1.本发明涉及智能安防技术领域,特别涉及一种智能安防控制方法、智能安防设备及控制器。
背景技术:
2.现在很多场所都使用了智能安防设备,如智能门铃、智能监控摄像头等,在检测到有人进入待检测区后,便开启摄像头、麦克风和喇叭模块,从而使得用户侧能够与智能安防设备前的人员进行视频电话沟通,但如果使用者旁边有其他人说话,或者是存在环境干扰音,会使得用户侧听不清智能安防设备前的人员的说话内容,导致通话质量下降。
技术实现要素:
3.本发明的主要目的是提供一种智能安防控制方法、智能安防设备及控制器,旨在提高智能安防设备的通话质量。
4.为实现上述目的,本发明提出一种智能安防控制方法,所述智能安防设备包括整机,所述整机内设置有前麦克风以及与所述前麦克风分别形成端射阵列的左后麦克风和右后麦克风,所述智能安防设备控制方法包括:
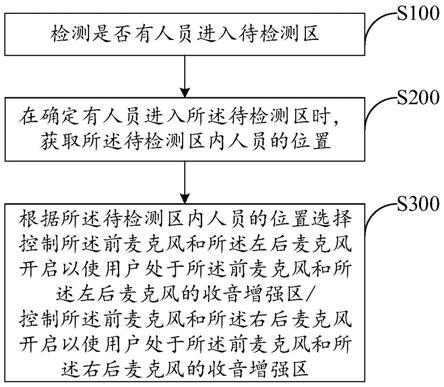
5.检测是否有人员进入待检测区;
6.在确定有人员进入所述待检测区时,获取所述待检测区内人员的位置;
7.根据所述待检测区内人员的位置选择控制所述前麦克风和所述左后麦克风开启以使用户处于所述前麦克风和所述左后麦克风的收音增强区/控制所述前麦克风和所述右后麦克风开启以使用户处于所述前麦克风和所述右后麦克风的收音增强区。
8.可选地,所述整机内还设置有红外传感器,所述检测是否有人员进入待检测区的步骤具体为:
9.检测所述待检测区内的红外辐射值,并生成红外检测信息;
10.所述确定有人员进入所述待检测区的步骤具体为:
11.在根据所述红外检测信息,确定所述待检测区内的红外辐射值在预设人体辐射值区间时,确定有人员进入所述待检测区。
12.可选地,所述整机内还设置有图像传感组件,所述图像传感组件包括图像传感器和透镜,所述获取所述待检测区内人员的位置的步骤具体为:
13.开启图像传感组件拍摄所述待检测区内人员,并获取所述图像传感器上成像位置与所述图像传感器的中心点之间的距离信息;
14.根据所述距离信息和所述图像传感器与所述透镜之间的距离,计算得到所述待检测区内人员与所述整机的站立角度,并生成站立角度信息;
15.所述根据所述待检测区内人员的位置选择控制所述前麦克风和所述左后麦克风开启以使用户处于所述前麦克风和所述左后麦克风的收音增强区/控制所述前麦克风和所述右后麦克风开启以使用户处于所述前麦克风和所述右后麦克风的收音增强区的步骤具
体为:
16.根据所述站立角度信息,控制所述前麦克风和所述左后麦克风开启或所述前麦克风和所述右后麦克风开启。
17.可选地,所述根据所述站立角度信息,控制所述前麦克风和所述左后麦克风开启或所述前麦克风和所述右后麦克风开启的步骤具体为:
18.根据所述站立角度信息,确定所述待检测区内的人员站立于所述整机的右前方时,控制所述前麦克风和所述左后麦克风开启;
19.根据所述站立角度信息,确定所述待检测区内的人员站立于所述整机的左前方时,控制所述前麦克风和所述右后麦克风开启。
20.可选地,所述在确定有人员进入所述待检测区时,获取所述待检测区内人员的位置的步骤还包括:
21.在确定有人员进入所述待检测区时,获取所述待检测区内人员的图像信息;
22.对所述图像信息进行动作识别,生成相应的人员动作信息;
23.所述根据所述待检测区内人员的位置选择控制所述前麦克风和所述左后麦克风开启以使用户处于所述前麦克风和所述左后麦克风的收音增强区/控制所述前麦克风和所述右后麦克风开启以使用户处于所述前麦克风和所述右后麦克风的收音增强区的步骤具体为:
24.在根据所述人员动作信息确定所述待检测区内的人员的嘴部动作为说话动作时,根据所述待检测区内人员的位置选择控制所述前麦克风和所述左后麦克风开启以使用户处于所述前麦克风和所述左后麦克风的收音增强区/控制所述前麦克风和所述右后麦克风开启以使用户处于所述前麦克风和所述右后麦克风的收音增强区;
25.根据所述人员动作信息,确定所述待检测区内的人员的嘴部动作不为说话动作时,控制所述前麦克风、所述左后麦克风和所述右后麦克风保持不工作状态。
26.可选地,所述智能安防设备控制方法还包括:
27.采集所述待检测区内人员的行为状态,并生成相应的行为状态信息,并根据所述行为状态信息判断所述待检测区内人员的说话意图。
28.可选地,所述采集所述待检测区内人员的行为状态,并生成相应的行为状态信息,并根据所述行为状态信息判断所述待检测区内人员的说话意图的步骤具体为:
29.获取待检测区内的音频,并输出相应的待检测区音频信息;
30.根据所述待检测区音频信息,在确定所述待检测区的音频幅值达到预设音频幅值时,判断所述待检测区内人员具有说话意图;
31.根据所述待检测区音频信息,在确定所述待检测区的音频幅值未达到预设音频幅值时,判断所述待检测区内人员无说话意图。
32.可选地,所述整机内还设置有喇叭模块,所述根据所述待检测区音频信息,在确定所述待检测区的音频幅值达到预设音频幅值时,判断所述待检测区内人员具有说话意图的步骤还包括:
33.在确定所述待检测区内人员具有说话意图时,控制所述喇叭模块开始工作;
34.所述根据所述待检测区音频信息,在确定所述待检测区的音频幅值未达到预设音频幅值时,判断所述待检测区内人员无说话意图的步骤还包括:
35.在确定所述待检测区内人员无说话意图时,控制所述喇叭模块保持停止工作状态。
36.本发明还提出了一种智能安防设备控制器,所述智能安防设备控制器包括:
37.存储器;
38.处理器;以及
39.存储在所述存储器上并被所述处理器执行的智能安防控制程序,所述智能安防控制程序在被所述处理器执行时,实现如上述任一项所述的智能安防控制方法。
40.本发明还提出了一种智能安防设备,所述智能安防设备包括:
41.整机;
42.如上述所述的智能安防设备控制器,所述智能安防设备控制器设置于所述整机内;
43.喇叭模块,所述喇叭模块设置于所述整机内,所述喇叭模块与所述智能安防设备控制器电连接;
44.前麦克风、左后麦克风和右后麦克风,所述前麦克风与所述左后麦克风成端射阵列设置于所述整机内,所述前麦克风与所述右后麦克风成端射阵列设置于所述整机内,所述前麦克风、所述左后麦克风和所述右后麦克风均与所述智能安防设备控制器电连接;
45.人员进入检测组件,所述人员进入检测组件设置于所述整机内,所述人员进入检测组件与所述智能安防设备控制器电连接;
46.图像传感组件,所述图像传感组件设置于所述整机内,所述图像传感组件包括图像传感器和透镜,所述图像传感组件与所述智能安防设备控制器电连接。
47.本发明技术方案中,先检测是否有人员进入待检测区,并在确定有人员进入待检测区内时,获取待检测区内人员的位置,再根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区/控制前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区,以使得待检测区内人员与整机所在的直线与前麦克风和左后麦克风/右后麦克风形成的直线的角度尽量接近0
°
,即使待检测区内人员处于前麦克风和左后麦克风/右后麦克风的收音增强区。如此,便能够有效的降低了获取到的待检测区内人员说话声音信号中的噪音成分,并且有效地提高了说话声音信号的音频幅值,从而在使智能安防设备的用户侧听到的待检测区内的人员的说话声音更加的清楚,提高了用户使用智能安防设备的便利性以及提高了智能安防设备的通话质量。
附图说明
48.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
49.图1为本发明智能安防控制方法一实施例的方法步骤流程图;
50.图2为本发明智能安防控制方法另一实施例的方法步骤流程图;
51.图3为本发明智能安防控制方法又一实施例的方法步骤流程图;
52.图4为本发明智能安防控制方法再一实施例的方法步骤流程图;
53.图5为本发明智能安防控制方法另一实施例的方法步骤流程图;
54.图6为本发明智能安防控制方法又一实施例的方法步骤流程图;
55.图7为本发明智能安防控制方法再一实施例的方法步骤流程图;
56.图8为本发明智能安防控制方法另一实施例的方法步骤流程图;
57.图9为本发明智能安防控制方法一实施例的方法具体执行示意图;
58.图10为本发明智能安防控制方法一实施例的方法具体执行示意图;
59.图11为本发明智能安防设备一实施例的功能模块示意图;
60.图12为成端射阵列的前麦克风和后麦克风的示意图。
61.附图标号说明:
[0062][0063][0064]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0065]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0066]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0067]
应该理解的是,虽然本技术实施例中的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0068]
需要说明的是,在本文中,采用了诸如s100、s200等步骤代号,其目的是为了更清楚简要地表述相应内容,不构成顺序上的实质性限制,本领域技术人员在具体实施时,可能会先执行s200后执行s100等,但这些均应在本技术的保护范围之内。
[0069]
需要理解的是,现在很多场所都使用了智能安防设备,如智能门铃、智能监控摄像头等,在检测到有人进入待检测区后,便开启摄像头、麦克风和喇叭模块,从而使得用户侧能够与智能安防设备前的人员进行视频电话沟通,但如果使用者旁边有其他人说话,或者是存在环境干扰音,会使得用户侧听不清智能安防设备前的人员的说话内容,导致通话质量下降。
[0070]
为此,本发明提出一种智能安防控制方法,应用于智能安防设备,智能安防设备包括整机,整机内设置有前麦克风以及与前麦克风分别形成端射阵列的左后麦克风和右后麦克风。
[0071]
需要理解的是,参考图10和图12,前麦克风和后麦克风成端射阵列,在实际工作中,为了提高通话质量,降低周围噪声的影响,可以采用双麦克风端射阵列形成的波束成形,如果阵列中前方麦克风的信号与后方麦克风的反相延迟信号相加,则会形成“差分”。如果声音来自0
°
,则叠加后声音变成2倍,即收音增强区,声音来自的角度越靠近0
°
则最后由前后麦克风叠加生成的待检测区音频信息的音频幅值越高且其中的噪声越小;如果声音来自90
°
,则叠加后正好相互抵消,即收音衰减区。可选地,前麦克风也可以由多个小麦克风组成前麦克风阵列,同理,后麦克风也可以由多个小麦克风组成后麦克风阵列。
[0072]
在本发明一实施例中,参考图1,本发明提出一种智能安防控制方法包括:
[0073]
步骤s100、检测是否有人员进入待检测区;
[0074]
步骤s200、在确定有人员进入待检测区时,获取待检测区内人员的位置;
[0075]
在本实施例中,智能安防设备可以包括一人员进入检测组件和与其电连接的控制器,人员进入检测组件用于检测是否有人进入了待检测区内,即智能安防设备的可识别区域内。
[0076]
可选地,人员进入检测组件可以采用红外感应器件来实现,例如红外传感器,红外传感器可以获取待检测区内的,即红外传感器预设的检测范围内的红外辐射值,并生成红外辐射检测信息至控制器,由于人体会对外辐射红外线,因此控制器可以根据红外辐射检测信息确定待检测区内的红外辐射值在常规人体红外辐射值左右时,确定有人进入。
[0077]
可选地,人员检测组件还可以采用光电传感器来实现,例如在待检测区内设置一组光栅,当待检测区内有人员进入时,会挡住光电传感器的发射端和接收端之间的路径,使接收端无法接收到发射端发射出的红外光,此时光电传感器输出一有人进入信号至控制器,例如低电平信号,当无人进入待检测区内,接收端能够正常接收发射端发射出的红外光,此时光电传感器会输出一无人进入信号至控制器,例如高电平信号,控制器便可以根据光电传感器传来的信号确定是否有人进入待检测区。
[0078]
在本实施例中,智能安防设备还包括一用于检测人员位置的人员位置检测组件,人员位置检测组件与控制器电连接,在控制器确定当前人员进入了待检测区以后,控制器可以控制人员位置检测组件检测待检测区内的人员位置。
[0079]
可选地,人员位置检测组件可以采用摄像头来实现,控制器内可集成有图像识别芯片。摄像头能够在人员进入待检测区内时,拍摄待检测区内的图像并生成相应的图像信息至控制器,控制器不仅仅将图像信息显示在智能安防设备的用户侧或者是通过内部通讯组件上传至外部终端例如用户的手机,控制器还可以根据图像信息识别待检测区内图像中的人员图像的位置,从而确定待检测区内的人员位置。
[0080]
可选地,人员位置检测组件除了直接采用用于拍摄待检测区内图像的摄像头外,还可以采用超声波定位组件或者微波定位组件来实现,控制器可以在确认有人员进入待检测区后,启动超声波定位组件,超声波定位组件可以通过超声波定位的方式定位当前人员所处的待检测区的位置。
[0081]
步骤s300、根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区/控制前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区。
[0082]
在本实施例中,智能安防设备还可以设置有与控制器电连接的喇叭模块,用于播放前后麦克风经过处理后叠加生成的待检测区音频信息。由上述内容可知,由于前麦克风分别与左后麦克风以及右后麦克风成端射阵列,待检测区内的人员所在位置与整机位置所处的直线与前麦克风和左后麦克风/右后麦克风形成的直线的角度越接近0
°
,则最终通过喇叭模块输出的待检测区音频信息的音频幅值越接近待检测区人员发出声音信号幅值的2倍,以及越清晰。
[0083]
可选的,参考图10,在实际应用中,用户一般会站在整机的左前方和右前方,因此控制器可以根据待检测区内的人员的位置,确定当前待检测区内的人员处于整机的左前方或者是右前方。当人员处于左前方时,便会控制前麦克风和右后麦克风开启,以使待检测区内的人员所在位置与整机位置所处的直线与前麦克风和右后麦克风所形成的直线的角度接近0
°
,即使待检测区内人员处于前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区。同理,当确定人员处于右前方时,便会控制前麦克风和左后麦克风开启,以使待检测区内的人员所在位置与整机位置所处的直线与前麦克风和左后麦克风所形成的直线的角度接近0
°
,即使待检测区内人员处于前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区。如此,便能够有效的降低了获取到的待检测区内人员说话声音信号中的噪音成分,并且有效地提高了说话声音信号的音频幅值,从而在使智能安防设备的用户侧听到的待检测区内的人员的说话声音更加的清楚。
[0084]
本发明技术方案中,先检测是否有人员进入待检测区,并在确定有人员进入待检测区内时,获取待检测区内人员的位置,再根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区/控制前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区,以使得待检测区内人员与整机所在的直线与前麦克风和左后麦克风/右后麦克风形成的直线的角度尽量接近0
°
,即使待检测区内人员处于前麦克风和左后麦克风/右后麦克风的收音增强区。如此,便能够有效的降低了获取到的待检测区内人员说话声音信号中的噪音成分,并且有效地提高了说话声音信号的音频幅值,从而在使智能安防设备的用户侧听到的待检测区内的人员的说话声音更加的清楚,提高了用户使用智能安防设备的便利性以及提高了智能安防设备的通话质量。
[0085]
参考图2,在本发明一实施例中,整机内还设置有红外传感器,步骤检测是否有人员进入待检测区的步骤具体为:
[0086]
步骤s110、检测待检测区内的红外辐射值,并生成红外检测信息;
[0087]
确定有人员进入待检测区的步骤具体为:
[0088]
步骤s220、在根据红外检测信息,确定待检测区内的红外辐射值在预设人体辐射
值区间时,确定有人员进入待检测区。
[0089]
在本实施例中,红外传感器会检测待检测区内的红外辐射值,并生成相应的红外检测信息至控制器。当有人员进入红外检测区域时,由于人体会对外辐射红外线,因此控制器在根据红外检测信息确定当前待检测区内的红外辐射在预设人体辐射值区间时,控制器便能够确定当前有人员进入了待检测区。其中,预设人体辐射值区间可以由研发人员根据人体红外辐射值的常规值进行预设并存储在智能安防设备的控制器内。如此,便能够通过红外识别的方式,检测是否有人员进入待检测区。同时,采用红外传感器进行是否有人员进入待检测区域,相比较采用监控摄像头,能够有效的降低整个智能安防设备的功耗。
[0090]
参考图3和图10,在本发明一实施中,整机内还设置有图像传感组件,图像传感组件包括图像传感器和透镜,获取待检测区内人员的位置的步骤具体为:
[0091]
步骤s220、开启图像传感组件拍摄待检测区内人员,并获取图像传感器上成像位置与图像传感器的中心点之间的距离信息;
[0092]
步骤s230、根据距离信息和图像传感器与透镜之间的距离,计算得到待检测区内人员与整机的站立角度,并生成站立角度信息;
[0093]
在本实施例中,图像传感组件可以为摄像头,其中摄像头内的图像传感器包括多个感光元件组成的感光元件阵列,图像传感器可以知道在感光元件阵列上的成像位置以及根据在感光元件阵列上的成像位置,自行计算得到成像位置与感光元件阵列中心点之间的距离,并生成相应的距离信息输出至智能安防设备中的控制器,控制器会根据透镜和图像传感器之间的距离(需要理解的是,该距离可以由研发人员在研发期间进行测量并预存储在控制器内),计算得到待检测区内人员与整机的站立角度,并生成站立角度信息。
[0094]
根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区/控制前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区的步骤具体为:
[0095]
步骤s310、根据站立角度信息,控制前麦克风和左后麦克风开启或前麦克风和右后麦克风开启。
[0096]
在本实施例中,由上述内容可知,会根据用户的位置不同选择前麦克风和相应的左后麦克风/右后麦克风开启,以使待检测区内人员与整机所在的直线与前麦克风和左后麦克风/右后麦克风形成的直线的角度尽量接近0
°
,即使待检测区内人员处于前麦克风和左后麦克风/右后麦克风的收音增强区。因此,控制器会根据计算得到生成的站立角度信息,即确定待检测人员相对整机所处的位置,再控制前麦克风和相应的左后麦克风/右后麦克风开启。
[0097]
可选地,参考图4,在本实施例中,根据站立角度信息,控制前麦克风和左后麦克风开启或前麦克风和右后麦克风开启的步骤具体为:
[0098]
步骤s311、根据站立角度信息,确定待检测区内的人员站立于整机的右前方时,控制前麦克风和左后麦克风开启;
[0099]
步骤s312、根据站立角度信息,确定待检测区内的人员站立于整机的左前方时,控制前麦克风和右后麦克风开启。
[0100]
具体地,参考图9和图10,α为整机和待检测区内人员的站立角度,d为图像传感器上成像位置和图像传感器中心点之间的距离,l为图像传感器和透镜之间的距离。其中,图
像传感器不仅仅会将其上成像位置和图像传感器中心点之间的距离输出至控制器,还会将成像位置与中心点之间的位置关系传输至控制器,例如成像位置在中心点的左边(靠近左后麦克风的位置),或者是成像位置在中心点的右边(靠近右后麦克风的位置)根据d和l以及反正切函数公式:α=arctan(d/l),控制器便可以得到当前待检测区内的人员与整机的之间的站立角度。
[0101]
以在待检测区人员处于整机的右前方时,站立角度α为正值,在待检测区人员处于整机的左前方时,站立角度α为负值为例进行说明。即控制器在成像位置在中心点左边时,会将计算出的α设置为正值,以及控制器在成像位置在中心点右边时,会将计算出的α设置为负值。
[0102]
当控制器根据成像位置与中心点之间的位置关系和图像传感器中心点之间的距离确定当前站立角度时,若站立角度为正值,则说明当前待检测区人员处于整机的右前方,则会控制前麦克风和左后麦克风开启。
[0103]
当控制器根据成像位置与中心点之间的位置关系和图像传感器中心点之间的距离确定当前站立角度时,若站立角度为负值,则说明当前待检测区人员处于整机的左前方,则会控制前麦克风和右后麦克风开启。从而使待检测区内人员处于前麦克风和左后麦克风/右后麦克风的收音增强区内。
[0104]
参考图5,在本发明一实施中,在确定有人员进入待检测区时,获取待检测区内人员的位置的步骤还包括:
[0105]
步骤s240、在确定有人员进入待检测区时,获取待检测区内人员的图像信息;
[0106]
在本实施例中,控制器内还可以集成有人脸识别模块,在确定待检测区内有人员时,智能安防设备内的控制器先控制图像传感器组件,例如摄像头开启,在拍摄待检测区内人员的图像,确定人员位置的同时,还会对图像信息进行动作识别,例如面部动作识别,并生成相应的人员动作信息。
[0107]
步骤s250、对图像信息进行动作识别,生成相应的人员动作信息;
[0108]
根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区/控制前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区的步骤具体为:
[0109]
步骤s340、在根据人员动作信息确定待检测区内的人员的嘴部动作为说话动作时,根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启以使用户处于前麦克风和左后麦克风的收音增强区/控制前麦克风和右后麦克风开启以使用户处于前麦克风和右后麦克风的收音增强区;
[0110]
步骤s350、根据人员动作信息,确定待检测区内的人员的嘴部动作不为说话动作时,控制前麦克风、左后麦克风和右后麦克风保持不工作状态。
[0111]
在本实施例中,若根据人员动作信息,能够正常识别到人脸图像,并且识别到待检测区内的人员的嘴部动作为说话动作时,确定当前待检测区内的人员有通话意图,便会根据待检测区内人员的位置选择控制前麦克风和左后麦克风开启或者是控制前麦克风和右后麦克风开启。例如在一定预设时间内,待检测区内人员的嘴部张比动作次数达到了预设次数时,则确定当前待检测区内的人员的嘴部动作为说话动作,待检测区内人员有通话意图,则根据检测到的待检测区内人员位置,选择前麦克风和左后/右后麦克风开启。
[0112]
此外,若控制器根据人员动作信息,并不能够正常的识别到待检测区内的人脸图像,例如当前待检测区内的人员只是路过的路人,则不会识别到待检区内的人员的人脸图像,或者是识别到待检测区内的人员的嘴部动作不是说话动作时,则确定当前待检测区内的人员并无通话意图。此时,控制器便会控制前麦克风、左后麦克风和右后麦克风保持不工作状态。如此,在确定有人进入待检测区内时,便会仅仅控制图像传感组件开启,以拍摄当前待检测区内的图像,不会同时一并开启用于收音的麦克风们,从而降低了智能安防设备的功耗。
[0113]
需要理解的是,目前的智能安防设备,在检测到待检测区内有人员时,便会开启摄像头和工作功能模块,例如通话系统。然而,在实际应用中,待检测区内的人员往往只是路过,而不是要进行语音对话,此时如果将摄像头以外的工作模块开启,其工作功率一般都在瓦级以上,这样容易增大智能安防设备的工作功耗。
[0114]
参考图6,在本发明一实施例中,智能安防设备控制方法还包括:
[0115]
步骤s400、采集待检测区内人员的行为状态,并生成相应的行为状态信息,并根据行为状态信息判断待检测区内人员的说话意图。
[0116]
在本实施例中,可以通过检测待检测区内的人员的行为状态,例如“说话的声音大小、面部动作”等行为状态,判断当前待检测区内的人员是否需要与智能安防设备的用户侧进行通话,即判断待检测区内的人员是否有通话意图。
[0117]
在本实施例中,当确定待检测区内人员有说话意图后,可以启动其他工作模块,以满足用户与待检测区内人员的通话需求;可选的,工作模块可以包括喇叭模块,当确定待检测区内人员有说话意图时,可以开启喇叭模块,以实现将麦克风拾取到的待检测区音频信息通过喇叭模块播放至用户侧;可选的,工作模块也可以为无线通讯模块例如蓝牙模块,当确定待检测区内人员有说话意图时,可以开启无线通讯模块的发送功能,以实现将麦克风拾取到的待检区音频信息通过无线通讯网络传输至用户的移动终端,例如手机。
[0118]
若确定当前待检测区内人员无说话意图,则可以控制其他工作模块处于停止工作状态或者处于待机状态。
[0119]
通过上述设置,智能安防设备能够识别当前进入待检测区内的人员是否有通话意图,并在确定其有通话意图时,开启多个工作模块,以使用户能够与待检测区内的人员实现通话;同时,在确定当前进入待检测区内的人员没有通话意图时,控制多个工作模块处于停止工作状态,从而降低智能安防设备的功耗。
[0120]
可选地,在一实施例中,参考图7,采集待检测区内人员的行为状态,并生成相应的行为状态信息,并根据行为状态信息判断待检测区内人员的说话意图的步骤具体为:
[0121]
步骤s410、获取待检测区内的音频,并输出相应的待检测区音频信息;
[0122]
在本实施例中,由上述内容可知,当根据人员动作信息确定待检测区内的人员的嘴部动作为说话动作时,便根据待检测区内的人员位置,选择控制前麦克风和左后/右后麦克风开启,以获取待检测区内的音频信号,即人员发出的说话声音。
[0123]
具体地,获取待检测区内的音频的步骤具体为:
[0124]
获取前麦克风拾取的第一音频信号;
[0125]
获取左后/右后麦克风拾取的第二音频信号;
[0126]
将第二音频信号按照预设延时时间进行反相延迟处理后,与第一音频信号叠加生
成待检测区音频信息。
[0127]
在本实施例中,第一音频信号为前麦克风获取到的待检测区内的人员发出的声音信号,第二音频信号为左后/右后麦克风获取到的待检测区内的人员发出的声音信号。
[0128]
在本实施例中,由上述内容可知,前麦克风分别与和左后/右后麦克风成端射阵列,因此,智能安防设备内的控制器在根据当前待检测区人员的位置,以及在确定待检测区人员有说话意图时,确定开启前麦克风和相应的左后/右后麦克风。此时,控制器会将接收到的为模拟信号的第一音频信号和第二音频信号转换为数字信号,再将为数字信号的第二音频信号按照预设延时时间进行延迟后再反相处理,并与为数字信号的第一音频信号叠加后形成待检测区音频信息;此外,前麦克风、左后麦克风和右后麦克风还可自带模数转换器,从而使输出的第一音频信号和第二音频信号均为数字信号。其中,预设延时时间可以由研发人员根据前前麦克风和左后麦克风以及前麦克风和右后麦克风之间的距离进行多次实验而获得并预设在控制器内。
[0129]
步骤s420、根据待检测区音频信息,在确定待检测区的音频幅值达到预设音频幅值时,判断待检测区内人员具有说话意图;
[0130]
步骤s430、根据待检测区音频信息,在确定待检测区的音频幅值未达到预设音频幅值时,判断待检测区内人员无说话意图。
[0131]
在本实施例中,控制器此时会根据经过上述处理后生成的待检测区音频信息,确定当前待检测区内的音频幅值,若音频幅值达到了预设幅值,例如,预设幅值表征的声音强度为30分贝,若音频幅值所表征的声音强度为40分贝。同时,待检测区内的人员的嘴部动作为说话动作时,则确定当前待检测区内的人员有通话需求,便会开启其他工作模块,以满足用户使用的需求。
[0132]
具体地,整机内还设置有喇叭模块,根据待检测区音频信息,在确定待检测区的音频幅值达到预设音频幅值时,判断待检测区内人员具有说话意图的步骤还包括:
[0133]
步骤s421、在确定待检测区内人员具有说话意图时,控制喇叭模块开始工作;
[0134]
在本实施例中,在确定待检测区内的人员有说话意图时,便开启喇叭模块开始,以满足用户和待检测区内人员的通话需求,使用户能够在智能安防设备的用户侧听到喇叭模块传来的待检测区音频信息。
[0135]
在本实施例中,若当前音频幅值未达到了预设幅值,则可能说明当前待检测区内的人员只是在和其他人说话,或者是仅仅是走路路过时的脚步声,此时控制器不会控制其他工作模块开启,以降低当前的智能安防设备的功耗。
[0136]
具体地,根据待检测区音频信息,在确定待检测区的音频幅值未达到预设音频幅值时,判断待检测区内人员无说话意图的步骤还包括:
[0137]
步骤s431、在确定待检测区内人员无说话意图时,控制喇叭模块保持停止工作状态。
[0138]
在本实施例中,当确定待检测内的人员没有说话意图时,控制器便不会开启喇叭模块,从而有效地降低了智能安防设备的功耗。
[0139]
可选的,在另一实施例中,结合上述实施例内容,若控制器根据人员动作信息,发现当待检测区内的人员无通话意图时,即嘴部动作不为说话动作时,那也可以同时会控制喇叭模块处于停止工作状态。如此,在有人进入待检测区内时,若其无通话意图,则智能安
防设备不会启动和通话系统内相关的组件开始工作,更进一步地降低了智能安防设备的功耗。
[0140]
通过判断当前待测区内的人员的行为是否同时满足有嘴部说话动作以及说话声音的强度达到预设幅值表征的分贝,可以有效地提高智能安防设备判断人员是否有通话需求的准确性,更进一步的保证了智能安防设备工作的可靠性与稳定性,防止了因为误判导致智能安防设备误启动喇叭模块导致功耗变高的情况发生。
[0141]
参考图11,本发明还提出一种智能安防设备控制器,智能安防设备控制器包括:
[0142]
存储器10;
[0143]
处理器20,处理器20与存储器10电连接;以及
[0144]
存储在存储器10上并被处理器20执行的智能安防控制程序,智能安防控制程序在被处理器20执行时,实现如上述任一项的智能安防控制方法。
[0145]
值得注意的是,由于本发明智能安防设备控制器基于上述的智能安防控制方法,因此,本发明智能安防设备控制器的实施例包括上述智能安防控制方法全部实施例的全部技术方案,且所达到的技术效果也完全相同,在此不再赘述。
[0146]
参考图11,本发明还提出一种智能安防设备,智能安防设备包括:
[0147]
整机00;
[0148]
上述的智能安防设备控制器,智能安防设备控制器设置于整机00内;
[0149]
喇叭模块70,喇叭模块设置于整机00内,喇叭模块与智能安防设备控制器电连接;
[0150]
前麦克风30、左后麦克风40和右后麦克风80,前麦克风30与左后麦克风40成端射阵列设置于整机00内,前麦克风30与右后麦克风80成端射阵列设置于整机00内,前麦克风30、左后麦克风40和右后麦克风80均与智能安防设备控制器电连接;
[0151]
人员进入检测组件50,人员进入检测组件50设置于整机00内,人员进入检测组件50与智能安防设备控制器电连接;
[0152]
图像传感组件60,图像传感组件60设置于整机00内,图像传感组件60包括图像传感器61和透镜62,图像传感组件60与智能安防设备控制器电连接;
[0153]
在本实施例中,智能安防设备控制器可以选用mcu、dsp(digital signal process,数字信号处理芯片)、fpga(field programmable gate array,可编程逻辑门阵列芯片)来实现。
[0154]
在本实施例中,智能安防设备控制器中的处理器20分别与喇叭模块70、前麦克风30、左后麦克风40、右后麦克风80、人员进入检测组件50和图像传感器61电连接。可选的,喇叭模块70可以采用扬声器和与其电连接的放大电路来实现;人员进入检测组件50可以采用红外传感器、光栅传感器等来实现,图像传感组件60可以为摄像头来实现,摄像头中设置有图像传感器61和透镜62。
[0155]
值得注意的是,由于本发明智能安防设备基于上述的智能安防设备控制器和智能安防控制方法,因此,本发明智能安防设备的实施例包括上述智能安防设备控制器和智能安防控制方法全部实施例的全部技术方案,且所达到的技术效果也完全相同,在此不再赘述。
[0156]
以上所述仅为本发明的可选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用
在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
