1.本发明涉及太阳能无人机技术领域,尤其涉及一种太阳能无人机能源采集效率计算方法。
背景技术:
2.太阳能无人机以太阳能为能源,理论上可以永久飞行,且对环境无污染,使用灵活、成本低,有着广阔的应用前景。在民用上可用于大气研究、天气预报、环境及灾害监测、农作物遥测、交通管制、电信和电视服务、自然保护区监控等;军事上可用于边境巡逻、侦察、通信中继等。
3.考虑到太阳能无人机应用特点,太阳能电池组件不仅具有较高转换效率,还要具备轻质、柔性、可适应机翼翼型曲面应用等特点。现阶段按太阳能电池组件应用方式不同,太阳能无人机主要分为蒙皮一体化和硬壳式无人机,两种类型的无人机各有优缺点。太阳能电池组件在机上敷设完成后,需要通过组件之间的串并联形成多个太阳能电池阵。太阳能电池阵的发电功率、电压范围需匹配对应的mppt(最大功率点跟踪)控制器。太阳能电池阵的设计至关重要,关系到太阳能电池能否实现最大功率输出以及全机能源采集效率。太阳能电池组件在机上敷设前都会在标准条件下测量其转换效率。太阳能电池组件在机上组成太阳能电池阵后,受机翼曲面、测试条件等影响,无法测试其标准条件下的转换效率,只能大致评估其能量采集情况,该方法不能支撑对飞行试验过程能源采集的预估。
技术实现要素:
4.本发明提供一种太阳能无人机能源采集效率计算方法,该方法能较为准确的评估太阳能无人机地面能源采集效率以及复核飞行试验中能源采集效率。
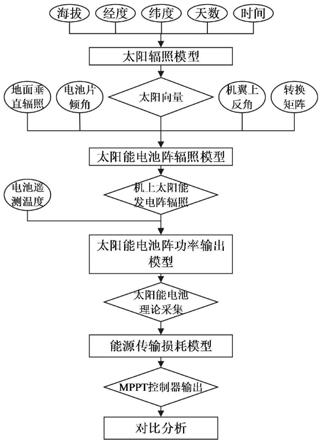
5.本发明步骤包括:建立太阳辐照模型,建立太阳能电池阵辐照模型,建立太阳能电池阵功率输出模型,计算每个发电阵对应的mppt控制器理论输出功率,将遥测得到mppt控制器实际输出功率数值与理论值比对,得到太阳能无人机能源采集效率。
6.进一步地,建立太阳辐照模型包括:
7.地面垂直辐照记录,用水平测量仪寻找水平面,水平面周围无遮挡物,辐照计测试探头与大地水平面垂直,监测并记录垂直辐照强度ig;
8.太阳能电池组件敷设过程中增加温度传感器,地面遥测记录太阳能电池工作温度t
cell
;
9.参考辐照模型,以当地纬度lati、当地经度longi、海拔h、天数nd、时间t作为输入,输出太阳高度角ha和方位角ψ,计算出惯性坐标系下太阳位置向量方向
10.由记录垂直辐照强度ig和太阳高度角ha,计算太阳位置向量大小is:
11.is=ig/sin(ha)。
12.进一步地,辐照强度记录间隔时间为1~3秒。
13.进一步地,建立太阳能电池阵辐照模型包括:
14.将机翼翼型选用的电池片进行分段折线化,各个电池片倾角为机翼上反角为θ
sf
,则机体坐标系中,相同倾角的太阳能电池片串联成一个发电阵,发电阵单位法线向量可表示为:
[0015][0016]
通过坐标系变换,将机体坐标系中发电阵单位法向量转换成惯性坐标系下的单位法向量
[0017][0018]jeb
为转换矩阵:
[0019][0020]
式中,θ
p
为飞机的俯仰角,θy为飞机的偏航角,θr为飞机的滚转角,进一步,求出无人机上太阳能电池片上太阳光的垂直入射量
[0021][0022]
进一步地,建立太阳能电池阵功率输出模型包括,
[0023]
根据太阳能电池工作温度,参考标况下转换效率η、温度系数c
cell
、常温t0,计算出该温度下太阳能电池转换效率η
cell
:
[0024]
η
cell
=η*(1-c
cell
*(t
cell-t0))
[0025]
以太阳能电池电池片太阳光垂直入射量太阳能电池阵包含的电池片数量工作温度下转换效率η
cell
、选型太阳能电池单体有效发电面积as作为输入,计算得到每个太阳能电池阵的理论输出功率p
isolar
:
[0026][0027]
进一步地,计算每个发电阵对应的mppt控制器理论输出功率:
[0028]
p
imppt
=p
isolar
*η
line
*η
shade
*η
mppt
[0029]
其中,η
line
为线缆损耗系数、η
shade
为遮挡损耗系数、η
mppt
为mppt控制器效率系数。
[0030]
本发明的有益效果:
[0031]
通过上述技术方案,可计算出太阳能无人机理论能源采集情况。通过与机上遥测得到功率值比对,可评估机上太阳能电池采集效率。本发明利用地面实测辐照值、太阳能电池遥测温度值,结合无人机上太阳能电池实际组阵方式以及相关理论计算,解决了机上太阳能电池阵能源采集效率难以准确评估的现状。该方法工程上也易实现。
附图说明
[0032]
图1为本发明实施例提供的一种太阳能无人机能源采集效率计算方法中计算流程图;
[0033]
图2为本发明实施例提供的一种太阳能无人机能源采集效率计算方法中发电池片
倾角划分示意图;
[0034]
图3位本发明实施例提供的一种太阳能无人机能源采集效率计算方法中发发电阵示意图。
[0035]
图2中标号1为机翼翼型,标号2为太阳能电池片。
具体实施方式
[0036]
下面结合附图对本发明作进一步详细说明。
[0037]
本发明的技术解决方案:一种太阳能无人机能源采集效率计算方法,主要包括:地面垂直辐照记录、太阳能电池遥测温度记录、建立太阳辐照模型、建立太阳能电池阵辐照模型、建立太阳能电池发电阵功率输出模型、建立能源传输损耗模型、对比分析。
[0038]
首先,用水平测量仪寻找水平面,水平面周围无遮挡物。辐照计测试探头与大地水平面垂直,监测并记录垂直辐照强度ig,辐照强度记录间隔1~3秒。
[0039]
进一步地,太阳能电池组件敷设过程中增加温度传感器,地面遥测记录太阳能电池工作温度t
cell
。
[0040]
进一步地,参考辐照模型,以当地纬度lati、当地经度longi、海拔h、天数nd、时间t作为输入,输出太阳高度角ha和方位角ψ,进一步计算出惯性坐标系下太阳位置向量方向
[0041]
进一步地,由记录垂直辐照强度ig和太阳高度角ha,可计算出太阳位置向量大小is:
[0042]is
=ig/sin(ha)
[0043]
至此,建立了惯性坐标系下太阳辐照模型。
[0044]
将每个发电阵列中太阳能电池片按照与机体坐标系x轴成一定倾角的平面处理,即将机翼翼型用选用的电池片进行分段折线化。各个电池片倾角为机翼上反角为θ
sf
。则机体坐标系中,相同倾角的太阳能电池片串联成一个发电阵,发电阵单位法线向量可表示为:
[0045][0046]
通过坐标系变换,将机体坐标系中发电阵单位法向量转换成惯性坐标系下的单位法向量
[0047][0048]jeb
为转换矩阵:
[0049][0050]
式中,θ
p
为飞机的俯仰角,θy为飞机的偏航角,θr为飞机的滚转角。进一步,求出无人机上太阳能电池片上太阳光的垂直入射量
[0051]
[0052]
至此,建立了太阳能电池阵辐照模型。
[0053]
进一步地,根据太阳能电池工作温度,参考标况下转换效率η、温度系数c
cell
、常温t0,计算出该温度下太阳能电池转换效率η
cell
:
[0054]
η
cell
=η*(1-c
cell
*(t
cell-t0))
[0055]
以太阳能电池电池片太阳光垂直入射量太阳能电池阵包含的电池片数量工作温度下转换效率η
cell
、选型太阳能电池单体有效发电面积as作为输入,计算得到每个太阳能电池阵的理论输出功率p
isolar
:
[0056][0057]
进一步地,考虑线缆损耗系数η
line
、遮挡损耗系数η
shade
、mppt控制器效率系数η
mppt
,计算每个发电阵对应的mppt控制器输出功率:
[0058]
p
imppt
=p
isolar
*η
line
*η
shade
*η
mppt
[0059]
整个太阳能无人机发电总功率为各个mppt控制器输出功率之和。进一步地,通过机上遥测得到的mppt输出功率与上述方案中理论输出进行比对,可评估机上太阳能电池采集效率。
[0060]
通过上述技术方案,可计算出太阳能无人机理论能源采集情况。通过与机上遥测得到功率值比对,可评估机上太阳能电池采集效率。本发明利用地面实测辐照值、太阳能电池遥测温度值,结合无人机上太阳能电池实际组阵方式以及相关理论计算,解决了机上太阳能电池阵能源采集效率难以准确评估的现状。该方法工程上也易实现。
[0061]
下面结合实施图对该敷设方法进行进一步说明。图3为9个太阳能发电阵的左侧机翼,机翼弦长为1120mm,机翼上反角3
°
。图2为机翼翼型,翼型上曲线用125mm*125mm的晶硅太阳能电池片划分了9段折线,9段折线分别与x轴形成9个倾角。9段折线沿翼展方向对应9个太阳能电池阵,每个阵均包含55个电池片,每片电池片面积为0.0156m2。所选的晶硅电池标况下转换效率为22%,温度系数为-0.25%。线缆损失系数取0.97,遮挡损失系数取0.97,mppt控制器效率系数取0.98。下面结合图1对实施例进行说明。
[0062]
步骤1:用水平测量仪寻找水平面,辐照计测试探头与大地水平面垂直,监测并记录垂直辐照强度,辐照强度记录间隔2秒。太阳能电池组件敷设过程中增加温度传感器,地面遥测记录太阳电池工作温度t
cell
;
[0063]
步骤2:参考辐照模型,以当地纬度、当地经度、海拔、天数、时间作为输入,输出太阳高度角和方位角,结合方向向量计算公式计算出惯性坐标系下太阳位置向量方向。由记录垂直辐照强度和太阳高度角,计算出太阳位置向量大小。至此建立了惯性坐标系太阳辐照模型;
[0064]
步骤3:将每个发电阵列中太阳能电池片按照与机体坐标系x轴成一定倾角的平面处理,即将机翼翼型用选用的电池片进行分段折线化。各个电池片倾角为θ
qzi
,机翼上反角为θ
sf
。在机体坐标系中,结合机翼上反角和9个电池片倾角值,分别建立9个太阳能电池发电阵单位法向量。进一步通过坐标系变换,将机体坐标系中发电阵单位法向量转换成惯性坐标系下的单位法向量,再与太阳向量求余弦,即可得到任意飞行时刻9个太阳能电池发电阵垂直辐照强度;
[0065]
步骤4:结合遥测记录的太阳能电池温度和电池片温度系数,计算出该温度下的太
阳能电池转换效率。电池阵垂直辐照强度、电池阵包含的电池片数量、电池片发电面积与转换效率的乘积即为各个电池阵理论输出功率;
[0066]
步骤5:各个电池阵理论输出功率与线缆损失系数取、遮挡损失系数、mppt控制器效率系数的乘积即为每个发电阵对应的mppt控制器理论输出功率;
[0067]
步骤6:飞行试验或地面试验过程中,可遥测得到mppt控制器实际输出功率数值,通过比对理论和实际值,即可分析出太阳能无人机能源采集效率。
[0068]
上述具体实施方式仅限于解释和说明本发明的技术方案,但并不能构成对权利要求保护范围的限定。本领域技术人员应当清楚,在本发明的技术方案的基础上做任何简单的变形或替换而得到的新的技术方案,均落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。