1.本发明涉及数字相控阵系统中波瓣自动化测试领域,更具体涉及一种宽带相控阵系统自动化波瓣测试与角度零值标校装置。
背景技术:
2.车载数字相控阵装备可用于雷达探测、飞行器测控等多个领域,具有机动性好,战时生存能力强等特点。鉴于此,目前航天测控装备正在发展车载数字相控阵多波束测控系统。
3.测控系统的主要功能之一是通过对卫星进行测距、测角实现卫星的测定轨。具体方法为:测控系统对卫星发送测量信号,获取卫星与测控站的径向距离。同时,测控系统通过测角技术获得卫星在测控系统阵面坐标系下的俯仰角、方位角。结合测控系统的站址信息、径向距离、测角结果可实现对卫星的定轨。可见,测角结果影响卫星测定轨的精度,因此在对卫星测角之前需要先实现角度零值的标校。
4.基于数字相控阵的机动测控系统在执行任务时,需根据任务要求机动到临时站址。这种临时站址,一般条件下无外部标校塔,这给机动测控系统精确测角带来了困难。
5.中国专利公开号cn111257883a,公开了一种相控阵天气雷达系统的标校装置及方法,装置包括:频率源组合模块,用于在预设周期内生成标校脉冲信号;天线阵面模块,用于实时接收相控阵天气雷达系统的回波信号及标校脉冲信号;信号处理模块,用于获取标校脉冲信号标准值,根据标校脉冲信号及标校脉冲信号标准值,得到回波标校信号补偿值;数字收发模块,用于接收回波标校信号补偿值,并根据回波标校信号补偿值对回波信号进行标校,得到标校后的回波信号。该专利申请相控阵天气雷达系统的标校装置及方法可以生成标校脉冲信号,根据标校脉冲信号及标校脉冲信号标准值,对相控阵天气雷达系统中所有通道接收的回波信号进行实时标校,提高了相控阵天气雷达系统探测的精准度。但是该专利申请并不涉及角度零值的标校。
6.综上,为充分发挥基于数字相控阵的机动测控系统效能,实现对卫星的精确测定轨和波瓣性能检测,需要设计一种无塔条件下的自动化波瓣测试与角度零值标校装置。
技术实现要素:
7.本发明所要解决的技术问题在于现有技术缺乏无塔条件下的自动化波瓣测试与角度零值标校装置。
8.本发明通过以下技术手段实现解决上述技术问题的:一种宽带相控阵系统自动化波瓣测试与角度零值标校装置,包括升降式标校杆、标校喇叭、数字化阵列天线及波瓣测试与角度零值标校装置,升降式标校杆上固定标校喇叭,数字化阵列天线的各单元与标校喇叭的相对位置固定,波瓣测试与角度零值标校装置分别与标校喇叭以及数字化阵列天线连接;所述波瓣测试与角度零值标校装置包括触发脉冲生成模块、标校信号生成模块、数据采集计算模块和波束指向控制模块,触发脉冲生成模块生成波位切换脉冲和频率切换脉冲,
并将波位切换脉冲、频率切换脉冲发送给标校信号生成模块和数据采集计算模块,将波位切换脉冲发送给波束指向控制模块,控制标校信号生成模块周期性的产生标校信号,通过标校喇叭扩散出去,控制波束指向控制模块完成不同波束指向角切换控制,控制数据采集计算模块完成标校信号采集,根据采集的标校信号,计算不同波位、不同频点的增益值,并根据增益值得到波瓣图和实际波束指向,从而得到角度零值。
9.本发明设置升降式标校杆,升降式标校杆上固定标校喇叭,数字化阵列天线的各单元与标校喇叭的相对位置固定,在面对临时站址时,无外部标校塔的时候,升降式标校杆充当外部标校塔,给机动测控系统精确测角带来了便利,同时触发脉冲生成模块控制标校信号生成模块周期性的产生标校信号,通过标校喇叭扩散出去,控制波束指向控制模块完成不同波束指向角切换控制,控制数据采集计算模块完成标校信号采集,根据采集的标校信号,计算不同波位、不同频点的增益值,并根据增益值得到波瓣图和实际波束指向,从而得到角度零值,解决无塔条件下的自动化波瓣测试与角度零值标校。
10.进一步地,所述升降式标校杆设置于牵引车车厢前端并且与车厢垂直,升降式标校杆顶端固定标校喇叭,牵引车的车厢与数字化阵列天线一体成型,波瓣测试与角度零值标校装置位于牵引车上。
11.进一步地,所述触发脉冲生成模块产生w个波位切换脉冲、w*n个频率切换脉冲分发给标校信号生成模块及数据采集计算模块,同时将w个波位切换脉冲分发给波束指向控制模块,波位切换脉冲的周期为tb,频率切换脉冲的周期为tf,tb=n*tf。
12.更进一步地,所述标校信号生成模块根据波位切换脉冲和频率切换脉冲生成频点fb的点频信号,具体频点为:
13.fb=f0 k*δf,n>k≥0
14.当标校信号生成模块收到第k 1个频率切换脉冲时,输出单点频信号fb=f0 (k 1)δf;当标校信号生成模块收到波位切换脉冲时,k=0,频率复位,输出点频信号fb=f0;标校信号生成模块输出的点频信号送给标校喇叭。
15.更进一步地,所述数据采集计算模块接收到第k个频率切换脉冲后,延迟tf/2,采集数字阵列天线送过来的宽带数字波束信号,并对宽带数字波束信号做n点fft,并对第k个点的fft值求模,并将该模值存入波位-频率-增益表。
16.更进一步地,所述波束指向控制模块根据标校喇叭在阵面坐标系下的俯仰角θ_0、方位角φ_0生成扫描波位θ∈[θ_0-pδθ,θ_0 (p-1)δθ],φ∈[φ_0-qδφ,φ_0 (q-1)δφ],共w=2p*2q个波位;波束指向控制模块每隔tb时间,向数字阵列天线发送一个波束指向角(θ,φ);波瓣扫描时先按方位向扫描,再按俯仰向扫描;波束指向控制模块接收波位切换脉冲,控制数字阵列天线在每个波位驻留时间tb。
[0017]
更进一步地,所述数据采集计算模块从波位-频率-增益表抽取得到宽带相控阵系统接收频段内所有频点的波位-增益表,据波位-增益表画出频点fb=f0 n*δf处的波瓣图;取中心频点处的波瓣图,寻找增益最大值对应的波位号b_max;设置δg=th,th≤12,从频点fb对应的波位-增益表中,找出所有增益值大于g(b_max,n)-δg的波位集合s:
[0018]
s={w|g(w,n)》g(b_max,n)-δg}
[0019]
从而得到波束指向角(θ_m,φ_m)=sum(s)/num(s),其中sum(s)表示对集合s中的元素求和,num(s)表示集合s中的元素个数,从而得到角度零值为:
[0020]
(θ_z,φ_z)=(θ_m,φ_m)-(θ_0,φ_0)。
[0021]
本发明的优点在于:本发明设置升降式标校杆,升降式标校杆上固定标校喇叭,数字化阵列天线的各单元与标校喇叭的相对位置固定,在面对临时站址时,无外部标校塔的时候,升降式标校杆充当外部标校塔,给机动测控系统精确测角带来了便利,同时触发脉冲生成模块控制标校信号生成模块周期性的产生标校信号,通过标校喇叭扩散出去,控制波束指向控制模块完成不同波束指向角切换控制,控制数据采集计算模块完成标校信号采集,根据采集的标校信号,计算不同波位、不同频点的增益值,并根据增益值得到波瓣图和实际波束指向,从而得到角度零值,解决无塔条件下的自动化波瓣测试与角度零值标校。
附图说明
[0022]
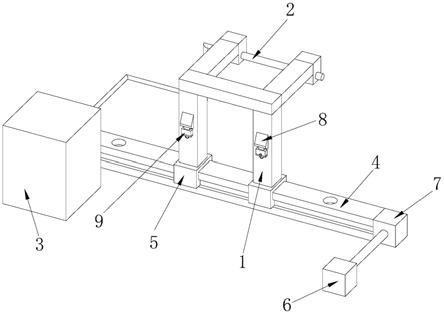
图1为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置的结构框图;
[0023]
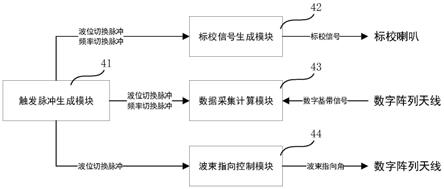
图2为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置中波瓣测试与角度零值标校装置的结构框图;
[0024]
图3为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置中波位切换脉冲与频率切换脉冲关系示意图;
[0025]
图4为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置中标校信号生成流程图;
[0026]
图5为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置中数据采集流程图;
[0027]
图6为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置的一个具体实施案例中fb=2.25ghz波瓣图;
[0028]
图7为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置的一个具体实施案例中集合s中各波位示意图;
[0029]
图8为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置的一个具体实施案例中fb=2.25ghz下缩小波瓣扫描间隔得到的波瓣图;
[0030]
图9为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置中的另一个具体实施案例中fb=2.25ghz波瓣图;
[0031]
图10为本发明实施例所公开的一种宽带相控阵系统自动化波瓣测试与角度零值标校装置中的另一个具体实施案例中集合s中各波位示意图。
具体实施方式
[0032]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0033]
如图1所示,一种宽带相控阵系统自动化波瓣测试与角度零值标校装置,包括升降式标校杆1、标校喇叭2、数字化阵列天线3及波瓣测试与角度零值标校装置4,升降式标校杆1上固定标校喇叭2,数字化阵列天线3的各单元与标校喇叭2的相对位置固定,波瓣测试与
角度零值标校装置4分别与标校喇叭2以及数字化阵列天线3连接;本实施例中,所述升降式标校杆1设置于牵引车5车厢前端并且与车厢垂直,升降式标校杆1顶端固定标校喇叭2,牵引车5的车厢与数字化阵列天线3一体成型,波瓣测试与角度零值标校装置4位于牵引车5上。
[0034]
如图2所示,所述波瓣测试与角度零值标校装置4包括触发脉冲生成模块41、标校信号生成模块42、数据采集计算模块43和波束指向控制模块44,触发脉冲生成模块41生成波位切换脉冲和频率切换脉冲,并将波位切换脉冲、频率切换脉冲发送给标校信号生成模块42和数据采集计算模块43,将波位切换脉冲发送给波束指向控制模块44,控制标校信号生成模块42周期性的产生标校信号,通过标校喇叭2扩散出去,控制波束指向控制模块44完成不同波束指向角切换控制,控制数据采集计算模块43完成标校信号采集,根据采集的标校信号,计算不同波位、不同频点的增益值,并根据增益值得到波瓣图和实际波束指向,从而得到角度零值。
[0035]
所述触发脉冲生成模块41产生波位切换脉冲w个、频率切换脉冲w*n个分发给标校信号生成模块42、数据采集计算模块43和波束指向控制模块44;波位切换脉冲的周期为tb,频率切换脉冲的周期为tf,tb=n*tf,波位切换脉冲和频率切换脉冲间的关系如附图3所示;
[0036]
所述标校信号生成模块42,根据波位切换脉冲和频率切换脉冲生成频点fb的点频信号,具体频点为:
[0037]
fb=f0 k*δf,n>k≥0
[0038]
当标校信号生成模块42收到第k 1个频率切换脉冲时,输出单点频信号fb=f0 (k 1)δf;当标校信号生成模块42收到波位切换脉冲时,k=0,即频率复位,输出频率fb=f0;标校信号生成模块42输出的点频信号送给标校喇叭2;标校信号生成模块42根据波位切换脉冲、频率切换脉冲产生标校点频信号的流程如附图4所示。
[0039]
所述数据采集计算模块43接收到第k个频率切换脉冲后,延迟tf/2,采集数字阵列天线送过来的宽带数字波束信号,并对宽带数字波束信号做n点fft,并对第k个点的fft值求模,并将该模值存入波位-频率-增益表,如表1所示;数据采集与计算模块工作流程如附图5所示。
[0040]
表1波位-频率-增益表
[0041][0042][0043]
所述波束指向控制模块44根据标校喇叭2在阵面坐标系下的俯仰角θ_0、方位角φ_0生成扫描波位θ∈[θ_0-pδθ,θ_0 (p-1)δθ],φ∈[φ_0-qδφ,φ_0 (q-1)δφ],共w=2p*2q个波位;波束指向控制模块44每隔tb时间,向数字阵列天线发送一个波束指向角(θ,φ),θ是在[θ_0-pδθ,θ_0 (p-1)δθ]区间内等间隔选取,φ是在[φ_0-qδφ,φ_0 (q-1)δφ]区间内等间隔选取;波瓣扫描时先按方位向扫描,再按俯仰向扫描;波束指向控
制模块44接收波位切换脉冲,控制数字阵列天线在每个波位驻留时间tb。
[0044]
所述数据采集计算模块43从波位-频率-增益表抽取得到宽带相控阵系统接收频段内所有频点波位-增益表,比如频点fb=f0 n*δf,n∈[0,n-1]处的波位-增益表如下表2所示。
[0045]
表2波位-增益表
[0046][0047][0048]
据此表可以画出频点fb=f0 n*δf处的波瓣图;取中心频点处的波瓣图,寻找增益最大值对应的波位号b_max;设置δg=th(th≤12),从频点fb对应的波位-增益表中,找出所有增益值大于g(b_max,n)-δg的波位集合s:
[0049]
s={w|g(w,n)》g(b_max,n)-δg}
[0050]
从而得到波束指向角(θ_m,φ_m)=sum(s)/num(s),其中sum(s)表示对集合s中的元素求和,num(s)表示集合s中的元素个数。从而得到角度零值为:
[0051]
θ_z,φ_z=(θ_m,φ_m)-(θ_0,φ_0)。
[0052]
以下给出一个具体仿真实例,某车载宽带数字阵列装备,接收工作在2.2~2.3ghz,数字化阵列天线3与牵引车5的车体方舱采用一体化共形设计,牵引车5上装置1台升降式标校杆1。装于升降式标校杆1顶部的标校喇叭2在阵面坐标系下的俯仰角θ0=32.31
°
、方位角φ0=5.76
°
。利用本发明所述的宽带相控阵系统自动化波瓣测试与角度零值标校装置进行宽带波瓣扫描。
[0053]
设p=q=16,即方位向和俯仰向分别扫描32个波位,俯仰向扫描间隔δθ=1.25
°
,方位向扫描间隔δφ=0.187
°
;f0=2.2ghz,δf=2mhz,n=25,利用本发明所述装置测得fb=2.25ghz波瓣图,如图6所示。
[0054]
从图6中可见,b_max=(32.31
°
,5.76
°
),g(b_max,fb)=24.97db。设置δg=9db,可从fb=2.25ghz的频率-波位-增益中得到集合s:
[0055]
s={w|g(w,2.25ghz)》24.97-9}
[0056]
集合s中各波位如图7所示。
[0057]
根据上述方案中所述方法,计算得到(θ_m,φ_m)=(32.30
°
,5.76
°
),得到角度零值(θ_z,φ_z)=(0.01
°
,0.00
°
),可见系统角度零值基本为0。
[0058]
为进一步观察θ0、φ0附近的主波瓣,可以进一步缩小波瓣扫描间隔δθ=0.1935,δφ=0.0645,扫描结果如图8所示,可以更加清楚的观察到主瓣附近情况。
[0059]
下面通过另一实施例来说明角度零值的标校方法。装于升降式标校杆1顶部的标校喇叭2在阵面坐标系下的俯仰角θ0=37.54
°
、方位角φ0=0.65
°
。设p=q=16,即方位向和俯仰向分别扫描32个波位,俯仰向扫描间隔δθ=0.97
°
,方位向扫描间隔δφ=1.23
°
。扫描结束后得到频率-波位-增益表,并根据表画出fb=2.25ghz的波瓣图如图9所示。
[0060]
从图8中可见,b_max=(43.54
°
,0.65
°
),g(b_max,fb)=32.41db。设置δg=9db,可从fb=2.25ghz的频率-波位-增益中得到集合s:
[0061]
s={w|g(w,2.25ghz)》32.41-9}
[0062]
集合s中各波位如图10所示。
[0063]
根据上述方案中所述方法,计算得到(θ_m,φ_m)=(43.36
°
,0.74
°
),得到角度零值(θ_z,φ_z)=(-5.82
°
,-0.09
°
),即波束的真正指向偏离(θ_z,φ_z)后才能使主瓣最大值对准喇叭。
[0064]
通过以上技术方案,本发明设置升降式标校杆1,升降式标校杆1上固定标校喇叭2,数字化阵列天线3的各单元与标校喇叭2的相对位置固定,在面对临时站址时,无外部标校塔的时候,升降式标校杆1充当外部标校塔,给机动测控系统精确测角带来了便利,同时触发脉冲生成模块41控制标校信号生成模块42周期性的产生标校信号,通过标校喇叭2扩散出去,控制波束指向控制模块44完成不同波束指向角切换控制,控制数据采集计算模块43完成标校信号采集,根据采集的标校信号,计算不同波位、不同频点的增益值,并根据增益值得到波瓣图和实际波束指向,从而得到角度零值,解决无塔条件下的自动化波瓣测试与角度零值标校。
[0065]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。