技术特征:
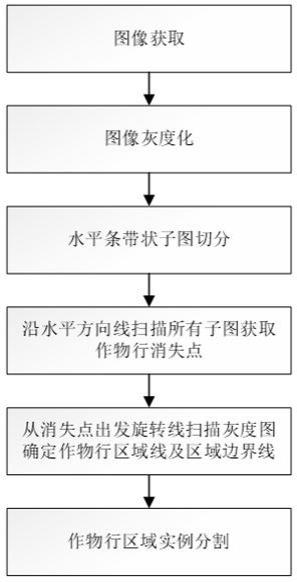
1.一种基于线型掩膜扫描寻界的田间作物行区域实例分割方法,其特征在于,包括以下步骤:s01.使用彩色相机采集作物行原图像,采集过程中所述相机与水平方向呈15
°
~45
°
夹角,距离作物行上方垂直高度为1~3m,使所述原图像中作物行呈左右对称分布;s02.将所述原图像灰度化为灰度图像;s03.根据所述灰度图像左侧或右侧边缘像素列的各像素行像素值之和间的相对大小关系,判断所述各像素行为前景像素行或为背景像素行;根据所述背景像素行在所述边缘像素列中连续分布区段长度值的相对大小关系,确定所述前景像素行到所述背景像素行所有跳变点中的主跳变点位置;从所述主跳变位置处将所述灰度图像切分为若干具有相同作物行排列模式的水平条带状子图;s04.沿水平方向对所述子图使用类线型掩膜进行扫描并生成扫描曲线簇,根据所述扫描曲线簇上特征点群中若干主特征点的相对位置关系,计算得到所述原图像中作物行的消失点;s05.使用从所述消失点出发的类线型掩膜对所述灰度图像进行旋转扫描生成扫描曲线簇,根据所述扫描曲线簇上特征点群中若干主特征点处轮廓高度值的相对大小关系,计算得到所述原图像中作物行区域线及区域边界线;s06.根据所述作物行区域线及所述区域边界线间的相对位置关系,对所述原图像中的所述作物行区域进行实例分割。2.根据权利要求1所述的方法,其特征在于,所述步骤s04中:(4.1)所述类线型掩膜扫描路径起始于所述子图左侧或右侧边缘,终止于对侧边缘;(4.2)所述类线型掩膜长度为对应所述子图的像素行数,宽度为1个像素;(4.3)所述扫描曲线簇包括每张所述子图对应的三条平滑后的扫描曲线,分别为子图扫描区域像素值之和分布曲线、子图已扫描区域像素值比重曲线及子图未扫描区域像素值比重曲线;(4.4)所述特征点群包括子图扫描区域像素值之和分布曲线上的曲线波峰点,以及子图已扫描区域像素值比重曲线和子图未扫描区域像素值比重曲线上的曲线波谷点。3.根据权利要求1所述的方法,其特征在于,所述步骤s05中:(5.1)所述类线型掩膜扫描路径起始于所述灰度图左侧或右侧上边缘点,终止于对侧上边缘点;(5.2)所述类线型掩膜长度为所述消失点至当前扫描路径上所述灰度图边缘像素点的距离,宽度为1个像素;(5.3)所述扫描曲线簇包括平滑后的灰度图扫描区域像素值之和分布曲线及平滑后的灰度图扫描区域像素值之和变化率分布曲线;
(5.3)所述特征点群包括灰度图扫描区域像素值之和分布曲线上的曲线波峰点,以及灰度图扫描区域像素值之和变化率分布曲线上的曲线波峰点和波谷点。4.根据权利要求1所述的方法,其特征在于,所述作物行为授粉期杂交水稻父本行。
技术总结
本发明公开了一种基于线型掩膜扫描寻界的田间作物行区域实例分割方法,包括图像获取;图像灰度化;将灰度图切分为若干具有相同作物行排列模式的水平条带状子图;沿水平方向使用线型掩膜对所有子图进行扫描并生成扫描曲线簇,根据扫描曲线簇上主特征点间相对位置分布情况,计算得到图像中作物行消失点;使用从消失点出发的线型掩膜对灰度图进行旋转扫描并生成扫描曲线簇,根据扫描曲线簇上主特征点处轮廓高度值的相对大小关系,计算得到作物行区域线及区域边界线;根据作物行区域线及区域边界线间相对位置分布规律,对作物行区域进行实例分割。该方法无需复杂图像预处理步骤,兼顾了识别准确性与实时性,适用于田间导航作业。业。业。
技术研发人员:王俊 李东方 王永维 韦真博
受保护的技术使用者:浙江大学
技术研发日:2021.12.21
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。