1.本发明涉及一种大频偏高动态扩频信号的捕获领域,更具体地说,它涉及一种扩频信号的实时捕获方法、系统及介质。
背景技术:
2.卫星通信系统由于在与地面终端或基站之间的信号传输过程中存在传输时延、信道衰落、多径效应、多普勒频偏等问题,其接收信噪比会大幅降低,要想获得高可靠的通信保障,必须削弱信号衰减对接收带来的影响。扩频通信技术正是针对低信噪比条件下的可靠通信需求而设计的通信信号体制,因其具有可靠的数据传输性能和良好的抗干扰性能,常被用于卫星通信系统中。
3.目前,扩频码同步捕获方法主要有滑动相关法、序列匹配滤波法、发射参考信号法、突发同步法等。其中,滑动相关法包括时域相关法和频域相关法,时域滑动相关法方法相对简单,但是简单的时域滑动在大频偏条件下的需要非常长的数据才能获取较高的相关增益,然而一般卫星通信信号用于同步捕获的数据长度一定,因此该方法的适用条件有限;频域相关一般采用并行的方式能够较快的完成相关捕获,但是硬件资源消耗大。现有技术中提出了基于时/频二维同步相关捕获方法,该方法只有在码相位完全对齐并且多普勒频移补偿后残余频偏最小时才有输出最大值,捕获搜索时效性差,很显然,只有当对频率估计值有先验信息时,能够适当减少捕获时间,且算法复杂程度高,尤其在实现时很难或者需要较高的代价才能实现实时捕获。序列匹配滤波法可以实现快速捕获,但是在低轨卫星通信应用场景下,抗多普勒性能较差,且实现复杂度较时域滑动相关高。发射参考信号和突发同步法都是借助独立同步信号或特殊码字辅助完成卫星信号的捕获同步,适用范围有限。
4.综上所述,目前扩频信号的捕获技术虽然已经取得了一定的研究成果,但是面向大频偏高动态的低轨卫星通信应用场景,并未满足高动态适应性、低资源消耗的实时捕获需求。
技术实现要素:
5.本发明的目的是提供一种扩频信号的实时捕获方法、系统及介质,解决现有时域滑动相关捕获技术在大频偏条件下相关捕获增益较低的问题,本发明采用部分相关的方式,同时增加多路链路捕获策略,通过一定的资源消耗平衡,在确保信号相关捕获性能的同时,提升捕获的时效性,最终实现大频偏范围内对扩频信号的扩频码的同步捕获。
6.本发明的上述技术目的是通过以下技术方案得以实现的:
7.第一方面,提供了一种扩频信号的实时捕获方法,包括以下步骤:
8.对接收信号进行倍数抽取处理,获得多路具有单符号速率的样点信号;
9.将每路样点信号与本地序列进行分段累积滑动相关运算处理,获得本次滑动处理后多路所述样点信号的多路相关峰值;
10.根据多路所述相关峰值实时调整捕获门限,判断多路所述相关峰值是否大于捕获
门限,获得多路捕获标识,并通过多路捕获判决策略对多路捕获标识进行判决,若满足则判决本次捕获成功,否则判决本次捕获失败,继续进行相关运算处理,直至满足所述多路捕获判决策略或者滑动步进完成为止;
11.对满足多路捕获判决策略的多路所述相关峰值进行码同步位置处理,确定接收信号与本地序列对齐的位置信息。
12.与现有技术相较而言,本发明针对大频偏高动态应用场景,提出一套完整的扩频体制信号的实时捕获方案,结合分段累积符号同步方法和多路捕获判决策略,通过一定的资源消耗平衡,在确保信号相关捕获性能的同时,提升捕获的时效性,最终实现大频偏范围内对扩频信号的扩频码元同步捕获。
13.进一步的,将每路所述样点信号均分为若干段的信号数据,每段信号数据的数据长度相等;
14.获取与每段信号数据的数据长度相等的本地序列,根据每段所述信号数据和本地序列进行相关运算得到多个第一相关值;
15.对所述本地序列取反,将取反后的本地序列与每段所述信号数据进行相关运算得到多个第二相关值;
16.对多个所述第一相关值与多个所述第二相关值作差,若差值大于零,则输出第一相关值,反之则输出第二相关值;
17.将对应输出的相关值进行累加处理,获得单路所述样点信号的相关峰值,其计算式为:其中,yj表示比较后的相关值,n表示将每路所述样点信号均分的段数。
18.进一步的,捕获门限采用自适应门限更新方法,其计算式为:其中,α表示门限系数,k表示滑动相关运算的次数,x
corr_lp
表示相关峰值;
19.当所述相关峰值大于捕获门限时,获得第k次滑动第p路的捕获标识为:其中,1表示捕获成功,0表示捕获失败,λ
corr_kp
表示捕获门限,x
corr_kp
表示每一路样点信号所对应的相关峰值。
20.进一步的,设定捕获判决策略的阈值为z,当且仅当多路样点信号中有z路的相关峰值同时大于捕获门限时,判决相关处理的位置为最大相关位置,即捕获成功,否则捕获失败,继续对每路样点信号的信号数据进行滑动步进为1个采样点的滑动处理,直至满足捕获判决条件或者滑动步进完成为止;
21.第k次滑动的捕获标识的计算式为:其中,z表示捕获
判决策略的阈值。
22.进一步的,获取满足捕获判决策略的相邻两次滑动的相关峰值,寄存器中峰值为第k次相关峰值和第k-1次的相关峰值,对相邻两次捕获的相关峰值进行比较,获得两个相关峰值中最大的相关峰值的第一位置信息phy_start1;
23.根据所述位置信息phy_start1和k次滑动次数计算接收信号与本地序列对齐的第一位置。
24.进一步的,计算接收信号与本地序列对齐的第一位置的计算式为:toa1=(k-2)
×
p phy_start1,其中,k表示滑动次数,p表示倍数抽取处理时所抽取的倍数,phy_start1表示两个相关峰值中最大的相关峰值的位置信息。
25.进一步的,若第k次捕获成功,则最大的相关值在第k次和第k 1次相关峰之间,则在寄存器中保留第k-2次、第k-1次和第k次相邻3次滑动的相关峰值;
26.比较第k-2次和第k-1次的2p个相关值,判断最大的p个相关值的第一位置信息phy_start1,若phy_start1《p,则接收信号与本地序列对齐的位置为所述第一位置;
27.若phy_start1=p,则比较第k-1次和第k次的2p个相关值,判断最大的p个相关值的第二位置信息phy_start2,根据所述第一位置信息phy_start1、第二位置信息phy_start2和k次滑动次数计算接收信号与本地序列对齐的第二位置。
28.进一步的,则接收信号与本地序列对齐的第二位置的计算式为:toa2=(k-3)
×
p phy_start1 phy_start
2-1,其中,k表示滑动次数,p表示倍数抽取处理时所抽取的倍数,phy_start1表示第k-2次和第k-1次两个相关峰值中最大的相关峰值的第一位置信息,phy_start2表示第k-1次和第k次两个相关峰值中最大的相关峰值的第二位置信息。
29.第二方面,提供了一种扩频信号的实时捕获系统,包括:
30.抽取单元,用于对接收信号进行倍数抽取处理,获得多路具有单符号速率的样点信号;
31.分段运算单元,用于将每路样点信号与本地序列进行分段累积滑动相关运算处理,获得本次滑动处理后多路所述样点信号的多路相关峰值;
32.捕获单元,用于根据多路所述相关峰值实时调整捕获门限,判断多路所述相关峰值是否大于捕获门限,获得多路捕获标识,并通过多路捕获判决策略对多路捕获标识进行判决,若满足则判决本次捕获成功,否则判决本次捕获失败,继续进行相关运算处理,直至满足所述多路捕获判决策略或者滑动步进完成为止;
33.同步单元,用于对满足多路捕获判决策略的多路所述相关峰值进行码同步位置处理,确定接收信号与本地序列对齐的位置信息。
34.第三方面,提供了一种计算机可读存储介质,用于存储计算机可读取的指令,所述指令被执行时执行第一方面所述的一种扩频信号的实时捕获方法的操作。
35.与现有技术相比,本发明具有以下有益效果:
36.1.主要针对大频偏高动态的扩频信号这一应用场景,提出一套完整的扩频体制信号的实时捕获方法,结合分段累积符号同步方法和多路捕获判决策略,通过一定的资源消耗平衡,在确保信号相关捕获性能的同时,提升捕获的时效性,最终实现大频偏范围内对扩频信号的扩频码元同步捕获。
37.2.使用分段累积时域相关的方法,避免频偏对信号相位带来的翻转影响,提升大
频偏条件下的相关捕获增益。具体实现时,时域符号相关避免了复乘运算,降低了实现复杂度,通过实现框架的整体考虑,可达成较低复杂度的实时捕获目标。
38.3.引入多路捕获判决策略,较单符号速率捕获方案,避免数据质量较差的单路捕获带来的漏检问题,提升捕获概率;且多路捕获判决时,只有多路同时满足捕获条件时才会判定捕获成功,能够在一定程度上降低捕获虚警率。
39.4.基于多路捕获判决策略,考虑捕获成功时的当次滑动与扩频码符号同步位置之间的关系,由扩频码元同步位置给出符号同步的计算公式,为基于插值的最佳采样点确定等提供同步位置的先验信息。
附图说明
40.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
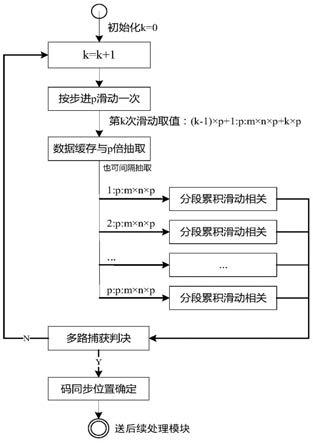
41.图1为本发明一实施例提供的扩频信号的实时捕获方法具体实施流程;
42.图2为本发明一实施例提供的滑动相关窗口大小和滑动步进示意图;
43.图3为本发明一实施例提供的分段累积滑动相关流程图;
44.图4为本发明一实施例提供的多路联合捕获判决流程图;
45.图5为本发明一实施例提供的符号同步位置确定流程图;
46.图6为本发明一实施例提供的捕获系统的结构框图。
具体实施方式
47.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
48.需说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多路该特征。在本发明的描述中,“多路”的含义是两路或两路以上,除非另有明确具体的限定。
49.现有时域滑动相关法方法相对简单,一般采用两种方式进行时域滑动相关处理。第一种方式是,对本地序列按照信号数据符号样点数进行重复,重复后的本地序列与信号数据长度一致,然后将本地序列与信号数据长度进行相关处理,得到的相关峰值最大值所在的位置为输出的同步位置。这种方式在大频偏条件下需要非常长的数据才能获取较高的相关增益,在实际应用中,用于捕获的信号导频头的数据长度有限,因此该种方法适应性不强;此外,得到的同步位置一般是一个码片的大致中间位置,若一个码片中包含奇数个符号,还可以推断出与本地序列同步的信号起始采样点位置;但是当一个码片中包含偶数个符号,那么很难界定起始采样点的具体位置。第二种方式是,对接收到的信号数据进行单符号速率抽取,随机选择一路进行相关处里,此种方法同样存在大频偏条件下的适应问题,且无法确定与本地序列同步的信号起始采样点位置。
50.首先介绍一下本技术的应用场景,主要是针对大频偏高动态的扩频信号,也可以应用在低频偏和低动态的扩频信号,也可以是低轨卫星通信系统的扩频体制信号,都可以
应用本技术完成信号的发现(如捕获、检测等),还可用于相关性较好的其它类型序列的发现。目前的时域滑动相关捕获技术在大频偏条件下相关捕获增益较低的问题。因此,本技术实施例提供一种扩频信号的实时捕获方法,本方法采用部分相关的方式,同时增加多路链路捕获策略,通过一定的资源消耗平衡,在确保信号相关捕获性能的同时,提升捕获的时效性,最终实现大频偏高动态范围内对扩频体制卫星信号的扩频码元的同步捕获。
51.实施例一:
52.如图1所示,本技术实施例一提供了一种扩频信号的实时捕获方法,包括以下步骤:
53.对接收信号进行倍数抽取处理,获得多路具有单符号速率的样点信号;
54.将每路样点信号与本地序列进行分段累积滑动相关运算处理,获得本次滑动处理后多路样点信号的多路相关峰值;
55.根据多路相关峰值实时调整捕获门限,判断多路所述相关峰值是否大于捕获门限,获得多路捕获标识,并通过多路捕获判决策略对多路捕获标识进行判决,若满足则判决本次捕获成功,否则判决本次捕获失败,继续进行相关运算处理,直至满足多路捕获判决策略或者滑动步进完成为止;
56.对满足多路捕获判决策略的多路相关峰值进行码同步位置处理,确定接收信号与本地序列对齐的位置信息。
57.具体的,如图1所示,是一种扩频信号的实时捕获方法的实施流程。首先,对接收信号进行倍数抽取,获取多路单符号速率的样点信号;其次,针对每路信号数据,进行分段累积滑动相关,即将相关的信号数据和本地序列进行相同的分段处理,得到相关峰值;然后,针对每一段的信号数据与本地序列,采用反转相关比较的方法获取本段相关值输出,将所有段的输出相关值进行累加,得到各路数据本次滑动的相关峰值。
58.再利用每次滑动的相关峰值实时调整捕获门限,并通过多路捕获判决策略,判决本次滑动的位置是否为相关最大位置,若满足捕获判决条件,则认为捕获成功;否则,判断为本次捕获失败,需要继续滑动。最后,当滑动到满足捕获判决条件时,进行扩频码符号同步位置判决,确定抽取前多符号速率信号数据与本地序列对齐的位置。
59.如图3所示,本技术实施例一的又一实施例中,将每路所述样点信号均分为若干段的信号数据,每段信号数据的数据长度相等;
60.获取与每段信号数据的数据长度相等的本地序列,根据每段信号数据和本地序列进行相关运算得到多个第一相关值;
61.对本地序列取反,将取反后的本地序列与每段信号数据进行相关运算得到多个第二相关值;
62.对多个第一相关值与多个第二相关值作差,若差值大于零,则输出第一相关值,反之则输出第二相关值;
63.将对应输出的相关值进行累加处理,获得单路所述样点信号的相关峰值,其计算式为:其中,yj表示比较后的相关值,n表示将每路样点信号均分的段数。
64.具体的,对接收信号进行倍数抽取,获取p路单符号速率的样点信号,需要说明的是,倍数抽取多少倍,即可相应的获得多少路具备单符号速率的样点信号,各路样点信号的
数据编号为p,则有{p,1≤p≤p}。如图2所示,针对每路信号,控制滑动一次,即进行一次滑动步进为1个采样点的定长信号数据的相关捕获处理。这里做个假设,假设每次滑动单路信号数据长度为n,则第k次滑动第p路数据为d
kp
={data1,
…
,datai,
…
,datan},取n长的本地序列为seq={s1,
…
,si,
…
,sn},其中,1≤i≤n,si∈{-1,1}。初始化滑动标识k=1,首次处理的数据序号p=1。
65.针对第k次滑动第p路数据,进行分段累积滑动相关。分段累积相关选择的基础数据是单符号速率的样点信号数据,本地序列为已知的扩频码序列。如图3所示,为分段累积相关的实施流程示意图。
66.首先,将信号数据和本地序列进行相同的分段处理,假设将长度为n的单路数据均分为n段,每段数据长度为m,则有n=m
×
n。分段后数据长度分别为d
kp
={d1,
…
,dj…
,dn},其中,1≤j≤n,dj表示第j段长度为m的数据,dj中的数据编号为:(m-1)
×
j 1:m
×
j。同理,分段获取得到第j段长度为m的本地序列为seqj。这里需要说明的是,请参考图3,将一路数据长度为n的样点信号数据拆分成为n段,每段的数据长度为m,由于每段的数据都需要与本地序列进行相关运算,则需要与n段对应的j段的本地序列,然后依次做相关运算,得出多个相关值。
67.然后,针对每一段的信号数据dj与本地序列seqj,进行直接相关得到第一相关值y
j1
为:
[0068][0069]
对本地序列取反,将其与信号数据进行相关得到第二相关值y
j2
。将得到的两个相关值进行比较,较大的相关值yj送至相关累积运算器。
[0070]
最后,对每一段进行相同的相关运算,并将比较后的相关值{yj,1≤j≤n}进行累加,最终得到第k次滑动第p路数据的相关峰值为:各路样点信号的数据编号p=p 1,若p≤p,那么重复上述分段累积滑动相关处理的过程,直至p》p,由于每路样点信号都会对应一个相关峰值,因此最终会输出多路相关峰值,用于后续的捕获处理。
[0071]
使用分段累积时域相关的方法,避免频偏对信号相位带来的翻转影响,提升大频偏条件下的相关捕获增益。具体实现时,时域符号相关避免了复乘运算,降低了实现复杂度,通过实现框架的整体考虑,可达成较低复杂度的实时捕获目标。
[0072]
如图4所示,本技术实施例一的又一实施例中,捕获门限采用自适应门限更新方法,其计算式为:其中,α表示门限系数,k表示滑动相关运算的次数,x
corr_lp
表示相关峰值;
[0073]
当相关峰值大于捕获门限时,获得第k次滑动第p路的捕获标识为:其中,1表示捕获成功,0表示捕获失败,λ
corr_kp
表示捕获门限,x
corr_kp
表示相关峰值。
[0074]
具体的,请参考图4所示,将第k次滑动的全部p路分段累积滑动相关峰值{x
corr_kp
,
1≤p≤p}存储至相关缓存器(一般情况下,相关缓存器至少要存储相邻两次次滑动的多路相关峰值,即缓存器大小为2p),根据每次滑动的相关峰值,实时调整捕获门限,并结合多路捕获策略进行联合捕获判决,判决本次滑动的位置是否为相关最大位置,及捕获是否成功。
[0075]
捕获门限采用自适应门限更新方法,假设门限系数为α,那么第k次滑动第p路数据的捕获门限为:
[0076][0077]
当x
corr_kp
≥λ
corr_kp
时,表示该路捕获的相关峰大于捕获门限,即有第k次滑动第p路的捕获标识flag
kp
为:
[0078][0079]
本技术实施例一的又一实施例中,设定捕获判决策略的阈值为z,当且仅当多路样点信号中有z路的相关峰值同时大于捕获门限时,判决相关处理的位置为最大相关位置,即捕获成功,否则捕获失败,继续对每路样点信号的信号数据进行滑动步进为1个采样点的滑动处理,直至满足捕获判决条件或者滑动步进完成为止;
[0080]
第k次滑动的捕获标识的计算式为:其中,z表示捕获判决策略的阈值。
[0081]
具体的,设定多路联合捕获策略为:当且仅当全部p路中有z路相关峰值同时大于该路的捕获门限时,判决本次滑动的位置为相关最大位置,即捕获成功;否则认为捕获失败。即有第k次滑动的捕获标识flagk为:
[0082][0083]
捕获判决:根据上式,求解flagk,当flagk=1时,则认为捕获成功,进行确定抽取前多符号速率信号数据与本地序列对齐的位置;否则,继续对每路数据进行滑动步进为1个采样点滑动,一直到满足捕获判决条件或者滑动步进完成为止,即k=k 1,进行分段累积滑动相关处理。
[0084]
引入多路捕获判决策略,较单符号速率捕获方案,避免数据质量较差的单路捕获带来的漏检问题,提升捕获概率;且多路捕获判决时,只有多路同时满足捕获条件时才会判定捕获成功,能够在一定程度上降低捕获虚警率。
[0085]
如图5所示,本技术实施例一的又一实施例中,获取满足捕获判决策略的相邻两次滑动的相关峰值,寄存器中峰值为第k次相关峰值和第k-1次的相关峰值,对相邻两次捕获的相关峰值进行比较,获得两个相关峰值中最大的相关峰值的第一位置信息phy_start1;
[0086]
根据第一位置信息phy_start1和k次滑动次数计算接收信号与本地序列对齐的第一位置。
[0087]
具体的,假设第k次滑动获取的p路相关峰值满足捕获成功判决条件,此时相关峰寄存器中的本次(即第k次)的相关数据为第k-1次的相关数据为如图5所示,对相邻两次捕获的相关峰进行同路相关峰的比较判断,获取2p个相关值中最大的p个相关值的位置信息phy_start1,那么,phy_start1∈{1,2,
…
,p 1}。
[0088]
本技术实施例一的又一实施例中,计算接收信号与本地序列对齐的第一位置的计算式为:toa1=(k-2)
×
p phy_start1,其中,k表示滑动次数,p表示倍数抽取处理时所抽取的倍数,phy_start1表示两个相关峰值中最大的相关峰值的第一位置信息。
[0089]
具体的,在上述一个实施例中对相关峰中最大的相关值的第一位置信息phy_start1和k次的滑动,计算接收信号与扩频码元完全对齐的第一位置。
[0090]
本技术实施例一的又一实施例中,若第k次捕获成功,则最大的相关值在第k次和第k 1次相关峰之间,则在寄存器中保留第k-2次、第k-1次和第k次相邻3次滑动的相关峰值;
[0091]
比较第k-2次和第k-1次的2p个相关值,判断最大的p个相关值的第一位置信息phy_start1,若phy_start1《p,则接收信号与本地序列对齐的位置为所述第一位置;
[0092]
若phy_start1=p,则比较第k-1次和第k次的2p个相关值,判断最大的p个相关值的第二位置信息phy_start2,根据第一位置信息phy_start1、第二位置信息phy_start2和k次滑动次数计算接收信号与本地序列对齐的第二位置。
[0093]
具体的,在实际应用过程中,存在第k次捕获成功,但是其最大的p个相关值可能在第k次和k 1次相关峰之间。因此,一般会利用捕获相关峰寄存器保留相邻3次滑动的相关峰值,对应的是第k-2、第k-1和第k次的相关峰值。此时,每次滑动首先要比较第k-2次和第k-1次的2p个相关值,判断最大的p个相关值的第一位置信息phy_start1;如果phy_start1<p,那么,接收信号与扩频码元完全对齐的第一位置为即为上述的toa1;如果phy_start1=p,那么,比较第k-1次和第k次的2p个相关值,判断最大的p个相关值的第二位置信息phy_star2,根据两个位置信息和k次滑动步进计算接收信号与扩频码元完全对齐的第二位置。
[0094]
基于上述实施例中的多路捕获策略,考虑捕获成功时的滑动与符号同步位置之间的关系,由码元同步位置给出符号同步的计算公式,可为基于插值的最佳采样点确定等提供同步位置的先验信息。
[0095]
本技术实施例一的又一实施例中,则接收信号与本地序列对齐的第二位置的计算式为:toa2=(k-3)
×
p phy_start1 phy_start
2-1,其中,k表示滑动次数,p表示倍数抽取处理时所抽取的倍数,phy_start1表示第k-2次和第k-1次两个相关峰值中最大的相关峰值的第一位置信息,phy_start2表示第k-1次和第k次两个相关峰值中最大的相关峰值的第二位置信息。
[0096]
具体的,需要说明的是本地序列等同于已知的扩频码序列,通过该计算式计算接收信号与本地序列对齐的第二位置。
[0097]
综合上述技术方案,本技术实施例一提供的实时捕获方法,结合分段累积符号同步方法和多路捕获判决策略,在确保信号相关捕获性能的同时,能够适应大频偏卫星通信
等应用场景,且能够确定与多符号速率的信号起始采样点位置,为后续处理做数据支持。首先,引入多路捕获判决策略,较单符号速率捕获方案,避免数据质量较差的单路捕获带来的漏检问题,提升捕获概率;且多路捕获判决时,只有多路同时满足捕获条件时才会判定捕获成功,能够在一定程度上降低捕获虚警率。其次,使用分段累积时域相关的方法,避免频偏对信号相位带来的翻转影响,提升大频偏条件下的相关捕获增益。最后,基于多路捕获策略,考虑捕获成功时的当次滑动与符号同步位置之间的关系,由码元同步位置给出符号同步的计算公式,为基于插值的最佳采样点确定等提供同步位置的先验信息。
[0098]
本技术实施例一还提供了两种不同的信号调制方式下的实施案例,分别是bpsk调制方式和qpsk调制方式。
[0099]
假设发送系统扩频信号采用bpsk调制方式,扩频码速率为rc=40mbps,扩频码长l=4096,信号由于卫星运动带来的多普勒频偏变化范围为:-800khz~800khz,接收系统采样率fs=160mhz。
[0100]
首先,对接收到的信号进行下变频处理,对基带信号进行4倍抽取,获取4路单符号速率的样点信号数据,并分别对4路信号做分段累积滑动相关。针对每一路信号,累积相关的信号总点数n=720,分段段数n=60,每段数据长度为m=12,将本地序列和翻转后的本地序列分别进行分段,并与分段后的信号数据进行相关,通过比较获取该路相关值输出。
[0101]
然后,设置门限系数α=2.2,利用各路的相关峰值自适应调整捕获门限,并将各路数据本次滑动的相关峰值与各路的捕获门限进行比较,判断是否超过门限,并给出各路的捕获标识。设置捕获策略参数z=3,即4路中3路同时满足捕获门限才判定捕获成功。将各路的捕获标识累加,获取当次滑动的捕获标识,若捕获成功,那么,可以进行符号同步位置确定;否则,利用滑动控制模块继续下一次的滑动。
[0102]
最后,设置相关峰值寄存器位数为12,考虑到实际应用的情况,这里的相关峰存储为相邻三次步进滑动的捕获相关峰,即存储相邻3次的捕获相关峰。当滑动到满足捕获判决条件时,确定抽取前多符号速率信号数据与本地序列对齐的位置。
[0103]
假设发送系统扩频信号采用qpsk调制方式,扩频码速率为rc=40mbps,扩频码长l=4096,信号由于卫星运动带来的多普勒频偏变化范围为:-800khz~800khz,接收系统采样率fs=160mhz。
[0104]
首先,对接收到的信号进行下变频处理,对基带信号进行4倍抽取,获取4路单符号速率的样点信号数据,并分别对4路信号做分段累积滑动相关。针对每一路信号,累积相关的信号总点数n=640,分段段数n=80,每段数据长度为m=8,将本地序列和翻转后的本地序列分别进行分段,并与分段后的信号数据进行相关,通过比较获取该路相关值输出。
[0105]
然后,设置门限系数α=2.4,利用各路的相关峰值自适应调整捕获门限,并将各路数据本次滑动的相关峰值与各路的捕获门限进行比较,判断是否超过门限,并给出各路的捕获标识。设置捕获策略参数z=3,即4路中3路同时满足捕获门限才判定捕获成功。将各路的捕获标识累加,获取当次滑动的捕获标识,若捕获成功,那么,可以进行符号同步位置确定;否则,利用滑动控制模块继续下一次的滑动。
[0106]
最后,设置相关峰值寄存器位数为12,考虑到实际应用的情况,这里的相关峰存储为相邻三次步进滑动的捕获相关峰,即存储相邻3次的捕获相关峰。当滑动到满足捕获判决条件时,确定抽取前多符号速率信号数据与本地序列对齐的位置。
[0107]
实施例二:
[0108]
如图6所示,本技术实施例二还提供了一种扩频信号的实时捕获系统,包括:
[0109]
抽取单元150,用于对接收信号进行倍数抽取处理,获得多路具有单符号速率的样点信号;
[0110]
分段运算单元160,用于将每路样点信号与本地序列进行分段累积滑动相关运算处理,获得本次滑动处理后多路所述样点信号的多路相关峰值;
[0111]
捕获单元170,用于根据多路相关峰值实时调整捕获门限,判断多路相关峰值是否大于捕获门限,获得多路捕获标识,并通过多路捕获判决策略对多路捕获标识进行判决,若满足则判决本次捕获成功,否则判决本次捕获失败,继续进行相关运算处理,直至满足多路捕获判决策略或者滑动步进完成为止;
[0112]
同步单元180,用于对满足捕获判决条件的多路相关峰值进行码同步位置处理,确定接收信号与本地序列对齐的位置信息。
[0113]
本技术实施例二的又一个实施例中,分段运算单元160,还用于将每路样点信号均分为若干段的信号数据,每段信号数据的数据长度相等;
[0114]
获取与每段信号数据的数据长度相等的本地序列,根据每段信号数据和本地序列进行相关运算得到多个第一相关值;
[0115]
对本地序列取反,将取反后的本地序列与每段信号数据进行相关运算得到多个第二相关值;
[0116]
对多个第一相关值与多个第二相关值作差,若差值大于零,则输出第一相关值,反之则输出第二相关值;
[0117]
将对应输出的相关值进行累加处理,获得单路样点信号的相关峰值,其计算式为:其中,yj表示比较后的相关值,n表示将每路所述样点信号均分的段数。
[0118]
系统还包括第一计算单元,用于捕获门限采用自适应门限更新方法,其计算式为:其中,α表示门限系数,k表示滑动相关运算的次数,x
corr_lp
表示相关峰值;
[0119]
当相关峰值大于捕获门限时,获得第k次滑动第p路的捕获标识为:其中,1表示捕获成功,0表示捕获失败,λ
corr_kp
表示捕获门限,x
corr_kp
表示相关峰值。
[0120]
系统还包括判决单元,用于设定捕获判决策略的阈值为z,当且仅当多路样点信号中有z路的相关峰值同时大于捕获门限时,判决相关处理的位置为最大相关位置,即捕获成功,否则捕获失败,继续对每路样点信号的信号数据进行滑动步进为1个采样点的滑动处理,直至满足捕获判决条件或者滑动步进完成为止;
[0121]
第k次滑动的捕获标识的计算式为:其中,z表示捕获判决策略的阈值。
[0122]
系统还包括第一同步单元,用于获取满足捕获判决策略的相邻两次滑动的相关峰值,寄存器中峰值为第k次相关峰值和第k-1次的相关峰值,对相邻两次捕获的相关峰值进行比较,获得两个相关峰值中最大的相关峰值的第一位置信息phy_start1;
[0123]
根据第一位置信息phy_start1和k次滑动次数计算接收信号与本地序列对齐的第一位置。
[0124]
系统还包括第一同步单元,还用于计算接收信号与本地序列对齐的第一位置的计算式为:toa1=(k-2)
×
p phy_start1,其中,k表示滑动次数,p表示倍数抽取处理时所抽取的倍数,phy_start1表示两个相关峰值中最大的相关峰值的第一位置信息。
[0125]
系统还包括第二同步单元,用于若第k次捕获成功,则最大的相关值在第k次和第k 1次相关峰之间,则在寄存器中保留第k-2次、第k-1次和第k次相邻3次滑动的相关峰值;
[0126]
比较第k-2次和第k-1次的2p个相关值,判断最大的p个相关值的第一位置信息phy_start1,若phy_start1《p,则接收信号与本地序列对齐的位置为所述第一位置;
[0127]
若phy_start1=p,则比较第k-1次和第k次的2p个相关值,判断最大的p个相关值的第二位置信息phy_start2,根据第一位置信息phy_start1、第二位置信息phy_start2和k次滑动次数计算接收信号与本地序列对齐的第二位置。
[0128]
第二同步单元,还用于则接收信号与本地序列对齐的第二位置的计算式为:toa2=(k-3)
×
p phy_start1 phy_start
2-1,其中,k表示滑动次数,p表示倍数抽取处理时所抽取的倍数,phy_start1表示第k-2次和第k-1次两个相关峰值中最大的相关峰值的第一位置信息,phy_start2表示第k-1次和第k次两个相关峰值中最大的相关峰值的第二位置信息。
[0129]
本实施例二中上述各程序单元所执行的方法可参照本发明实时捕获方法中各个实施例,此处不再叙述。
[0130]
实施例三:
[0131]
本技术实施例三还提供了一种计算机可读存储介质,计算机可读存储介质中存储有至少一条指令,该指令由处理器加载并执行时,使得计算机执行如上述实施例一中的方法所执行的操作。本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0132]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。