技术特征:
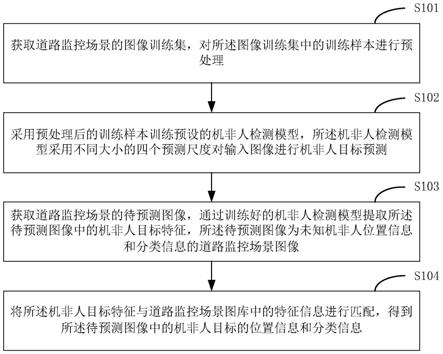
1.一种多尺度机非人检测方法,其特征在于,包括:获取道路监控场景的图像训练集,对所述图像训练集中的训练样本进行预处理,所述训练样本为已知机非人位置信息和分类信息的道路监控场景图像;采用预处理后的训练样本训练预设的机非人检测模型,所述机非人检测模型采用不同大小的四个预测尺度对输入图像进行机非人目标预测;获取道路监控场景的待预测图像,通过训练好的机非人检测模型提取所述待预测图像中的机非人目标特征,所述待预测图像为未知机非人位置信息和分类信息的道路监控场景图像;将所述机非人目标特征与道路监控场景图库中的特征信息进行匹配,得到所述待预测图像中的机非人目标的位置信息和分类信息。2.如权利要求1所述的多尺度机非人检测方法,其特征在于,所述对所述图像训练集中的训练样本进行预处理包括:将所述图像训练集中的训练样本调整为预设尺寸。3.如权利要求1所述的多尺度机非人检测方法,其特征在于,所述机非人检测模型包括主干网络和特征融合层;所述主干网络采用cspdarknet53网络,包括依次首尾相连的第一阶段、第二阶段、第三阶段、第四阶段,所述第一阶段和第二阶段输出浅层特征,所述第三阶段和第四阶段输出深层特征,其中所述第一阶段输出的浅层特征比第二阶段输出的浅层特征更浅,所述第四阶段输出的深层特征比第三阶段输出的深层特征更深;所述特征融合层由conv、upsample、bottleneckcsp组成,用于对主干网络中第四阶段输出的深层特征进行特征提取,分别得到不同层次的第一特征、第二特征、第三特征、第四特征、第五特征以及第六特征;对所述第二阶段输出的浅层特征和第二特征上采样后的特征、所述第三阶段输出的深层特征和第一特征上采样后的特征、所述第一阶段输出的浅层特征和第三特征上采样后的特征、所述第四阶段输出的深层特征和第六特征、第二特征和第五特征、第三特征和第四特征分别进行融合,得到不同尺度的融合特征;将所述不同尺度的融合特征中的后四个融合特征输入预测层,所述预测层采用大小不同的四预测尺度进行机非人目标预测,得到机非人目标特征。4.如权利要求3所述的多尺度机非人检测方法,其特征在于,所述大小不同的四个预测尺度包括16*16、32*32、64*64、128*128,其中16*16用于进行大目标预测,所述128*128用于进行小目标预测。5.如权利要求3或4所述的多尺度机非人检测方法,其特征在于,所述机非人检测模型的损失函数为边框回归损失函数、置信度损失函数和分类损失函数的加权和;所述边框回归损失函数采用ciou loss和distribution focal loss的和;所述置信度损失函数采用focalloss;所述分类损失函数采用多分类的focalloss。6.如权利要求1所述的多尺度机非人检测方法,其特征在于,所述将所述机非人目标特征与道路监控场景图库中的特征信息进行匹配,得到所述待预测图像中的机非人目标的位置信息和分类信息包括:遍历所述道路监控场景图库中的特征信息,计算所述机非人目标特征与所述特征信息
之间的相似度;选取相似度最大的特征信息作为所述机非人目标特征的最相似特征;以所述最相似特征对应的机非人位置信息和分类信息作为所述机非人目标特征的匹配信息。7.如权利要求6所述的多尺度机非人检测方法,其特征在于,所述相似度为余弦相似度;所述余弦相似度为所述机非人目标特征与所述特征信息的转置矩阵的乘积。8.一种多尺度机非人检测装置,其特征在于,所述装置包括:预处理模块,用于获取道路监控场景的图像训练集,对所述图像训练集中的训练样本进行预处理,所述训练样本为已知机非人位置信息和分类信息的道路监控场景图像;训练模块,用于采用预处理后的训练样本训练预设的机非人检测模型,所述机非人检测模型采用不同大小的四个预测尺度对输入图像进行机非人目标预测;特征提取模块,用于获取道路监控场景的待预测图像,通过训练好的机非人检测模型提取所述待预测图像中的机非人目标特征,所述待预测图像为未知机非人位置信息和分类信息的道路监控场景图像;匹配模块,用于将所述机非人目标特征与道路监控场景图库中的特征信息进行匹配,得到所述待预测图像中的机非人目标的位置信息和分类信息。9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的多尺度机非人检测方法。10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的多尺度机非人检测方法。
技术总结
本发明公开了一种多尺度机非人检测方法,包括:获取道路监控场景的图像训练集,对所述图像训练集中的训练样本进行预处理;采用预处理后的训练样本训练预设的机非人检测模型,所述机非人检测模型采用不同大小的四个预测尺度对输入图像进行机非人目标预测;获取道路监控场景的待预测图像,通过训练好的机非人检测模型提取所述待预测图像中的机非人目标特征;将所述机非人目标特征与道路监控场景图库中的特征信息进行匹配,得到所述待预测图像中的机非人目标的位置信息和分类信息。本发明在机非人检测模型的预测步骤中采用四个预测尺度,可以兼顾更小目标的检测,对大目标和小目标都有较好的检测效果,有效地提高了机非人检测的精确度和稳健性。精确度和稳健性。精确度和稳健性。
技术研发人员:王慧 陈利军 洪曙光 王祥雪 林焕凯 刘双广
受保护的技术使用者:西安电子科技大学
技术研发日:2021.11.30
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。