技术特征:
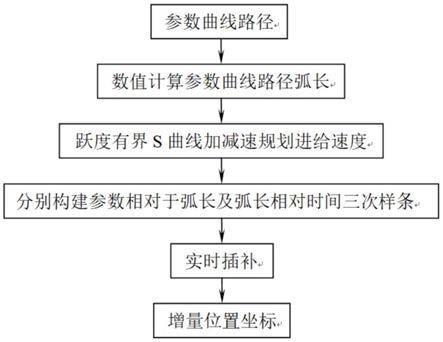
1.一种高精度参数路径插补方法,其特征在于,包括以下步骤:s1、基于参数曲线路径的曲率单调性,根据临界曲率值点、曲率极值点分割参数曲线路径,并求取各分段弧长;s2、采用跃度有界的s曲线加减速算法分别规划各分段速度;s3、基于各分段弧长和各分段速度,分别采用三次样条拟合得到弧长对时间样条及参数对弧长样条;s4、插补过程中,利用弧长对时间样条得到与实际进给步对应的弧长,再由参数对弧长样条得到对应的参数,从而计算插补的坐标增量。2.根据权利要求1所述的一种高精度参数路径插补方法,其特征在于,所述步骤s1中,采用数值计算方法求取弧长。3.根据权利要求2所述的一种高精度参数路径插补方法,其特征在于,参数区间[u
i
,u
i 1
]上一段平面参数曲线路径(x(u),y(u))的弧长计算公式为:对于参数区间[u
i
,u
i 1
],采用9点gauss-legendre积分公式,可得:其中,x为gauss-legendre积分公式的结点。4.根据权利要求3所述的一种高精度参数路径插补方法,其特征在于,采用自适应simpson方法计算弧长,包括:取ε为弧长精度指标,对参数区间[u
i
,u
i 1
]:首先,采用9点gauss-legendre公式数值计算其弧长l
i
;然后,二分积分区间[u
i
,u
i 1
]为及两个子区间,分别计算得各子区间上的曲线路径弧长l
k,i
及l
k,i 1
,k=1,2,
…
,为划分子区间序号;之后,计算l
i 1
=l
k,i
l
k,i 1
,并判别弧长差值|l
i-l
i 1
|是否小于ε;若是,则取l
i 1
为参数区间[u
i
,u
i 1
]上参数曲线路径的弧长,并记录与弧长l
k,i
及l
k,i 1
相对应的曲线参数点u
i
,u
i 1
;若否,则再次二分各子区间,分别求取再次划分后各子区间的弧长,然后继续判别差值,直至满足弧长精度指标;最后,对满足弧长精度指标的各子区间弧长与参数点,组成参数与弧长对序列。5.根据权利要求4所述的一种高精度参数路径插补方法,其特征在于,所述步骤s2,包括:考虑进给运动平稳性及机床的动力学性能,设置进给速度规划的约束条件:
其中,v
i
、a
ni
、a
ti
、j
ni
及j
ti
分别为i个插补周期的进给速度、法向加速度、切向加速度、法向跃度及切向跃度;v
max
、a
n
、a
t
、j
n
及j
t
分别为规划速度所能采用的最大进给速度、法向最大加速度、切向最大加速度、法向最大跃度及切向最大跃度;定义临界曲率值κ
cr
:其中,t
s
、δ分别为插补周期及弦高误差限;定义参数曲线上曲率超过临界曲率值的局部极大点为曲率临界点,刀具在曲率临界点位置的运动速度会显著受机床的动力学性能约束,计算曲率临界点的可行速度v
i
:其中,k
i
为曲率临界点的曲率;根据定义的临界曲率值,结合曲率k计算公式:确定参数曲线上与临界曲率值对应的参数点,其中,p
′
(u)和p
″
(u)分别为参数曲线的一阶和二阶导数;再根据曲率导数为零,计算得到曲率极值点;根据曲率单调性,用曲率极值点及临界曲率值点,将参数曲线路径划分为若干分段;根据计算出的弧长及曲率临界点的进给速度,采用s曲线加减速算法,规划临界曲率值点与曲率临界点之间弧段进给速度;对局部曲率极小点与临界曲率值点之间,则取局部曲率极小点速度为待求值v
i
,采用s曲线加减速算法确定与局部曲率极小点相邻的左右临界曲率值点的位移约束条件,规划局部沿着弧段进给的速度。6.根据权利要求5所述的一种高精度参数路径插补方法,其特征在于,所述步骤s3,包括:基于参数与弧长对(u
i
,l
i
),则有参数序列0=u0<
…
<u
i
<
…
<u
n
=1,弧长序列0=l0<
…
<l
i
<
…
<l
n
=l;则在参数区间u∈[0,1]构建参数对弧长的三次样条函数s
u
(l),弧长样条满足条件为:
(1)s
u
(l)在整个区间l∈[0,l]上具有二阶连续导数;(2)在每个小区间[l
i-1
,l
i
]上是u的三次多项式;i=1,2,
…
,n;(3)在节点l
i
处满足插值条件s
u
(l
i
)=u
i
;在样条内节点l1,l2,
…
,l
n-1
处,s
u
(l)满足3n-3个连续性条件:以及插值条件,则共有4n-2个条件,采用三次样条插值方法,插值得到区间[l
i-1
,l
i
]上三次样条插值函数s
ui
(l)。7.根据权利要求6所述的一种高精度参数路径插补方法,其特征在于,所述步骤s3,还包括:在规划参数曲线的进给速度时,得到规划时间与弧长对(t
i
,l
i
);根据时间与弧长对(t
i
,l
i
),构建弧长对时间三次样条s
l
(t)。8.根据权利要求7所述的一种高精度参数路径插补方法,其特征在于,所述步骤s4,包括:在实时插补时,根据插补时间步t
k
=kt
s
,将其代入弧长对时间三次样条s
l
(t),得到与实时插补步相对应的弧长l
k
,然后将弧长l
k
代入到参数对弧长三次样条s
u
(l),得到与弧长相对应的参数曲线路径参数u
k
,将u
k
代入到曲线方程,则得到相应的坐标(x
k
,y
k
),结合进给运动的当前位置,则得到补坐标增量:其中,n为速度规划总的离散时间步数,即插补整条参数曲线路径总的插补周期数。9.一种高精度参数路径插补系统,应用如权利要求1-8任一项所述的插补方法,其特征在于,所述插补系统包括:分割模块,用于基于参数曲线路径的曲率单调性,根据临界曲率值点、曲率极值点分割参数曲线路径;计算模块,用于求取参数曲线路径分割的各分段弧长;速度规划模块,用于采用跃度有界的s曲线加减速算法分别规划各分段速度;样条拟合模块,用于基于各分段弧长和各分段速度,分别采用三次样条拟合得到弧长对时间样条及参数对弧长样条;插补模块,用于在插补过程中,利用弧长对时间样条得到与实际进给步对应的弧长,再由参数对弧长样条得到对应的参数,从而计算插补的坐标增量。
技术总结
本发明涉及高精度参数路径插补方法及系统,其插补方法包括:S1、基于参数曲线路径的曲率单调性,根据临界曲率值点、曲率极值点分割参数曲线路径,并求取各分段弧长;S2、采用跃度有界的S曲线加减速算法分别规划各分段速度;S3、基于各分段弧长和各分段速度,分别采用三次样条拟合得到弧长对时间样条及参数对弧长样条;S4、插补过程中,利用弧长对时间样条得到与实际进给步对应的弧长,再由参数对弧长样条得到对应的参数,从而计算插补的坐标增量。本发明可显著抑制输出进给加速度波动并提高插补精度。补精度。补精度。
技术研发人员:季国顺 李蓉 张巨勇 陈志平
受保护的技术使用者:杭州电子科技大学
技术研发日:2021.12.31
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。