快速离线建库的室内csi指纹定位方法,基于计算机视觉辅助实现自动离线建库,并基于此构建室内csi指纹定位系统。如图1所示,本发明方法包括以下五个步骤。
[0031]
第一步,离线采集csi和位置信息。
[0032]
本发明基于无线通信系统,例如wi-fi,lte,5g等的收发设备采集信号csi。
[0033]
本发明实施例设置的实验场景如图2所示:发射机tx位置固定,让搭载接收机的运动载体,例如小车,在室内环境中游走,采集各位置的csi,同时高帧率摄像头记录下对应的画面信息。在之后的处理中,可以利用这些画面获取小车的位置信息,用于构建指纹库。本发明实施例中摄像头位于实验场景的右下位置的高处,能以俯视角度拍摄整个实验区域。
[0034]
在具体实验过程中,提供如下建议:
[0035]
(1)摄像头固定,并且尽可能采用俯视视角拍摄运动载体,以充分利用画面信息。
[0036]
(2)对于小车在待定位区域的运动方式,由于随机游走难以较好地覆盖二维平面区域,容易在某些区域造成对参考点的欠采样或过采样,因此更推荐采用有规律的运动轨迹来采集参考点,例如横纵交错的网格轨迹。
[0037]
(3)由于csi对位置的高分辨率主要来自于各个位置独一无二的多径反射特点,los(line of sight)环境中的直射径会很大程度上干扰各个反射径带来的具有空间特异性的csi特征,因此推荐采用nlos(non line of sight)场景进行csi指纹定位。如图2,可利用金属挡板阻挡发射天线对实验区域的直射路径创造nlos条件。
[0038]
(4)运动载体在室内游走时,该载体搭载的天线可能处于多种朝向。因此要求运动载体具有较高的圆对称性,防止其处于不同朝向时影响发射天线的周围环境,同时收发天线也应该具有足够好的全向性。
[0039]
第二步,采集和构造训练样本,离线训练目标检测算法模型。
[0040]
首先,构造训练样本,事先采集多种场景下运动载体的游走视频,对视频帧进行采样,得到多张图片,对图片中的运动载体位置进行标定,即可作为目标检测模型的训练样本。
[0041]
然后,训练目标检测神经网络并保存模型。
[0042]
本步骤的目的是训练目标检测模型,用于在后续环节中从视频中自动解析运动载体的位置,因此原则上包括faster rcnn(regions with convolutionalneural network)、yolo(you only look once)、ssd(single shot multibox detector)等在内的已经发展较为成熟的目标检测算法都可以在本步骤中使用。由于yolo和ssd都是直接对目标所在区域进行回归预测,属于one-state算法,这类往往通过牺牲检测精度以换取更高的检测实时性。而在指纹定位中,指纹库的建立对位置精度有着较高要求,并且该环节允许离线进行,这减轻了对目标检测算法实时性的依赖,此时采用检测精度更高的two-stage算法faster rcnn成为了更优的选择。另外,由于运动载体在室内环境中游走会带来目标多尺度变化的问题,当前已有较多针对该问题的改进方法,因此本发明推荐使用具有多尺度目标检测能力的faster rcnn作为本步骤的目标检测模型。
[0043]
第三步,解析运动载体位置信息。
[0044]
第二步训练完成的模型可以在本步骤中对视频分帧后的图片进行目标检测,获得小车位置。但是,目标检测模型对所有的图片都进行独立检测,并且大量的视频帧将导致检测过程具有相当高的时间复杂度。考虑到运动载体在短时间内的位置相关性,可以在本步骤中引入目标跟踪算法:例如每隔固定时间由faster rcnn检测目标,在该时间间隔内采用常见的核相关滤波跟踪算法(kcf,kernel correlation filter)对目标进行跟踪,以充分利用目标的位置相关性提高该过程的稳定性,同时降低计算量开销。
[0045]
指纹室内定位场景相较于传统的目标检测和跟踪主要有两点不同,本发明基于实例提出了针对性的改进:
[0046]
(1)室内环境较复杂,易于出现与目标物(运动载体)类似的物品,导致算法检测或跟踪的目标物出现差错。传统场景倾向于检测和跟踪画面中所有的目标物,而指纹室内定位场景下只有搭载天线的运动载体这一唯一目标,因此为了让faster rcnn检测目标位置时保持对原目标的跟踪状态,防止跟踪目标发生变化,本发明为faster rcnn算法引入了带权先验框:常见的目标检测算法需要在原始图片的各个位置设置多种尺度的先验框,并认为目标等概率地出现在每一个先验框内,本发明在每次kcf跟踪目标结束后,利用kcf的跟踪结果为目标检测提供位置先验,即在上次目标区域附近的像素点具有更高的先验权重,权重在空间的分布形式可以自行设置(例如二维高斯窗),这样可以有效降低对周边其他物体的注意力,较好地避免了检测或跟踪到非目标物。
[0047]
(2)指纹地图库构建是离线进行的,传统的目标跟踪算法倾向于实时跟踪。所以在离线处理数据的过程中可以充分利用未来信息。具体的,这里主要体现为对置信度较低的目标位置进行后处理:在目标检测过程中,检测模型会输出目标的位置序列以及置信度序列,利用异常检测算法检测出异常数据点,对当前点进行异常检测时可以同时利用历史信息和未来信息,对于异常结果可以通过插值处理进行修复。
[0048]
第四步,构建离线指纹地图库。
[0049]
首先,将csi和位置信息进行时间同步。如果csi采集设备每隔一段时间需要进行重新同步,同步过程中不能输出csi估计值,那么这种情况下需要记录并输出每次重新同步的时间,以及重新同步标志,用于数据处理过程中实现csi信息和位置信息的时间同步。
[0050]
接着,对csi平滑处理,时域和频域的csi平滑处理能够对噪声进行有效抑制。本发明优选在csi曲线变化较小的前提下,时域上选取较长的平滑窗口以实现对噪声的抑制;频域则推荐设置较短的平滑窗口以避免csi曲线丢失频域细节。
[0051]
然后,对csi序列和位置序列进行采样和匹配。固定时间间隔的采样方法适应性较差,因为有的位置csi变化更快,或者有些时刻运动载体速度较快,此时csi在时间上的采样应该更密集,防止在线定位时待测点周围没有参考点。同样有些时候csi随时间变化较慢,需要更大的时间采样间隔来避免无效和重复的csi采样,因此本发明基于csi曲线相似度变化是否在一定的阈值范围内来进行采样。具体地,本发明基于csi相似性进行时间采样,基本思想是:设置csi相似度阈值范围(包含上限和下限),假设上一个采样点为a,此时目标是找到下一个采样点:首先将a作为当前点,a经过步长step找到下一个候选采样点b,如果a和b之间的csi相似度太高,大于阈值上限,则丢弃b这一候选采样点,并把b作为新的当前点,从b开始增加step继续尝试;如果当前点和候选采样点相似度太低,低于阈值下限,则当前点不变,令step=step/2,继续寻找下一个候选采样点。不断执行上述操作直到csi的相似
度在阈值范围内,此时符合条件的采样点即为a的下一个合法采样点。
[0052]
最后,对每一个csi采样点,提取出csi的幅度和相位信息构建csi指纹,和对应时刻的位置坐标一一匹配并存储,便得到csi指纹库。
[0053]
第五步,在线定位。
[0054]
根据第一步到第四步建立好的指纹地图库,对待测点进行在线定位:从指纹库中检索出与待测点指纹相似的参考点,根据参考点的位置坐标即可估计出待测点的位置。
[0055]
本发明方法利用运动载体在室内场景中游走来采集各处的csi,通过训练好的目标检测模型识别出运动载体位置,进而将csi和运动载体位置匹配构建指纹地图库,不需要人工在场景中测量,避免大量的人员参与,并且本发明方法能快速获得高精度的指纹库,实现降低指纹建库的巨大开销的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。