1.本发明涉及船舶对接技术领域,特别涉及一种用于无人艇对接的连接器机构。
背景技术:
2.海洋的开发与研究在海洋科技领域的地位日益提高。其中,无人艇凭借其体积小、吃水浅以及无人化等特点在海洋科技的诸多方面受到越来越多的青睐。然而随着需求的不断提高,无人艇在复杂海况中的局限性越来越大,尤其是续航能力方面的短板特别突出。由于能耗及安全问题,航行范围始终受限,多位于近海区域。如何扩大无人艇的航行范围以实现更多成为无人艇研究领域的主要课题。
3.在相关技术中,通常采用在多个无人艇之间设置连接器,使多个无人艇在纵向下相互连接下以减小阻力和增加航程,在其他连接形式下也可以形成多功能平台。
4.然而目前常见的对接连接器有太空飞船对接和动车组列车对接,太空飞船在真空中可以实现无阻力和无扰动精确对接,列车组可以在固定轨道上实现精确对接,而无人艇在海上对接时容易受到风浪流等随机和不规则的扰动载荷影响,导致在远程操控情况下对接精准度差,成功率低,往往需要反复尝试影响相关实验和工作效率。
技术实现要素:
5.本发明实施例提供了一种用于无人艇对接的连接器机构,结构简单,对接方便,能够提高无人艇在风浪影响下的对接成功率。技术方案如下:
6.本发明实施例提供了一种用于无人艇对接的连接器机构,该用于无人艇对接的连接器机构包括:
7.第一连接部,用于设置在无人艇的船艏,所述第一连接部包括第一安装体和连接杆,所述第一安装体上具有安装槽,所述连接杆的一端可伸缩地安装在所述安装槽中,所述连接杆的另一端具有第一锁止结构;
8.第二连接部,用于设置在所述无人艇的船艉,所述第二连接部包括第二安装体,所述第二安装体上具有卡接凹槽和锥形面导向板,所述锥形面导向板上具有锥形导向孔,所述锥形导向孔的一端与所述卡接凹槽的槽口连接,所述锥形导向孔的另一端位于所述卡接凹槽内部,所述锥形导向孔的孔径沿靠近所述卡接凹槽的底壁的方向逐渐减小,所述锥形导向孔的另一端设置有与所述第一锁止结构相匹配的第二锁止结构,所述连接杆被配置为能够沿所述锥形导向孔伸入所述卡接凹槽内部,并通过所述第一锁止结构与所述第二锁止结构相配合,以与所述第二安装体锁止固定。
9.可选地,所述第一锁止结构为限位块,所述限位块具有圆形限位面,所述连接杆的另一端与所述圆形限位面垂直连接,所述连接杆与所述圆形限位面同轴,所述连接杆的直径小于所述圆形限位面的直径;
10.所述第二锁止结构包括两个楔形锁扣装置,所述两个楔形锁扣装置相对于所述锥形导向孔的直径对称布置,所述楔形锁扣装置包括楔形块和驱动装置,所述楔形块包括依
次连接的第一端面、第二端面、第三端面和第四端面,所述第一端面设置有转轴且通过所述转轴与所述锥形导向孔的另一端铰接,所述转轴平行于所述卡接凹槽的底壁且垂直于所述锥形导向孔的轴线,第二端面与第四端面呈锐角布置且在向所述锥形导向孔的另一端靠近的方向上间距逐渐减小,所述驱动装置安装在所述卡接凹槽内部且与所述转轴传动连接,所述第二锁止结构被配置为当所述楔形块的所述第三端面平行于所述卡接凹槽的底壁时,所述两个楔形锁扣装置中所述楔形块的所述第二端面与所述第三端面的连接处的间距与所述连接杆的直径相等。
11.可选地,所述锥形导向孔的另一端设置有多组所述第二锁止结构,多组所述第二锁止结构沿所述锥形导向孔的周向等角度间隔布置。
12.可选地,所述连接器机构还包括环形弹簧,所述第四端面上设置有两个限位挡板,所述两个限位挡板与所述第四端面垂直连接,且沿所述锥形导向孔的轴线方向间隔布置,所述环形弹簧环绕所述第二锁止结构设置且绕接在所述楔形块的所述第四端面上,所述环形弹簧位于所述两个限位挡板之间。
13.可选地,所述第一端面上凸出设置有第一限位凸块,所述第一限位凸块包括相反的第一侧面和第二侧面,所述第一侧面与所述第四端面连接,所述第二侧面与所述第一端面垂直连接,所述转轴设置在所述第一限位凸块上;
14.所述连接器机构还包括固定块,所述固定块连接在所述锥形导向孔的另一端,所述固定块具有平行于所述卡接凹槽的底壁的第五端面,所述第五端面上凸出设置有第二限位凸块,所述第二限位凸块包括相互连接的第三侧面和第四侧面,所述第三侧面平行于所述第五端面,所述第四侧面与所述第五端面垂直连接,所述第二锁止结构被配置为当所述楔形块的所述第三端面平行于所述卡接凹槽的底壁时,所述第三侧面与所述第一端面相抵接,所述第二侧面与所述第四侧面相抵接。
15.可选地,所述限位块的所述圆形限位面背向所述连接杆的一侧呈半球形,所述卡接凹槽的底壁上具有与所述限位块相匹配的圆弧凹槽。
16.可选地,所述连接杆的一端设置有滑动齿轮,所述安装槽的内壁上具有与所述滑动齿轮相匹配的齿条,所述齿条沿所述安装槽的长度方向布置,所述滑动尺寸与所述齿条相啮合。
17.可选地,所述连接杆包括第一杆体和第二杆体,所述滑动尺寸设置于所述第二杆体的一端,所述第二杆体的另一端与所述第一杆体通过万向节连接。
18.可选地,所述连接器机构还包括套筒,所述套筒的内壁上具有内螺纹,所述第一杆体和所述第二杆体中至少一个的侧壁上具有与所述套筒相匹配的外螺纹,所述套筒套接在所述第一杆体和/或所述第二杆体上并覆盖所述万向节。
19.可选地,所述第一安装体、所述连接杆和所述第二安装体均为不锈钢结构件。
20.本发明实施例提供的技术方案带来的有益效果至少包括:
21.通过将第一连接部安装设置在一艘无人艇的船艏部,将第二连接部安装设置在另一艘无人艇的船艉部,完成对无人艇连接器的安装。在需要进行两艘无人艇的海上对接工作时,首先通过控制安装有第一连接部的无人艇的船艏部靠近安装有第二连接部的另一艘无人艇的船艉部。之后控制连接杆由第一安装体的安装槽中伸出,直到与第二安装体上的锥形面导向板相接触。之后通过安装有第一连接部的无人艇本身的前进速度使两艘无人艇
进一步靠近,此时连接杆的另一端即会在锥形导向孔的孔壁导向下由接触点逐渐滑入到锥形导向孔孔径较小的另一端,并最终进入到第二安装体的卡接凹槽中。进入卡接凹槽中的连接杆即会通过第一锁止结构与设置于锥形导向孔的另一端的第二锁止结构相配合,实现连接杆与第二安装体的锁止固定,保证连接杆的另一端不会由卡接凹槽中脱离,从而完成两艘无人艇的海上对接。采用该连接器机构进行无人艇的对接,结构简单,仅需要两艘无人艇在水面上进行船艏与船艉的初步对正,使连接杆伸出第一安装体的一端能够和第二安装体上的锥形面导向板相接触,即可通过锥形导向孔实现连接杆的滑动引导并完成锁紧对接。大幅降低了两艘无人艇之间的对接精度要求,能够有效提高无人艇在风浪影响下的对接成功率。
附图说明
22.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1是本发明实施例提供的一种第一连接部的结构示意图;
24.图2是图1中a处的局部结构放大图;
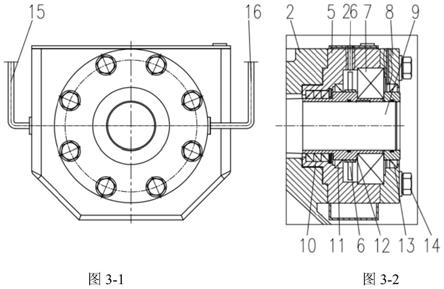
25.图3是本发明实施例提供的一种第二连接部的结构示意图;
26.图4是图3中b处的局部结构放大图;
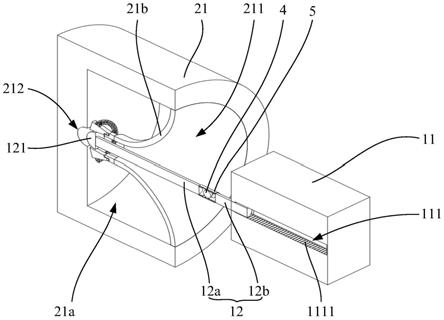
27.图5是本发明实施例提供的用于无人艇对接的连接器机构的立体结构配合示意图;
28.图6是本发明实施例提供的连接杆与锥形面导向板接触时的结构示意图;
29.图7是本发明实施例提供的连接杆上第一锁止结构进入卡接凹槽时的结构示意图;
30.图8是本发明实施例提供的连接杆上第一锁止结构进入卡接凹槽后的结构示意图;
31.图9是本发明实施例提供的用于无人艇对接的连接器机构释放连接杆的自由度后的结构示意图。
具体实施方式
32.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
33.在相关技术中,通常采用在多个无人艇之间设置连接器,使多个无人艇在纵向下相互连接下以减小阻力和增加航程,在其他连接形式下也可以形成多功能平台。
34.然而目前常见的对接连接器有太空飞船对接和动车组列车对接,太空飞船在真空中可以实现无阻力和无扰动精确对接,列车组可以在固定轨道上实现精确对接,而无人艇在海上对接时容易受到风浪流等随机和不规则的扰动载荷影响,导致在远程操控情况下对接精准度差,成功率低,往往需要反复尝试影响相关实验和工作效率。
35.图1是本发明实施例提供的一种第一连接部的结构示意图。图2是图1中a处的局部
结构放大图。图3是本发明实施例提供的一种第二连接部的结构示意图。图4是图3中b处的局部结构放大图。图5是本发明实施例提供的用于无人艇对接的连接器机构的立体结构配合示意图。图6是本发明实施例提供的连接杆与锥形面导向板接触时的结构示意图。图7是本发明实施例提供的连接杆上第一锁止结构进入卡接凹槽时的结构示意图。图8是本发明实施例提供的连接杆上第一锁止结构进入卡接凹槽后的结构示意图。图9是本发明实施例提供的用于无人艇对接的连接器机构释放连接杆的自由度后的结构示意图。如图1至图9所示,通过实践,本技术人提供了一种用于无人艇对接的连接器机构,包括第一连接部1和第二连接部2。
36.其中,第一连接部1用于设置在无人艇的船艏,第一连接部1包括第一安装体11和连接杆12。第一安装体11上具有安装槽111,连接杆12的一端可伸缩地安装在安装槽111中,连接杆12的另一端具有第一锁止结构121。
37.第二连接部2用于设置在无人艇的船艉,第二连接部2包括第二安装体21。第二安装体21上具有卡接凹槽21a和锥形面导向板21b,锥形面导向板21b上具有锥形导向孔211,锥形导向孔211的一端与卡接凹槽21a的槽口连接,锥形导向孔211的另一端位于卡接凹槽21a内部,锥形导向孔211的孔径沿靠近卡接凹槽21a的底壁的方向逐渐减小。锥形导向孔211的另一端设置有与第一锁止结构121相匹配的第二锁止结构3,连接杆12被配置为能够沿锥形导向孔211伸入卡接凹槽21a内部,并通过第一锁止结构121与第二锁止结构3相配合,以与第二安装体21锁止固定。
38.在本发明实施例中,通过将第一连接部1安装设置在一艘无人艇的船艏部,将第二连接部2安装设置在另一艘无人艇的船艉部,完成对无人艇连接器的安装。在需要进行两艘无人艇的海上对接工作时,首先通过控制安装有第一连接部1的无人艇的船艏部靠近安装有第二连接部2的另一艘无人艇的船艉部。之后控制连接杆12由第一安装体11的安装槽111中伸出,直到与第二安装体21上的锥形面导向板21b相接触。之后通过安装有第一连接部1的无人艇本身的前进速度使两艘无人艇进一步靠近,此时连接杆12的另一端即会在锥形导向孔211的孔壁导向下由接触点逐渐滑入到锥形导向孔211孔径较小的另一端,并最终进入到第二安装体21的卡接凹槽21a中。进入卡接凹槽21a中的连接杆12即会通过第一锁止结构121与设置于锥形导向孔211的另一端的第二锁止结构3相配合,实现连接杆12与第二安装体21的锁止固定,保证连接杆12的另一端不会由卡接凹槽21a中脱离,从而完成两艘无人艇的海上对接。采用该连接器机构进行无人艇的对接,结构简单,仅需要两艘无人艇在水面上进行船艏与船艉的初步对正,使连接杆12伸出第一安装体11的一端能够和第二安装体21上的锥形面导向板21b相接触,即可通过锥形导向孔211实现连接杆12的滑动引导并完成锁紧对接。大幅降低了两艘无人艇之间的对接精度要求,能够有效提高无人艇在风浪影响下的对接成功率。
39.可选地,第一锁止结构121为限位块,限位块具有圆形限位面1211,连接杆12的另一端与与圆形限位面1211垂直连接,连接杆12与圆形限位面1211同轴,连接杆12的直径小于圆形限位面1211的直径。
40.第二锁止结构3包括两个楔形锁扣装置31,两个楔形锁扣装置31相对于锥形导向孔211的直径对称布置,楔形锁扣装置31包括楔形块311和驱动装置312,楔形块311包括依次连接的第一端面3111、第二端面3112、第三端面3113和第四端面3114,第一端面3111设置
有转轴32且通过转轴32与锥形导向孔211的另一端铰接,转轴32平行于卡接凹槽21a的底壁且垂直于锥形导向孔211的轴线,第二端面3112与第四端面3114呈锐角布置且在向锥形导向孔211的另一端靠近的方向上间距逐渐减小,驱动装置312安装在卡接凹槽21a内部且与转轴32传动连接,第二锁止结构3被配置为当楔形块311的第三端面3113平行于卡接凹槽21a的底壁时,两个楔形锁扣装置31中楔形块311的第二端面3112与第三端面3113的连接处的间距与连接杆12的直径相等。
41.示例性地,在本发明实施例中,两个楔形锁扣装置31在处于初始状态时,两个楔形块311的第三端面3113均平行于卡接凹槽21a的底壁,也即是两个楔形锁扣装置中楔形块311的第二端面3112与第三端面3113的连接处的间距处于与连接杆12的直径相等。当位于连接杆12另一端的第一锁止结构121,也即是限位块在锥形导向孔211的锥形孔壁导向下滑入到锥形导向孔211孔径较小的另一端时,会优先与两个楔形锁扣装置31的楔形块311的第二端面3112相接触,由于限位块的圆形限位面1211整体直径大于连接杆12,限位块会在向卡接凹槽21a中滑动的过程中推动两个楔形块311绕转轴32向相反的方向旋转以让出空间。当限位块完全进入卡接凹槽21a后,通过驱动装置312驱动转轴32带动两个楔形块311向相向的方向旋转复位,使两个楔形块311的第三端面3113重新旋转到平行于卡接凹槽21a的底壁。此时若限位块由脱出锥形导向孔211的趋势,其圆形限位面1211会与两个楔形块311的第三端面3113相抵接而避免脱出。而在需要解除两艘无人艇的对接时,通过驱动装置312驱动转轴32带动两个楔形块311再次向相反的方向旋转以让出空间,使两个楔形块311的第二端面3112与第三端面3113的连接处的间距大于圆形限位面1211的直径,连接杆12即可由锥形导向孔211重新脱出卡接凹槽21a,完成对接的解除。结构简单,控制方便,提高了两艘无人艇之间对接与解除对接的效率。
42.可选地,锥形导向孔211的另一端设置有多组第二锁止结构3,多组第二锁止结构3沿锥形导向孔211的周向等角度间隔布置。示例性地,在本发明实施例中,锥形导向孔211的另一端设置有两组第二锁止结构3,也即是一共四个楔形锁扣装置31沿锥形导向孔211的周向呈90
°
间隔布置。通过设置多组第二锁止结构3,能够提高楔形块311的第三端面3113与限位块的圆形限位面1211的抵接面数量,也即是第一锁止结构121与第二锁止结构3之间的配合接触面,进而提高连接杆12与第二安装体21的锁止固定的紧固度,提高无人艇之间的对接稳定性。
43.可选地,连接器机构还包括环形弹簧33,第四端面3114上设置有两个限位挡板3115,两个限位挡板3115与第四端面3114垂直连接,且沿锥形导向孔211的轴线方向间隔布置,环形弹簧33环绕第二锁止结构3设置且绕接在楔形块311的第四端面3114上,环形弹簧33位于两个限位挡板3115之间。示例性地,在本发明实施例中,通过在多个楔形块311的第四端面3114上环绕套接一环形弹簧33,并通过第四端面3114上的两个限位挡板3115形成的限位槽对环形弹簧33进行限位固定,防止环形弹簧33在锥形导向孔211的轴线方向上滑动。限位块在向卡接凹槽21a中滑动的过程中推动两个楔形块311绕转轴32向相反的方向旋转时,环形弹簧33会跟随第四端面3114张开而处于拉伸状态。而当限位块完全进入卡接凹槽21a后,每组第二锁止结构3中的两个楔形块311则会在环形弹簧33还原至正常状态的弹性恢复力作用下向相向的方向旋转复位,使两个楔形块311的第三端面3113重新旋转到平行于卡接凹槽21a的底壁。通过设置环形弹簧33可以实现第二锁止结构3在连接杆12进入卡接
凹槽21a之后的自动复位实现配合锁定,无需通过驱动装置312进行驱动,能够节省能源,提高连接器机构的实用性。
44.可选地,第一端面3111上凸出设置有第一限位凸块34,第一限位凸块34包括相反的第一侧面341和第二侧面342,第一侧面341与第四端面3114连接,第二侧面342与第一端面3111垂直连接,转轴32设置在第一限位凸块34上。连接器机构还包括固定块35,固定块35连接在锥形导向孔211的另一端,固定块35具有平行于卡接凹槽21a的底壁的第五端面351,第五端面351上凸出设置有第二限位凸块352,第二限位凸块352包括相互连接的第三侧面3521和第四侧面3522,第三侧面3521平行于第五端面351,第四侧面3522与第五端面351垂直连接,第二锁止结构3被配置为当楔形块311的第三端面3113平行于卡接凹槽21a的底壁时,第三侧面3521与第一端面3111相抵接,第二侧面342与第四侧面3522相抵接。示例性地,在本发明实施例中,在限位块完全进入卡接凹槽21a后,每组第二锁止结构3中的两个楔形块311在环形弹簧33还原至正常状态的弹性恢复力作用下向相向的方向旋转复位时,第一限位凸块34上的第二侧面342会与第二限位凸块352上的第四侧面3522相抵接,同时第二限位凸块352上的第三侧面3521会与楔形块311的第一端面3111相抵接,使楔形块311能够稳定停留在初始位置,避免旋转过度。使第一锁止结构121与第二锁止结构3能够配合稳定,进一步提高了无人艇之间的对接稳定性。
45.可选地,限位块的圆形限位面1211背向连接杆12的一侧呈半球形,卡接凹槽21a的底壁上具有与限位块相匹配的圆弧凹槽212。示例性地,在本发明实施例中,第一锁止结构121,也即是限位块在跟随连接杆12的另一端进入到卡接凹槽21a内后,其呈半球形的一侧会对应卡接到卡接凹槽21a的底壁上的圆弧凹槽212中实现配合连接。圆弧凹槽212可以在平行于卡接凹槽21a的底壁的方向上对限位块进行限位固定,防止其相对于卡接凹槽21a发生相对晃动,进一步提高了无人艇之间的对接稳定性。
46.可选地,连接杆12的一端设置有滑动齿轮122,安装槽111的内壁上具有与滑动齿轮122相匹配的齿条1111,齿条1111沿安装槽111的长度方向布置,滑动齿轮与齿条1111相啮合。示例性地,在本发明实施例中,通过将连接杆12与安装槽111设置为齿轮齿条配合连接的形式,操作人员可以通过内置电机等驱动装置驱动带有滑动齿轮122的连接杆12基于实际需求进行精准收放,方便控制连接杆12伸出安装槽111的长度,保证与第二安装体21之间的精准配合连接,进一步提高了无人艇之间的对接稳定性。
47.可选地,连接杆12包括第一杆体12a和第二杆体12b,滑动齿轮122设置于第二杆体12b的一端,第二杆体12b的另一端与第一杆体12a通过万向节4连接。示例性地,在本发明实施例中,通过将连接杆12设置为通过万向节4连接的分体结构,可以在实现在两艘无人艇的对接后释放两艇之间的相对自由度,降低连接器结构的载荷,提高使用寿命。
48.可选地,连接器机构还包括套筒5,套筒5的内壁上具有内螺纹,第一杆体12a和第二杆体12b中至少一个的侧壁上具有与套筒5相匹配的外螺纹,套筒5套接在第一杆体12a和/或第二杆体12b上并覆盖万向节4。示例性地,在本发明实施例中,在尚未完成连接杆12与第二安装体21的锁止固定时,可以通过旋动套筒5,沿第一杆体12a和/或第二杆体12b的长度方向调整套筒5在连接杆12上的相对位置,使套筒5套接覆盖在万向节4的外部,避免在完成对接前第一杆体12a与第二杆体12b发生相对晃动,提高对接效率。而在完成对接后,通过再次旋动套筒5将万向节4外露以释放两艇之间的相对自由度,结构简单,调节方便,进一
步提高了连接器机构的实用性。
49.可选地,第一安装体11、连接杆12和第二安装体21均为不锈钢结构件。示例性地,在本发明实施例中,第一安装体11、连接杆12和第二安装体21均采用不锈钢材料制成,具有良好的韧性、耐热性,材质均匀,机械强度高。可以有效提高连接器机构的连接稳定性的使用寿命。
50.除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则所述相对位置关系也可能相应地改变。
51.以上所述仅为本发明的可选实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。