1.本发明属于任务效能评估技术领域,特别涉及一种面向任务的多维度效能评估方法,从多个层次,多个角度对任务的效能进行全面的评估。
背景技术:
2.面向任务的多维度效能评估并非指某一领域的研究,而是涉及从地形特征提取、通视分析、土质和降雨分析等基础环境研究,到通行地图、各类专题地图分析等任务综合研究,再到越野导航,空降分析等应用研究的大型的综合分析。面向任务的多维度效能评估是兵棋对抗、演算、策略制定等的基础,是地理环境科学的核心课题之一。环境影响的认知过程是复杂的,认知层次丰富,分析过程交错,既有“能不能看见”这样清晰具体的分析目标,又有“这条道路是否危险”这样模糊抽象的认识。环境效能评估的相关研究大多发展于传统gis分析,相关技术应用广泛,但在实际应用领域也存在不足。相关研究大多基于对空间的分析,代价或收益的累积基本只与空间有关,而忽略了时间对于风险和代价的累积作用;部分问题研究型过于简化,较少考虑甚至忽略了态势、参与各方的人员装备能力的影响,忽略了环境和态势随时间不断变化的影响,也未详细分析不同任务风险偏好的影响;传统基于gis的方法难以进行时空协同分析计算,其结果一般仅表达了空间分析的结论。
3.传统方法中任务的代价或收益计算仅与空间有关,忽略了时间对代价或收益的累积作用。一般仅考虑空间冲突,而忽略了时空冲突。空间冲突并不一定等于时空冲突,在某些特殊情况下,空间冲突可以通过敌我双方行动的时间差来解决。且影响因素考虑不够全面,评估指标单一,这个问题可三个方面:(1)传统研究容易忽略态势,能力,和参与人员的生物习性的影响。相较于单纯的环境影响,某些情况下态势和能力等因素才是影响任务表现的主要因素。但传统研究中,大多对相关因素的考虑不够全面,甚至被直接忽略。(2)传统研究面临评估指标单一的问题。比如传统越野任务的分析结果一般是一条推荐的最优道路,只能通过该道路的表现推断任务在相应环境的表现。此类分析的评估指标单一,不便于分析任务区域的风险分布,难以精确获得任务方案可行的空间和时间范围,无法评估任务方案的可靠性和态势对任务的整体影响等等。(3)传统研究的部分规划原则有悖任务需求。当前面向越野的路径分析大多基于空间的分析,遵循规划路径不可交叉或重叠的基本原则,然而这却与真正的军事需求相悖。在军事活动中,由于战场态势和环境的变化,空间重叠或交叉的路径是有存在的意义的。且,任务规划对于任务效能评估的意义在于,其能找到并通过对典型方案的评估来认识任务在环境综合影响下的各种表现情况。然而任务的效能评估不是对任务的可行方案进行无序列举的过程,一个典型方案仅能体现一种完成任务的可能表现,建立对任务表现情况的“点状”的认识,再多的典型方案的表现也难以让人形成对任务表现整体且连续的评价,形成“面状”的认识。对任务的效能评估应当抓住对任务效能认知的本质,从表面问题到内部问题,从具体问题到抽象问题,从较低层次的认知到较高层次的认知逐步过渡。
技术实现要素:
4.为此,本发明提供一种面向任务的多维度效能评估方法,利用环境综合影响模型充分体现环境和态势随时间的连续变化,利用空间活动的时间差解决空间冲突问题,将态势、能力等作为与环境影响同等重要因素,基于极端表现、可到达时空区域范围及最小综合代价由点到面再回到点、由具体到抽象再回到具体,逐步建立对任务效能的多层次认知,贴近实际应用,实现越野任务中多层次、多角度、全方位的效能评估,便于制定时空整体最优、代价最小的任务执行方案,科学、合理,效率高,便于实际场景应用。
5.按照本发明所提供的设计方案,提供一种面向任务的多维度效能评估方法,包含:
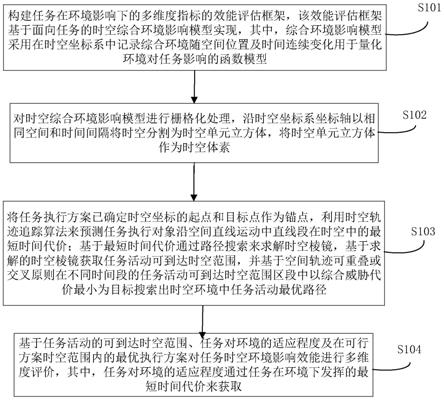
6.构建任务在环境影响下的多维度指标的效能评估框架,该效能评估框架基于面向任务的时空综合环境影响模型实现,其中,综合环境影响模型采用在时空坐标系中记录综合环境随空间位置及时间连续变化用于量化环境对任务影响的函数模型,多维度指标包含:基于综合环境影响模型以达成任务的最短时间为指标来评估任务对任务极端表现能力、预测评估因环境和态势影响形成的任务活动应当规避时空区域边界,评估在环境能力和态势影响下任务活动可到达时空区域范围,及在环境综合影响下任务活动的最佳表现;
7.对时空综合环境影响模型进行栅格化处理,沿时空坐标系坐标轴以相同空间和时间间隔将时空分割为时空单元立方体,将时空单元立方体作为时空体素;
8.将任务执行方案已确定时空坐标的起点和目标点作为锚点,利用时空轨迹追踪算法来预测任务执行对象沿空间直线运动中直线段在时空中的最短时间代价;基于最短时间代价通过路径搜索来求解时空棱镜,基于求解的时空棱镜获取任务活动可到达时空范围,并基于空间轨迹可重叠或交叉原则在不同时间段的任务活动可到达时空范围区段中以综合威胁代价最小为目标搜索出时空环境中任务活动最优路径;
9.基于任务活动的可到达时空范围、任务对环境的适应程度及在可行方案时空范围内的最优执行方案对任务时空环境影响效能进行多维度评价,其中,任务对环境的适应程度通过任务在环境下发挥的最短时间代价来获取。
10.作为本发明面向任务的多维度效能评估方法,进一步地,时空综合环境影响模型表示为函数随时间t连续变化的环境变量e(t)、态势变量s(t)和能力变量p(t)的数学模型f=m(e(t),s(t),p(t)),其中,通过确定地表一点为原点,以向东方向为x轴,向北方向为y轴,以时间t为竖直向上的z轴,建立三维直角坐标系,以该三维直角坐标系作为时空坐标系。
11.作为本发明面向任务的多维度效能评估方法,进一步地,基于最短时间代价通过路径搜索来求解时空棱镜,基于求解的时空棱镜获取任务活动可到达时空范围,其中,时空棱镜包含:用于描述任务活动应当避免时空区域的危险逃逸时空棱镜及用于描述可到达时空区域的可达域时空棱镜,利用可达域时空棱镜和危险逃逸时空棱镜两者所表示时空区域范围的差集来评估预测任务活动可到达时空范围。
12.作为本发明面向任务的多维度效能评估方法,进一步地,在随时间连续变化环境中,假设每个可能在越野途中经过的空间点均由一个最早到达时间和最晚停留时间构成该途径点在时空坐标系中的最早到达时空点和最晚停留时空点;所有可能途径点的最早到达时空点和最晚停留时空点分别构成连续的用于描述未来和过去时空面的下和上棱锥形时空表面;将起始时空点作为下锚点、到达时空点作为上锚点,以下和上棱锥形两个时空表面
作为边界面,两边界面之间的时空区域作为所求解的用于表示能够按时完成任务的越野者可能出现的时空范围的可达域时空棱镜区域。
13.作为本发明面向任务的多维度效能评估方法,进一步地,针对可达区域的预测评估,将起始时空点作为下锚点、到达时空点作为上锚点,以起始时空点开始,计算任务执行时可能经过的每一个空间点的最早到达时间,利用这些最早到达时间相应的时空点来形成可达域时空棱镜的下棱锥边界面;以到达时空点开始,反向计算在能够准时到达终点的前提下,任务执行时可能经过的每一个空间点能够停留的最晚时间,利用这些最晚时间相应的时空点形成可达域时空棱镜的上棱锥边界面;针对获取的上、下棱锥边界面,通过交集运算来获取通过可达域时空棱镜表示的目标时空范围。
14.作为本发明面向任务的多维度效能评估方法,进一步地,危险逃逸时空棱镜区域按照时间及影响时空范围划分为用于描述危险事件发生时空范围的发生区、用于描述因活动能力受限不可能逃离危险事件波及时空范围的波及区,及用于描述因活动能力受限如果没有经历危险事件不可能到达时空范围的真空区,其中,波及区的下时空边界、发生区的除上下边界以外的时空边界及真空区上时空边界三者一起分割出一个闭合时空区域,利用该闭合时空区域作为用于表示完成任务必须躲避或因危险事件无法到达的时空区域范围的危险逃逸时空棱镜,危险逃逸时空棱镜下锚点是危险事件开始时刻的时空边缘,上锚点是危险事件结束时刻的时空边缘。
15.作为本发明面向任务的多维度效能评估方法,进一步地,危险逃逸时空棱镜求解中,上下边界面均位于危险事件发生的空间范围内,其中,下时空边界面求解时,从危险事件发生的时刻开始,以环境允许的最大速度和最优路径并以危险事件的空间边缘为目的地,向过去反向推算危险事件范围内所有空间点能够脱离危险的最晚出发时间,对应的时空点即构成连续的棱锥形时空表面,该棱锥形时空表面即为用于表示越野者所处时空低于该时空面时能够逃离即将发生的危险事件的危险逃逸时空棱镜的下时空边缘;上时空边界面求解时,从危险事件结束的时刻开始,以环境允许的最大速度和最优路径并从危险事件的空间边缘向内行驶,向未来正向推算危险事件范围内所有空间点在危险事件结束后能够到达的最早时间,对应的时空点即构成连续的棱锥形时空表面,该连续的棱锥形时空表面即为用于表示当前越野者如果没有受到过危险事件影响必然不可能出现在该时空面之下的危险逃逸时空棱镜的上时空边缘。
16.作为本发明面向任务的多维度效能评估方法,进一步地,在时空体素中向未来或过去推算时空边界面时,建立开放列表和已定列表,将点状锚点,散列多点状锚点,线状锚点,以及面状锚点边线附近位于空间栅格中心的时空点直接加入已定列表,将位于面状锚点内部位于空间栅格中心且时间在面状锚点附近的时空点也加入已定列表,对现有已定列表四周临近的空间栅格中心点进行最短时间代价评估,将评估后形成的时空点添加至开放列表;从开放列表中查找时间最早的时空点加入已定列表,采用路径搜索算法依据此点向空间临近的八个方向搜索,更新开放列表中临近时空点的最早到达时间,或评估未评估的空间栅格中心并加入开放列表,再次查找开放列表中时间最短的时空点加入已定列表,依此循环,直至计算出每个空间栅格中心的最早可能到达的时间;计算空间栅格中心位置的最晚停留时空点时,从开放列表中具备最晚停留时间的时空点开始,反向搜索每个空间栅格中心的最晚出发时间。
17.作为本发明面向任务的多维度效能评估方法,进一步地,在时空体素中向未来或过去推算时空边界面时,建立开放列表和已定列表,将点状锚点,散列多点状锚点,线状锚点,以及面状锚点边线附近位于空间栅格中心的时空点直接加入已定列表,将位于面状锚点内部位于空间栅格中心且时间在面状锚点附近的时空点也加入已定列表,对现有已定列表四周临近的空间栅格中心点进行最短时间代价评估,将评估后形成的时空点添加至开放列表;从开放列表中查找时间最早的时空点加入已定列表,采用路径搜索算法依据此点向空间临近的八个方向搜索,更新开放列表中临近时空点的最早到达时间,或评估未评估的空间栅格中心并加入开放列表,再次查找开放列表中时间最短的时空点加入已定列表,依此循环,直至计算出每个空间栅格中心的最早可能到达的时间;计算空间栅格中心位置的最晚停留时空点时,从开放列表中具备最晚停留时间的时空点开始,反向搜索每个空间栅格中心的最晚出发时间。
18.作为本发明面向任务的多维度效能评估方法,进一步地,时空棱锥求解中,将相邻空间栅格中心之间运动的时空轨迹作为连接当前时空点和目标空间栅格中心,且首尾相接的多个时空直线段构成的连续时空轨迹;每一时空直线段处于不同时空体素中,且除当前时空点和目标空间栅格中心外,每段的时空起始点和结束点为时空轨迹传入和穿出时空体素的时空坐标;时空轨迹追踪按序依次根据上一次穿出时空体素的时空坐标作为下一段时空直线段运动的时空起始点,结合空间移动方向、时空体素时空范围及在时空体素内按特定方向行驶的最大速度计算穿出时空体素时的时空坐标,直至在空间上到达目标空间栅格中心。
19.作为本发明面向任务的多维度效能评估方法,进一步地,在栅格化的时空体素环境中,设定任务执行方案起始和达到的时空坐标,依据进入时空体素和穿出时空体素的时空点构造直线段来获取任务执行方案的时空轨迹;利用模型中任务执行进入或穿出时空体素时空点的时空坐标来获取时空轨迹上途经每个时空体素内行进长度和停留时间,通过时空轨迹经过的各时空体素代价增长率及对应时空体素内停留时间、和行进长度来获取任务执行方案的综合环境代价;并采用时间段进行分层路径查找,从可到达域内部第一个计算时间段开始计算,以该时间段内可到达域下边界上各节点或上一个时间段的目标体素中心点为起点,计算满足当时速度条件下节点到该时间段目标体素中心点的备选时空路径;评估位于当前计算时间段的每个目标体素中心点连接的多个备选路径,仅保留其中一条累积综合威胁代价最小的路径,抛弃其它备选路径,结合相应起点的最小综合威胁代价评估到当前目标体素中心点的最小累积综合威胁代价;如果当前时间段计算中,可到达时空域包含时空棱镜上边界,则将上边界上各节点作为目标体素中心点参与计算,并评估从上边界相应节点至最终目标点的总体累积综合威胁代价;进入下一计算时间段,直至完成可到达域内的所有计算;找出所有到达越野终点路径的累积综合威胁代价最小的一条路径作为最优路径,以该最优路径获取最小威胁程度代价对应的在可行方案时空范围内的最优执行方案。
20.作为本发明面向任务的多维度效能评估方法,进一步地,在栅格化的时空体素环境中,基于任意相邻两时空节点之间的直线移动消耗时间,从任务执行方案起点到目标点之间的时空轨迹通过路径搜索来获取起点到目标点之间直线移动时间消耗最少的时空轨迹,以该时空轨迹获取最短时间代价对应的任务对环境的适应程度。
21.本发明的有益效果:
22.1、本发明针对传统方法对风险事件的分析和表达研究不足的问题,对任务中的态势和环境风险进行了分析和分类,认为任务执行过程中的风险主要分为可以承担的一般性风险,无法承担的规避性风险,和影响任务方案时空容差能力的可靠性风险。针对这些风险的表达和评估问题,通过对风险事件的时空表达、可靠性风险和规避性风险的概念与评估,风险事件特别是短期风险事件的表达和评估构建形式统一的数学模型作为效能评估框架中的时空综合环境影响模型来描述任务时空环境影响因素随时间发生连续变化,能够科学准确认识和分析评估任务在复杂、多变、多因素的动态环境中表现情况。
23.2、针对传统基于gis的空间任务规划分析中通常忽略某些代价随时间累积的问题,利用代价在时空中的累积规律,所有的规划行为均应当充分考虑在时间中的代价累积和空间中的代价累积。利用时间累积型代价和空间累积型代价及任务方案在时空中的代价计算,实现在针对越野分析问题进行评估的过程中,通过最短时间代价与综合威胁程度代价两种时空代价指标,为实现时空一体的越野规划奠定基础。
24.3、针对环境综合影响规律在时间和空间中均可能发生不规则变化的问题,以时空体素的方式表达环境综合影响,构建基于时空体素的环境综合影响模型,并在这个影响模型中实现了针对越野任务方案的时空代价评估,其中,该模型能够表达环境和态势连续变化的影响,能够统一表达环境、态势、能力及其他因素的影响下在局部执行任务时的代价发生和累积规律,其对时间和空间代价的统一表达,能够灵活利用时间差解决空间问题并取得时空最小代价的基础。
25.4、针对传统最小代价路径规划算法难以体现连续变化环境影响的问题,以基于时空体素的环境综合影响模型为基础,利用可预测环境的最短时间路径规划,能够充分体现连续变化环境对越野行动的影响,与传统基于空间的分析相比,评估结果更加贴近实际情况,规划方案总是能够取得更加低的综合代价,且计算量与传统算法相当。
26.5、在连续变化环境的时空中进行针对越野的可到达域研究,以基于时空体素的环境综合影响模型为基础,针对规避危险事件的规划需求,利用危险时空棱镜并结合其它方法对战场态势进行时空预测,然后通过时空棱镜方法对越野机动可到达时空域进行评估。实验结果表明,这种针对越野任务的时空可到达域评估方法能够体现来自环境、态势、能力与生物习性、任务特点等多方面因素的影响,评估结果能够非常直观地反应任务的活动时空范围、整体适应能力、风险分布、关键事件节点等多种重要因素,适合针对任务的整体性表现分析。
27.6、针对传统基于空间gis的分析方法无法体现代价在时间中的累积问题,与无法实现时空一体的路径规划问题,通过在连续变化时空环境中进行最小综合代价路径规划。通过大量实验证明,本案方案相关算法能够体现连续变化的环境、态势、能力与生物习性等综合因素的影响,支持空间重叠和交叉的路径,能够巧妙利用时间差解决空间冲突问题,能够支持偏好各异的各类任务,适合复杂的时空路径规划。
28.7、本发明通过构建环境综合影响模型,能够充分体现环境和态势随时间的连续变化,能够充分利用空间活动的时间差解决空间冲突问题,任务的效能计算结果体现了时间与空间的统一;强调将战场态势、参与各方的能力和生活习性等均作为与环境影响同等重要的因素,计入对任务的综合影响规律,实现更加贴近实战的环境影响效能评估;强调多层
次、多角度、全方位的评估。效能评估不是对任务某一方面表现的评价,而是对任务在环境影响下多角度,全方面的评价,是一个反复的过程,是一个从具体的低层次认知逐步到上升到抽象的高层次认知的过程,采用多个角度对任务效能进行评估,实现了对任务在环境影响下表现能力的全方位评估,包括对任务在某些方面的极端表现进行评估,对任务活动的时空范围进行评估,以及对任务的最佳综合表现进行评估,体现了对任务各个层次全方位的认知,以达到任务执行中的科学、有效制定策略的目的,降低计算设备运行负荷及复杂度低,提高模型评估效率高,具有较好的应用前景。
附图说明:
29.图1为实施例中面向任务的多维度效能评估流程示意;
30.图2为实施例中时空综合环境影响因素示意;
31.图3为实施例中移动物体时空轨迹和静止物体时空轨迹示意;
32.图4为实施例中时空坐标系示意;
33.图5为实施例中时空路径与时空棱镜空间示意;
34.图6为实施例中栅格化处理后的时空环境模型示意;
35.图7为实施例中时空轨迹计算流程示意;
36.图8为实施例中危险逃逸时空棱镜结构示意;
37.图9为实施例中时空棱镜下边界面计算流程示意;
38.图10为实施例中时空棱镜上边界面计算流程示意;
39.图11为实施例中危险逃逸时空棱镜上下棱锥面计算流程示意;
40.图12为实施例中时空路径搜索节点的待选时空路径区域示意;
41.图13为实施例中空间轨迹可重叠或交叉示意。
具体实施方式:
42.为使本发明的目的、技术方案和优点更加清楚、明白,下面结合附图和技术方案对本发明作进一步详细的说明。
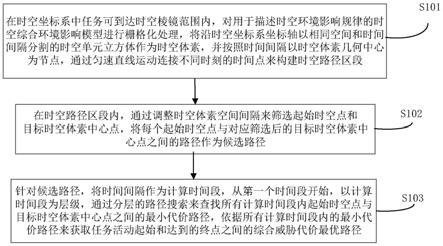
43.本发明实施例,提供一种面向任务的多维度效能评估方法,参见图1所示,包含:
44.s101、构建任务在环境影响下的多维度指标的效能评估框架,该效能评估框架基于面向任务的时空综合环境影响模型实现,其中,综合环境影响模型采用在时空坐标系中记录综合环境随空间位置及时间连续变化用于量化环境对任务影响的函数模型,多维度指标包含:基于综合环境影响模型以达成任务的最短时间为指标来评估任务对任务极端表现能力、预测评估因环境和态势影响形成的任务活动应当规避时空区域边界,评估在环境能力和态势影响下任务活动可到达时空区域范围,及在环境综合影响下任务活动的最佳表现;
45.s102、对时空综合环境影响模型进行栅格化处理,沿时空坐标系坐标轴以相同空间和时间间隔将时空分割为时空单元立方体,将时空单元立方体作为时空体素;
46.s103、将任务执行方案已确定时空坐标的起点和目标点作为锚点,利用时空轨迹追踪算法来预测任务执行对象沿空间直线运动中直线段在时空中的最短时间代价;基于最短时间代价通过路径搜索来求解时空棱镜,基于求解的时空棱镜获取任务活动可到达时空
范围,并基于空间轨迹可重叠或交叉原则在不同时间段的任务活动可到达时空范围区段中以综合威胁代价最小为目标搜索出时空环境中任务活动最优路径;
47.s104、基于任务活动的可到达时空范围、任务对环境的适应程度及在可行方案时空范围内的最优执行方案对任务时空环境影响效能进行多维度评价,其中,任务对环境的适应程度通过任务在环境下发挥的最短时间代价来获取。
48.对任务效能的评估本质上是对任务执行方案预期效果的评价,其受到环境、态势和能力的综合影响,而后三者又会随着时间发生连续变化。影响效能的各因素中环境最为根本。环境可能限制可行方案的选择范围,影响任务的执行效果。能力也是影响任务效能的主要原因之一,不同的任务承担者在环境中受到各自能力的制约,会导致相同方案的执行效果出现较大差异。但能力的影响不能抛开环境讨论,同样环境的影响也不能抛开能力因素孤立地评估。态势不一定存在,但如果存在,其对任务的影响是巨大的。但态势并不孤立地对任务产生影响,其影响效果还受到环境因素和能力因素的制约。时间是贯穿环境、态势和能力变化的唯一主线,是任务执行时环境连续变化的统一变量。本案实施例中,从对任务的极端表现、因环境和态势形成的规避时空区域、任务活动可到达时空域范围及任务最小综合代价四个方面对任务效能进行全面评估,利用时空代价累积速率在局部、整体、低层次和高层次中交替进行评估,能够从各个角度对任务在环境影响下的极端表现能力、整体适应程度和最优结果做出评价,模型求解复杂度低、效率高,便于决策者做出较科学、合理的任务执行策略,便于实际场景中的应用。
49.作为本发明实施例中面向任务的多维度效能评估方法,进一步地,时空综合环境影响模型表示为函数随时间t连续变化的环境变量e(t)、态势变量s(t)和能力变量p(t)的数学模型f=m(e(t),s(t),p(t)),其中,通过确定地表一点为原点,以向东方向为x轴,向北方向为y轴,以时间t为竖直向上的z轴,建立三维直角坐标系,以该三维直角坐标系作为时空坐标系。
50.与每种任务相关的环境因素都有很多,每种环境因素均可标记为以时间为自变量的连续变化函数或常数函数environment(t),假设在时间区段t=[t1,t2]执行的任务共考虑n种可能影响任务执行的环境因素,如公式(1)所示,相关的环境变量可以表示为集合e(t)。同样的,相关的态势因素situation(t)和能力因素power(t)可以分别表达为公式(2)和(3)。特别的,此处s(t)是态势的原始信息,不包含结合环境和能力因素对于态势的细节推断。
[0051]
e(t)={environment1(t),environment2(t),...,environmentn(t)|t∈t}
ꢀꢀꢀ
(1)
[0052]
s(t)={situation1(t),situation2(t),...,situationm(t)|t∈t}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0053]
p(t)={power1(t),power2(t),...,powerk(t)|t∈t}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0054]
若以f表达任务在环境综合影响下的能效,那么显然,f是随时间t连续变化的环境e(t)、态势s(t),和能力p(t)的函数,f的数学模型可以表达为公式(4)。其中,对于不同的任务,由于任务实施中,风险和收益的偏好类别,评估方法可能差异很大,其评估函数m(x,y,z)也应当不同。
[0055]
f=m(e(t),s(t),p(t))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0056]
公式(4)是对效能评估变量和依赖关系的总结。面向任务的时空环境影响效能评估概念模型可如图2所示。任务的环境影响效能来自于环境、态势和能力的共同作用,是关
于时间t的函数。不同的任务的效能评估方法差异很大,需要具体进行分析。。
[0057]
时空域内的代价累积速率利用时空矢量表示,利用代价累积速率分析任务时空综合代价增长率分布和变化规律,以评估任务对应范围内的活动代价,其中,代价累积速率是一种时空矢量,包含时间累积速率(时间分量)和空间累积速率(空间分量)。对任务的环境影响效能评估可以通过评价实施方案的效果来实现。但不同的实施方案具有不同的代价或收益,单个方案的表现会受到方案规划水平的影响表现出较大差异,不能代表任务的效能,环境影响效能应当是不包含方案本身优劣程度的,对任务整体受到环境影响程度的评价。而可行方案的时空范围,极端方案和综合最优方案的表现,在一定程度上能够代表环境对任务的整体影响,可以作为环境影响效能评估的指标。例如对于越野问题来说,极值问题有:最早什么时候到,最晚什么时候出发等。此类极值问题能够评价任务在相应环境下发挥程度的极限。边界问题是对极值问题的一般性扩展,如在能够完成任务的前提下,可能到达哪些时空区域,每个途径地点的最早到达时间和最晚离开时间等,这些边界问题给定了实施方案的时空范围,可以从整体上评价任务对环境的适应程度。而最优问题则是在上述可行范围内选择最优方案,使得代价最小或则收益最大,这与任务的特点紧密相关,表达了最佳选择下任务对环境的适应程度。无论是极值问题、边界问题还是优化问题,每种评价的背后都有支撑该值的具体方案,也就是说,面向任务的时空环境影响效能评估的过程就是不断规划能够代表这些极值问题、边界问题或最优问题的具体方案,并对方案的表现加以评估。环境效能评估的过程可以转化为大量任务规划的过程。
[0058]
效能评估的关键是科学地量化和表达环境对任务的影响。在传统最小代价路径中,一般采用空间二维的相对代价表面(relative cost grid)或摩擦表面(friction surfaces)等概念来表达局部环境代价的在空间中的分布情况,再通过沿方案路径累积这些代价来实现对整个方案的评估。本案实施例中,通过最小代价规划的时空环境影响效能评估框架,也是通过对代价累积分析来实现方案效能的评价。具体可包含如下内容:建立时空环境影响模型,通过认识各种局部代价或收益的发生和累积规律,并将这种规律表达为能够正确评估任意方案代价的时空环境综合影响模型;在时空环境综合影响模型的基础上,通过最小代价方案搜索实现对任务的效能评估,在可行的时空域进行搜索,找到各类代价的最小代价方案,并通过方案的表现对任务的效能做出评价。
[0059]
对局部时空环境的评估主要目标是正确表达环境的“代价”(收益的可以通过一定方法转换为“代价”)随时间和空间的发生速度及条件,这个分析过程即为时空代价微分过程。代价是一种可累积的概念,即代价的总量会随着人类活动逐步累积,这种累积的过程可以看作在连续变化环境中对代价进行积分的分析过程。
[0060]
代价有很多种,每种代价对应一种或多种效能评估类型(比如最短时间消耗代价,对应于最短时间路径分析和可到达域分析;综合威胁程度代价,对应于时空最优路径规划方法)。传统算法主要关注随着空间活动累积的代价,本案实施例中认为除此之外,还有随着时间累积的类型,而对于时间和空间两者都有关的代价类型,可以分解为时间相关的部分和空间相关的部分。
[0061]
时间累积型代价:累积的过程仅与活动时间长短有关的代价,比如在易暴露区被发现的代价,仅与在该区域停留的时间有关;
[0062]
空间累积型代价:累积的过程仅与活动空间大小有关的代价,比如穿越地雷区域
的风险代价,仅与穿过雷区的距离有关。其中,空间的概念针对不同的任务类型具有不同的含义,对于路线规划任务来说主要指行动方案中路线在空间上延展的长度;而对于时空选址类任务来说主要指所选择的二维平面面积,或三维空间体积。
[0063]
由于环境分布不均匀,各处时空的代价累积速率不同。在时间维度上,由于时间的流逝是不可逆的,与时间相关的代价累积速率不存在方向的区别;而在空间维度上,有的代价累计率与方向有关,比如由于坡度影响导致的行驶时间代价在各个方向上不同,而有的代价又与方向无关,比如低温带来的风险代价。记在某时空位置的代价累积速率用时空矢量来表示,如定义式(5)。其中,分别表示其时间累积率和空间累积率,根据不同代价类型的特点可能为有向变量也可能为无向变量。本案实施例中,为便于统一描述形式,可将无向变量看作各向同性的有向变量,均用有向变量符号来表达。
[0064][0065]
上述“综合代价增长率”的评估目的不是具体的累积速率“值”,而是代价累积速率的“变化规律”。这是由于的变化不仅与局部时空的环境、态势、能力和任务类型有关,根据代价类型不同,还与不同的参数有关,如越野的历史轨迹、行驶方向、更低层次的效能分析的结果等等。设i1,i2,...,in为评估所需的参数,那么在时空坐标(x,y,t)处,可以表达为时空位置和相关参数的函数公式(6)。通过时空坐标可以查询到环境、态势和能力信息,其它参数与代价类型有关,需具体分析。
[0066][0067]
在掌握任务的时空综合代价增长率分布和变化规律后,即可对任务在局部活动的代价做出评估。如公式(4)和公式(7)所示,以越野机动任务为例,参见图3所示,沿时空轨迹lm移动时,在pa处的代价值应为pa处的时空综合代价增长率和时空轨迹之积。公式(7)是公式(4)在局部时空的体现,能够描述任务执行过程中局部代价的发生和累积规律,也可称为局部时空代价的微分公式。
[0068][0069]
任务实施方案整体代价的求解过程可以看作是代价累积速率按照方案在时间和空间的积分。以微分公式(7)为基础,任务沿lm的总体时空代价w为积分公式(8)。图4所示,该公式适用于沿任意时空轨迹移动的方案,其中,在静止物体的时空轨迹ls上,由于始终为0,其最终只有时间累积性代价值。
[0070][0071]
假设任务可行方案集为solutions={l1,l2,...,ln,...},对k种效能指标进行评估时,k个代价增长速率集合为pricerates={w1,w2,...,wk},则对应的方案代价矩阵表示
为为表示第n种可行方案的第k种累积代价值,w
wk
表示第k种累积代价。进一步地,根据任务类型及领域相关规划方法,通过评估每种代价的极端取值、取值范围,及综合最小代价等效能评估指标来对任务进行效能评估。
[0072]
根据评估的需要,代价可以有很多种定义,每种代价类型结合多种评估方法可以评估多个任务效能指标。当确定代价的形式后,通过公式(8),即可评估该种代价在任意方案中的累积值,即可对任意方案的总体代价进行评估,以越野路径规划为例,理论上可行方案集包含无数种方案solutions={l1,l2,...,ln,...},如果对k种效能指标进行评估,将对应k个代价增长速率的集合pricerates={w1,w2,...,wk}(其中w1,w2,...,wk中可能有部分是相同的,这是由于即使相同的代价类型,配合不同的评估方法也可获得不同的效能指标),能对每个方案计算出k种不同的代价,形成公式(9)所示代价矩阵。
[0073]
效能评估的实质即是通过公式(9)分析任务的极端表现、一般表现或最佳表现。其中,极端表现可以通过找出这些代价矩阵里每种代价类型可取得的最小代价来评估,如以y=min(x)函数表示取最小值,极端表现可按公式(10)计算;一般表现可以通过找出矩阵里每种代价的一般性指标(比如取值范围、平均值等)来评估,如以[y1,y2]=r(x)函数来表示取值范围函数,代价取值范围可按公式(11)计算;最佳表现则需要综合各类代价,形成统一的评估体系,如果用公式y=m(x1,x2,...,xn)表示对多个类型代价进行综合的函数,m表示最小综合代价值,最佳表现可以按照公式(12)计算。
[0074][0075][0076][0077][0078]
公式(9)至公式(12)说明本案实施例中通过最小代价规划的时空环境影响效能评估的理论依据,公式(10)、(11)、(12)均是公式(4)的具体实现方式,这三个公式通过公式(6)够包含环境e(t)、态势s(t)、能力p(t)信息以及任务特点,最终实现效能的评估。实际计算中应当根据任务类型,采用领域相关的规划方法搜索每种代价的最小代价方案。以越野
机动为例,与传统基于gis方法的越野分析比较,本案实施例方案,能够注重对环境连续变化的统一表达,评估结果需要体现环境的连续变化的影响;且代价的累积的过程不止在空间中进行,也包含在时间上的代价累积,使得方案规划的过程也不止于在空间中进行,是时空一体的规划,评估结果体现态势和能力在环境评估中的作用,也能够体现不同任务带来的效能评估差异。其次,本案方案中的效能评估过程不是一步完成的,而是在局部与整体、低层次认识到高层次认识中交替进行的,能够从各个角度对任务在环境影响下的极端表现能力、整体适应程度、和最优结果做出评价,利用评估模型进行求解分析,便于辅助任务执行策略执行,提升效率。
[0079]
时间地理学是是一种理解人类、自然和技术之间相互依存关系的普遍方法,其一般在一个包含n维的空间与1维的时间的概念坐标系下进行研究,时间与空间是正交的,个体的活动在时间维上是单向不可逆的。时间地理学基本要素是时空路径和时空棱镜。时空棱镜问题研究的是人类活动的边界问题,即一段时间范围内,人类移动速度受环境影响下,能够出现的最大的时空范围。在越野活动中研究时空棱镜可以从整体上对越野可到达性进行评估,分析越野活动可能出现的时空范围大小,关键点,时空容差能力等一系列问题,从而达到从整体上对任务效能进行评估的目的,科学、合理、有效,更加贴近实际应用环境。
[0080]
为统一表达空间环境随时间的动态变化,时空综合环境影响模型建立于图4所示的时空坐标系,以记录任意时空的环境影响规律,图4中(a)表示二维空间的时空坐标系,(b)表示三维空间的空间坐标系,两种坐标系均是三维坐标系,但坐标含义完全不同。二维空间的时空坐标系定义与时空地理学中类似坐标系一致。为统一表达空间环境随时间的动态变化在研究地面越野问题时,本案实施例中,进一步地,环境综合影响模型表示为:在时空坐标系中任意位置(x,y,t)记录环境综合代价的时空代价增长率以记录在空间点(x,y)处t时刻环境、态势、能力对任务执行的代价累积的速度变化率。的含义与“代价”的定义有关,对于最短时间规划而言,是移动单位距离所需的最少时间,即最短时间消耗代价率而对于路径综合代价分析而言,是时空综合威胁代价率
[0081]
如图5所示,一个静止物体的时空轨迹在时空坐标系中可以表示为一条与时间轴平行的直线(如ls);一个连续移动物体的时空路径呈现为连续的曲线(如lm);时空点p
′
start
与p
′
end
之间的时空区域u称为由出发时空点和到达时空点p
′
end
确定的时空棱镜,表达移动的对象在这段时间内可能出现的时空范围,p
′
end p
′
start
分别称为时空棱镜的上下锚点;ppa是potential path area的缩写,代表了在时间预算内个体可能出现的空间范围。如果pa(xa,ya,ta),pb(xb,yb,tb)两点之间为匀速直线运动,其速度的计算公式为:
[0082][0083]
该值正好是lm与空间面的斜率,斜率值越小代表在空间中移动的速度越快。如ls所示,如果一个对象如果是静止的,那么它应当呈现为一条平行于时间轴的直线。时空棱镜对可到达性的表达主要基于这样的原理:如果从出发的时空点处,以任意不超过最大速度的时空轨迹能到达的时空区域记为n;以任意不超过最大速度的时空轨迹行进,能在规定时间前到达终点的区域所可能经过的时空区域记为r,则如下所示:
[0084]
u={(x,y,t)|(x,y,t)∈n∩(x,y,t)∈r}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0085]
锚点p
′
start
与p
′
end
确定的时空棱镜u是即满足在指定时刻从指定起点出发能到达的时空,又满足能在另一指定时刻之前到达终点的时空。其反映了个体在起点、终点和一定的时间预算内旅行和活动的可能性。时空棱镜所表达的时空区域就是本案研究的可到达时空区域,不在该范围的时空区域受时间预算,环境影响和规则限制,或不可能从起点到达,或不可能按时到达终点。
[0086]
任务沿lm的总体时空代价适用于沿任意时空轨迹移动的任务执行方案。通过总体时空代价公式进行积分,即可获得相关环境代价,但环境在时间和空间的变化都是非规律的,实际运算过程中存在困难。为此,本案实施例中,通过对时空环境进行栅格化处理,如图6所示,沿着x-y-t三轴分别以相同的空间和时间间隔将时空分割为时空单元立方体(时空体素,简称体素)。近似地认为在同一个时空单元中环境综合代价的时空增长率是一致的。栅格化过程中的环境隶属问题可设定为:在空间上,栅格化后的环境隶属于为对任务影响最大的一部分的环境,在时间上,环境的状态隶属于体素所在几何中心的环境状态。表达的是代价累积的时空速率,除了与时空环境有关外,还可能与其它因素有关,如任务执行中的行驶方向,历史轨迹等。故即使环境栅格化后,也不一定是一个数值,而是代表一种代价累积规律。
[0087]
理论上,对环境影响的认识过程就是对每个体素的计算过程。但事实上对考察时空区域内所有体素的都进行一遍计算是不现实的,且进行如此巨量的环境评估开销是巨大的,会导致计算过程中的爆炸问题。针对这个问题,本案实施例中,可利用时空轨迹,即在评估过程中用到哪个体素生成哪个体素,用多少,环境评估多少。
[0088]
离散化的意义在于简化复杂的变化规律。当栅格化的时空间隔大小合适时,可近似地认为在其所代表的时空内环境相似,其所有代价规律也一致。如图6所示,若(x0,y0,t0)为图示绿色体素的几何中心点,w
′
(
·
)为代价w(
·
)在体素内的近似表达,那么w近似可用如下公式表示:
[0089][0090]
基于时空综合环境影响模型对任务执行方案代价进行评估,首先需要获取已知方案会穿过哪些时空体素,以及在每个时空体素中停留的时间长度和移动的空间距离,此过程即为移动轨迹的时空追踪过程。在时空环境综合影响模型中的移动可以看作连续的若干段直线运动,任何复杂运动轨迹都可以通过这种方式逼近。如图7所示为一段时空中从时空点s至时空点e的直线运动,图中绘制出一部分体素a0,b0,b1,其中,a0,b0空间相邻时间一致,b0,b1空间一致时间相邻。时空点s为空间点a在其时空轨迹la上的一个时空点;时空点e为空间点b在其时空轨迹lb上的一个时空点。假设任务执行方案从s出发以沿图示时空轨迹,途经时空点m0,m1到达e。具体方案中各直线段端点的时空坐标是已知的(如图中s,e的时空坐标是已知的),相应这一段任务行程的行驶速度和方向就已知,如果再求出每个进入或穿出体素的时空点的时空坐标(如图中m0,m1的时空坐标),即可求出时空轨迹在途径的每个体素
(如图中a0,b0,b1途径的三个体素)内的行进长度和停留时间。
[0091]
具体模型求解计算时,行驶方向i可通过a,b的空间坐标利用公式i=arctan((y
b-ya)/(x
b-xb))计算出来,该值在这两点之间的各个体素移动时均不会变化,在x,y轴方向的速度根据方案可得。设upper(x),floor(x)分别为向下和向上取整函数,可定义forward(x),backward(x)分别为向后和向前取整函数,记x,y,t轴的栅格间隔分别为d
x
,dy,d
t
,设在第j个时空体素内开始移动时的坐标标记为(xj,yj,tj),在该体素内最大剩余移动时间和体素的几何中心坐标可表示为:
[0092][0093]
在这段时间内,不考虑体素的空间边界的情况下,在x,y轴方向最大行驶距离分别为不考虑时空体素时间边界的情况下,在x,y轴方向最大行驶距离分别为如不考虑其它轴,记分别从t轴,x轴,y轴穿出的最短时间分别为对应公式为对应公式为那么最早穿出时间δtj表示为轴向为最短时间对应轴向。
[0094]
完成以上计算后,如果and则说明穿过第j个体素中没有到达终点,将继续移动进入第j 1个体素,进入时坐标为在下一个体素内重复上述步骤直到第n个体素能够到达终点,在这种情况下δtn被修正为并结束计算。
[0095]
通过上述方法即可完成直线段运动在体素中的追踪,获取时空轨迹进入和穿出每一个体素时的时空坐标。轨迹在体素内是匀速直线运动,即连接进入体素和穿出体素的时空点的直线段,通过上述内容即可追踪出具体越野方案会穿过哪些体素,以及在每个体素中停留的时间长度和移动的空间距离。
[0096]
假如通过移动轨迹追踪得到任务执行方案的时空轨迹将依次通过n个时空体素。记在第i个时空体素代价增长率为轨迹在该时空体素中停留了时间行进空间长度为则任务执行方案在模型第i个体素中将产生的代价wi为整个方案的总体代价w为
[0097]
作为本发明实施例中面向任务的多维度效能评估方法,进一步地,通过最短时间路径规划对任务极端表现进行评估中,基于任意相邻两时空点之间的直线移动消耗时间,从任务执行方案起点到目标点之间的时空轨迹通过路径搜索来获取起点到目标点之间时间消耗最少的时空轨迹。
[0098]
在时空环境综合影响模型中沿直线运动可以用一个函数表示。假设起点的时空坐标为(x1,y1,t),目标空间点的到达时空坐标为(x2,y2,t δt),其中δt为在两点之间移动的最短时间消耗。在大多数传统的分析方法中,δt仅与两点的空间位置有关,与t是没有关系的,即无论何时移动δt都是一样的,这个过程对应函数式δt=f0(x1,y1,x2,y2)。但这明显不符合实际情况,由于环境在不停地发生变化,不同时刻的速度是不同的,δt与起止点的地理位置(x1,y1),(x2,y2)和出发时间t都有关系,更合理的表达应当是函数式δt=f
′n(x1,y1,x2,y2,t);相应的,如果已知时间t δt,而不知t,应该用函数式δt=f
′r(x1,y1,x2,y2,t δt)。
[0099]
与传统的静态方法相比,本案方案最大的区别在于用与时间相关,替换了传统的与时间无关的δt=f0(x1,y1,x2,y2)。通过这种变化,可以有效地表达环境随时间连续变化的问题,比如遭遇恶劣气候,越野行动被迫停止,即时间代价立刻会累积到恶劣气候消失的边缘时间,随着恶劣气候消失,又回重新实现空间移动。而相反,如果采用δt=f0(x1,y1,x2,y2)描述这个过程,在数学意义上,气候状态只有一个,越野行动将永远停止,或者恶劣天气的状态将会被忽略。采用公δt=f
′n(x1,y1,x2,y2,t)或δt=f
′r(x1,y1,x2,y2,t δt)可以时刻体现环境变化对行驶速度的影响,是更加贴近实际情况的数学模型。
[0100]
传统的无道路条件下的路径搜索一般是在一个“代价”表面上采用路径搜索算法完成的。与传统最小代价路径规划不同的是,在时空环境中每一次移动所需的最小代价均与该次移动发生的时刻有关。其过程较复杂,但是依然可以通过路径搜索算法,以降低代价累积值为目标,在时空综合环境影响模型上进行路径搜索。
[0101]
如果将时空综合环境影响模型按某一时刻切分,其剖面就相当于传统算法的“代价”表面。与传统方法不同的是,每一步搜索除了计算累积代价外,还需同时累积所需的时间。代价大小可作为规划的优化目标,而时间则可用于计算下一步搜索起点的时空环境。通过迭代计算,即可采用与传统算法类似的步骤完成连续变化环境的最小代价搜索问题。计算过程中“代价”采用最短时间消耗代价即可。
[0102]
参见图8所示,左右子图分别为危险时空区域,和逃逸时空棱镜。如图所示逃逸时空棱镜结构主要分为三个部分,可定义为波及区,发生区和真空区,该三个部分合并为一个闭合的时空区域,表达了为完成任务必须躲避或因危险事件无法到达的时空区域范围。
[0103]
波及区:在此时空区域内虽然当前不受影响,但由于移动能力问题,在未来也无法逃离即将发生的危险。此区域由下棱锥将时空分为外部区域和内部区域,棱锥面上时空点所代表的时间是指在相应空间点最晚应当离开的时间,如果晚于该点则必然无法逃离“未来”将要发生的危险;
[0104]
发生区:在此时空区域内危险事件正在发生,如果此区域为规整图形则与危险时空区域完全重合;
[0105]
真空区:如果任务承担者没有受到危险事件的影响,则不可能到达此区域。此区域由上部倒棱锥将时空分为外部区域和内部区域,其内部区域危险已经消失,但是由于移动
速度限制,如果没有经过发生区是不可能出现在该区域的。
[0106]
本案方案,通过时空棱镜获取在可预测时空条件下任务执行方案中可达区域范围,利用时空棱镜来表示任务执行方案中可能出现的时空边界,便于评价任务在相应时空执行时的可行性、可靠性、时空冗余度等问题,考虑环境随时间的连续变化,不会导致大量无效计算,且运算负荷、运算输出复杂度可控,任务活动可达到时空域评估效率高,更加科学、合理。
[0107]
进一步地,在随时间连续变化环境中,假设每个可能在越野途中经过的空间点均由一个最早到达时间和最晚停留时间构成该途径点在时空坐标系中的最早到达时空点和最晚停留时空点;所有可能途径点的最早到达时空点和最晚停留时空点分别构成下和上棱锥形时空表面,分别是用于描述“未来”和“过去”的时空面;将起始时空点作为下锚点、到达时空点作为上锚点,以下和上棱锥形两个时空表面作为边界面,两边界面之间的时空区域作为所求解的用于表示能够按时完成任务的越野者可能出现的时空范围的可到达时空棱镜区域。
[0108]
对于同一点出发时空点的所有最早到达时空点呈现连续曲面,对于同一到达时空点的所有最晚出发时空点呈现连续曲面。本案申请中,针对可达区域的预测评估,将起始时空点作为下锚点、到达时空点作为上锚点,以起始时空点开始,计算任务执行方案时空轨迹中每个时空点的最早到达时间,利用该最早到达时间相应的时空点来形成可达域时空棱镜的下棱锥边界面;以到达时空点开始,反向计算任务执行方案时空轨迹中每个空间点准时到达终点的最晚出发时间,利用该最晚出发时间相应的时空点形成可达域时空棱镜的上棱锥边界面;针对获取的上、下棱锥边界面,通过交集运算来获取通过可达域时空棱镜表示的目标时空范围。
[0109]
采用可到达时空棱镜来表达可到达时空域,忽略了极端危险对可到达域的影响,尤其是在可到达域内部的突发事件,会极大影响可到达域评估范围,导致单纯用可到达时空棱镜的评估结果偏离实际。任务活动有可能受到极为危险的事件破坏,任务方案应道避免受到危险事件的影响。本案申请中,危险逃逸时空棱镜按照时间及影响时空范围划分为用于描述危险事件发生时空范围的发生区、用于描述因活动能力受限不可能逃离危险事件波及时空范围的波及区,及用于描述因活动能力受限如果没有经历危险事件不可能到达时空范围的真空区,其中,波及区的下时空边界、发生区的除上下边界以外的时空边界及真空区上时空边界三者一起分割出一个闭合时空区域,利用该闭合时空区域作为用于表示完成任务必须躲避或因危险事件无法到达的时空区域范围的危险逃逸时空棱镜,危险逃逸时空棱镜下锚点是危险事件开始时刻的时空边缘,波及区的下时空边界的意义相当于可到达时空棱镜的上边界,是一种描述“过去”的时空面,上锚点是危险事件结束时刻的时空边缘,真空区上时空边界的意义相当于可到达时空棱镜的下边界,是一种描述“未来”的时空面。
[0110]
进一步地,参见图11所示,危险逃逸时空棱镜求解中,上下边界面均位于危险事件发生的空间范围内,其中,下时空边界面(“过去”时空边界)求解时,从危险事件发生的时刻开始,以环境允许的最大速度和最优路径并以危险事件的空间边缘为目的地,向过去反向推算危险事件范围内所有空间点能够脱离危险的最晚出发时间,对应的时空点即构成连续的棱锥形时空表面,该棱锥形时空表面即为用于表示越野者所处时空低于该时空面时能够逃离即将发生的危险事件的危险逃逸时空棱镜的下时空边缘;上时空边界面(“未来”时空
边界)求解时,从危险事件结束的时刻开始,以环境允许的最大速度和最优路径并从危险事件的空间边缘向内行驶,向未来正向推算危险事件范围内所有空间点在危险事件结束后能够到达的最早时间,对应的时空点即构成连续的棱锥形时空表面,该连续的棱锥形时空表面即为用于表示当前越野者如果没有受到过危险事件影响必然不可能出现在该时空面之下的危险逃逸时空棱镜的上时空边缘。
[0111]
进一步地,在时空体素中求解未来或过去时空面时,建立开放列表和已定列表,将点状锚点,散列多点状锚点,线状锚点,以及面状锚点边线附近位于空间栅格中心的时空点直接加入已定列表,将位于面状锚点内部位于空间栅格中心且时间在面状锚点附近的时空点也加入已定列表,对现有已定列表四周临近的空间栅格中心点进行最短时间代价评估,将评估后形成的时空点添加至开放列表;从开放列表中查找时间最早的时空点加入已定列表,采用路径搜索算法依据此点向空间临近的八个方向搜索,更新开放列表中临近时空点的最早到达时间,或评估未评估的空间栅格中心并加入开放列表,再次查找开放列表中时间最短的时空点加入已定列表,依此循环,直至计算出每个空间栅格中心的最早可能到达的时间;计算空间栅格中心位置的最晚停留时空点时,从开放列表中具备最晚停留时间的时空点开始,反向搜索每个空间栅格中心的最晚出发时间。
[0112]
进一步地,时空棱锥求解中,将相应段运动的时空轨迹作为连接当前时空点和目标空间栅格中心,且首尾相接的多个时空直线段构成的连续时空轨迹;每一时空直线段处于不同时空体素中,且除当前时空点和目标空间栅格中心外,每段的时空起始点和结束点为时空轨迹传入和穿出时空体素的时空坐标;时空轨迹追踪按序依次根据上一次穿出时空体素的时空坐标作为下一段时空直线段运动的时空起始点,结合空间移动方向、时空体素时空范围及在时空体素内按特定方向行驶的最大速度计算穿出时空体素时的时空坐标,直至在空间上到达目标空间栅格中心。目标对象任务活动可到达时空范围通过任务可到达时空棱镜内但同时又在危险逃逸时空棱镜之外的时空范围来预测能够安全完成任务且可以逃避极端危险事件的可行时空区域。
[0113]
越野任务可以描述为:已知出发空间坐标、目标空间坐标、最早出发时间、最晚到达时间,要求从出发点开始,在规定时间范围内到达目标点的连续空间活动。其行驶轨迹可以表达为一个连续的空间轨迹,而这个连续的空间轨迹可以用首尾相接的、连接起点和终点的、大量较短的空间直线段来逼近。故求解轨迹最短消耗时间代价的关键在于计算时刻以环境能够允许的最大行驶速度行驶时,通过的每一小段空间直线运动的最短时间差。
[0114]
在分析每一小段空间直线段运动的时空轨迹时,已知运动起点的时空坐标以及空间直线段终点的空间坐标,该段空间直线运动必然发生在一到多个时空体素中。我们近似地认为在同一体素中环境影响一致,因此在同一体素中的最大行驶速度是相同的,如果不考虑在不同体素之间的速度突变,可以近似地将该段空间直线段运动的时空轨迹看作一个首尾相接的、连接本段空间直线段起点时空和本段空间直线段终点空间的、多段更短的时空直线段。每一时空直线段处于不同的体素中,其起点时空和终点时空正好是时空轨迹穿入和穿出体素的时空坐标。具体计算时,按照顺序,依次根据上一次穿出体素的时空坐标作为本段时空直线运动的起点时空,结合空间移动的方向、体素的时空范围、相应体素能够取得的最大行驶速度等因素计算穿出时空体素时的时空坐标,直至到达该段空间直线段的空间坐标。然后,对途径的每一段时空直线段的时间消耗求和,所得即该段空间直线运动的最
短时间消耗代价。最后对每段空间直线段的最短时间消耗代价求和,所得即越野方案的最短时间代价。
[0115]
从环境数据到最终表示的可到达区域的时空棱镜的求解中,首先根据需要对环境客观影响进行分析,综合各种环境在评估时的状态给出相应空间点的最短时间消耗率形成基于时空体素的环境综合影响模型,然后根据需要计算两点之间在某时刻开始进行直线移动的最短时间;通过最小时间代价搜索,求出时空棱镜的上下棱锥表面;并对上下棱锥求并集,该并集所表达的时空范围即是时空棱锥。
[0116]
上下棱锥面计算中,可采用dijkstra算法向空间临近的八个方向搜索的策略实现每个空间点的最短到达时间搜索。除最简单的八向临近搜索外,实施例中还可依然支持其他类型的搜索策略,比如shirabe讨的具有一定宽度的行进路线搜索策略,或saha et al.研究的跨栅格搜索策略等,具体应用可以根据需求进行更换。图9为进行下棱锥边界面计算的流程,图10为计算上棱锥面的流程,对于上棱锥面的计算可以采用反算的思路,即将终点作为开始计算的第一个点,从与之临近的点开始计算到上一点最晚出发时间,计算流程和方法与下棱锥面相似。
[0117]
计算时空棱镜的上下边界面的关键在于采用基于的时空综合环境影响模型对路径进行搜索计算。以dijkstra算法为例,分析线状锚点的计算。传统时空棱镜计算时,时空中距离起点较近的可行路径被分为开放列表和已定列表,分别指已初步确定时间代价的路径和已完全确定时间代价的路径,通过不停查找最小时间代价来逐步完成所有路径的搜索。本案实施例中,可按以下步骤完成锚点的下界面计算:
[0118]
将在线状“锚点”上的时空点全部直接加入已定列表;对线状“锚点”附近的点全部进行一次最短时间代价评估,并将评估后的临近点全部加入初始开放列表。根据需要对环境客观影响进行分析,综合各种环境在评估时的状态给出相应空间点的最短时间消耗率,形成基于时空体素的环境综合影响模型;计算两点之间在某时刻开始进行直线移动的最短时间;通过最小时间代价搜索,求出时空棱镜的上下棱锥表面,并通过对上下棱锥进行并集来获取所表达的时空范围,该时空范围即是时空棱锥。
[0119]
散列多点状“锚点”的计算与线状一致。面状锚点时空棱镜求解计算方法大部分与线状“锚点”的计算方法一致,但应避免处于面内部的点被评估。因此,在计算面状“锚点”时空棱镜之前,需先将面内的点和处于面边线的点一并加入初始的已定列表。
[0120]
环境是导致越野可达性变化的主要因素,通过路径分析手段只能对单条线路的性能进行分析,难以实现对考察区域的整体越野性能进行科学且直观的分析,但采用时空棱镜的方法研究越野环境的可达性边界可以直观地表达和分析可到达空间域、在各空间处的可行时间范围、关键节点(例如桥梁,渡河)的通过性特点等,实现对环境越野性能进行整体评估。本案方案实施例中,从两个角度对越野活动的时空范围进行评估:
[0121]
一是对于不可到达的时空区域,为避免被“未来”将发生的危险事件影响或波及不能进入的最小时空范围的边界,利用危险逃逸时空棱镜配合风险区域的时空表示对未来态势进行细节预测。
[0122]
二是通过改良的时空棱镜对任务行动在环境、态势、能力,以及任务特点的共同影响下的可到达时空域进行评估。借助危险逃逸时空棱镜的分析结果,通过评估结果能够体现任务对环境的整体适应能力。
[0123]
普通时空棱镜或危险逃逸时空棱镜均是基于体素的分析模拟,能够体现连续变化环境的影响,“锚点”不局限于时空点,可以是时空线、时空面、或则散列状多个时空点,使得评估方案更加科学性、合理性、直观性,以满足实际活动运用需求。
[0124]
通过时空棱镜获取在可预测时空条件下任务执行方案中可达区域范围,利用时空棱镜来表示任务执行方案中可能出现的时空边界,便于评价任务在相应时空执行时的可行性、可靠性、时空冗余度等问题,考虑环境随时间的连续变化,以科学的方法量化因环境和其它因素导致的代价,解决传统算法存在大量时空实际在变化的环境中是不可能到达的情形,且由于在时空棱镜内部体素的数量有限,选择的路径有限,能够有效控制计算量,评估效率更高。
[0125]
以时空棱镜对任务活动时空范围的评估是基于最小时间代价在时间和空间上的精确量化,通过路径搜索来预测评估可达时空域及任务极端表现。而本案实施例中基于最小威胁程度的最优路径,是相对最优路径,通过在栅格化的时空环境中对代价进行非量纲化、模糊的优化求解,以获取一个相对代价最小的最优路径的执行方案。
[0126]
基于最小威胁程度的最优路径的优化求解过程可描述如下:在栅格化的时空环境中,设定任务执行方案起始和达到的时空坐标,依据进入时空体素和穿出时空体素的时空点构造直线段来获取任务执行方案的时空轨迹;利用模型中任务执行进入或穿出时空体素时空点的时空坐标来获取时空轨迹上途经每个时空体素内行进长度和停留时间,通过时空轨迹经过的各时空体素代价增长率及对应时空体素内停留时间、和行进长度来获取任务执行方案的综合环境代价;并采用时间段进行分层路径查找,从可到达域内部第一个计算时间段开始计算,以该时间段内可到达域下边界上各节点或上一个时间段的目标体素中心点为起点,计算满足当时速度条件下节点到该时间段目标体素中心点的备选时空路径;评估位于当前计算时间段的每个目标体素中心点连接的多个备选路径,仅保留其中一条累积综合威胁代价最小的路径,抛弃其它备选路径,结合相应起点的最小综合威胁代价评估到当前目标体素中心点的最小累积综合威胁代价;如果当前时间段计算中,可到达时空域包含时空棱镜上边界,则将上边界上各节点作为目标体素中心点参与计算,并评估从上边界相应节点至最终目标点的总体累积综合威胁代价;进入下一计算时间段,直至完成可到达域内的所有计算;找出所有到达越野终点路径的累积综合威胁代价最小的一条路径作为最优路径,以该最优路径获取最小威胁程度代价对应的在可行方案时空范围内的最优执行方案。
[0127]
参见图12所示,在对某体素中心进行下一步路径搜索时,可以选择的时空路径区段可按照如下步骤进行构造:
[0128]
(1)以起始时空点为出发点,以整数倍体素单位时间间隔为一个计算时间段,计算该段时间内起始时空点能够到达的时空边界范围;
[0129]
(2)在起始时空点可到达的空间范围内,且在整体的越野可到达时空域内,找出所有包含目标时刻的体素,以这些体素的几何中心点作为目标体素中心点;
[0130]
(3)用时空直线(匀速直线运动)连接起始时空点至所有目标时空点,相应的连接线即从为在起始时空点进行下一步搜索时的备选时空轨迹;
[0131]
通过备选时空直线的斜率计算行驶速度和方向等信息,然后即可沿时空直线计算出途径相关体素的时空轨迹,可以近似认为在一个时空体素内的环境影响规律是不变的。
记备选路径线段h在第i个时空体素代价增长率为轨迹在该时空体素中停留了时间行进空间长度为故在第i个体素中将产生的代价如果h穿过了q个体素,且h的上一段h-1的累积综合威胁代价为d
h-1
,那么h的累积综合威胁程度代价dh按照计算。dh代表从任务活动出发点开始,途径h到达当前计算的目标体素中心点所要付出的最小的累积综合威胁程度代价。
[0132]
在进行路径搜索时,可按计算时间段分层计算。从可到达域内部第一个计算时间段开始,按照以下步骤计算:以该时间段内可到达域下边界各节点为起点,计算到该时间段目标体素中心点的备选时空路径,如本计算时间段不是第一个时间段,还应计算上一个计算时间段所有目标体素中心点到该时间段目标体素中心点的备选路径;评估位于当前计算时间段的每个目标体素中心点会有多个备选路径与之连接,仅保留其中一条累积综合威胁代价最小的路径,抛弃其它备选路径,结合相应起点的最小综合威胁代价评估到当前目标体素中心点的最小累积威胁代价;如果在一个计算时间段内,可到达时空域包含一部分时空棱镜上边界,则将上边界上各节点作为目标体素中心点参与上述计算,并评估从上边界相应节点至越野最终目标点的总体累积综合威胁代价,并记录;进入下一计算时间段,直至完成可到达域内的所有计算;找出所有到达越野终点路径的累积综合威胁代价最小的一条,即是代价最优路径。进一步地,本案实施例中,可在路径搜索中采用并行计算和/或启发式搜索,或利用空间位置掩膜对目标时空体素中心点采样或降低时空体素分辨率来增加时空体素时空间隔,以优化路径搜索计算量。
[0133]
在时空环境中搜索最优路径的原则,可基于如下三种原则来实现:
[0134]
行进速度的选取原则,以最大安全速度行驶能够最快达成任务目标,但是对于很多任务来说,最快并不等于最好。比如车辆超过经济速度后平均油耗会明显升高,而刻意降低速度行驶有时能够获得更好的经济收益;又比如当被恶劣气象条件影响时,停车等待恶劣气象条件好转后再继续行驶,能够有效降低综合风险。最小代价路径规划的目标在于降低代价。也就是说与其时刻采用最大安全速度,不如采取任何能够带来更小代价的自由速度行驶。只需坚持一个原则:实际采用的速度不能超过环境限制下的最大安全速度。
[0135]
时空路径与可到达域的关系,基于时空棱镜的时空可到达域评估为越野行动限定了可到域的时空边界,位于这个边界以外的时空区域要么以最大速度也无法到达,要么无法按时到达指定的任务目标。故无论采用什么样的时空轨迹,均不可能超过时空棱镜划定的可到达时空边界。类似的,规划的时空轨迹也不能途径任意危险逃逸时空棱镜划定的时空范围。
[0136]
空间轨迹可重叠或交叉的原则,空间轨迹重叠或交叉不是指由于立体道路网络所导致的三维欧氏空间的情况,而是指同一条轨迹的不同部分在原空间上重叠或交叉。传统基于gis的路径规划几乎遵循同一个原则:即空间轨迹不会重叠或交叉。这是由于空间轨迹交叉会导致在空间中闭合的环状路径,意味着相应区段的消耗会被认为是浪费的部分,从而导致无意义的代价升高。但特殊情况下的空间轨迹重叠和交叉是有意义的,尤其是面临复杂的现实环境。比如,任务承担者在当前空间的某一“未来”时刻有重要的事件需要完成,
但是即将发生具有严重破坏性的事件,任务承担者必须先行躲避该破坏性事件,再回来完成相关任务。规划上述任务的时空轨迹极有可能导致空间轨迹交叉,甚至是逃逸危险的路径与危险过去之后的回程路径完全重合,但这种在空间中重合或交叉的路径规划是有特殊意义的。由于任何移动都需要时间,尽管轨迹在空间坐标系中重合,如图13(b)所示,但在时空坐标系中是不可能重合的,如图13(a)所示。在时空环境中,只需关注时空路径是否避开了危险发生的时空区域,或则取得更低的代价,不必刻意规避方案轨迹在空间中的重叠或交叉。
[0137]
本案方案中,以计算达成任务的最短时间为指标,评价任务的极端表现能力。考虑的任务综合代价仅有任务在环境和能力影响下,越野的最短时间消耗代价,评估相对较为简单,与传统分析最为接近,可以形成对任务表现“点状”的认识。
[0138]
最短时间路径规划是以最大移动速度作为环境影响评估对象,以时间消耗作为优化目标,在一定时空范围内找出能够到达目的地的最短时间及相应的路径的方法,是一种典型的最小代价路径规划。本案方案中采用时刻体现环境变化对行驶速度的影响,是更加贴近实际情况的数学模型。
[0139]
因环境和态势而形成的可能对任务造成毁灭性风险的应当规避的时空区域的边界,包括因恶劣气候或地理环境造成的行动阻断区域,如危险的沼泽区域,因降雨临时形成的滑坡或塌方高风险区域;因态势造成的危险区域,如敌方的火力集中覆盖区域,已侦察确定的敌方设伏区域;任务行动不适合出现的时空区域,如隐蔽机动过程中应避免行经敌方观察哨覆盖区域,与敌方活动时空范围重复区域;其评估目标主要目的是找出时空中应当规避的时空区域的边界,可以形成对任务表现“面状”的认识,相较于最短时间评估,认知层次更高,能够对任务获得一定整体性的认知。
[0140]
在环境,能力,态势影响下,在能够完成越野机动任务的情况下,我方可能出现的最大时空范围,也属于对越野活动边界的评估。可到达时空域用于限定越野方案的时空范围,可以在一定程度上体现任务对环境的综合适应能力。进行该分析的前提是已对因环境和态势形成的规避时空区域进行了预测。在此基础上先根据我方在环境和能力影响下的最大活动范围进行分析,再排除因环境事件或态势导致的应当规避的时空区域。该评估建立于对规避的时空区域的边界的评估,也可以形成对任务表现“面状”的认识,但属于更完善的“面状”认知,能够形成对任务整体表现的完整认知。
[0141]
在环境综合影响下,兼具时间,代价,和风险的最佳路线,是一种对任务最优表现的评估。对任务在相关环境与态势的影响下的最优表现进行计算和评估是相关评估的最终目标。该项评估的前提已完成环境影响下的可到达时空域评估,在此基础上需要对于可选路线的风险和代价进行评估,在满足不超过最大速度的基础上,搜索代价和风险最小的连续路线。该项评估本质上是建立对任务的“点状”认知,但是与对极端情况等的“点状”认知不同,该项评估建立于对任务的各方面认知的基础上,是对任务表现的最高层次认知。
[0142]
本案方案通过构建环境综合影响模型,能够充分体现环境和态势随时间的连续变化,能够充分利用空间活动的时间差解决空间冲突问题,任务的效能计算结果体现了时间与空间的统一;强调将战场态势、参与各方的能力和生活习性等均作为与环境影响同等重要的因素,计入对任务的综合影响规律,实现更加贴近实战的环境影响效能评估;强调多层次、多角度、全方位的评估。效能评估不是对任务某一方面表现的评价,而是对任务在环境
影响下多角度,全方面的评价,是一个反复的过程,是一个从具体的低层次认知逐步到上升到抽象的高层次认知的过程,本案方案采用多个角度对任务效能进行评估,实现对任务在环境影响下表现能力的全方位评估,包括对任务在某些方面的极端表现进行评估,对任务活动的时空范围进行评估,以及对任务的最佳综合表现进行评估,体现对任务各个层次全方位的认知,以达到任务执行中的科学、有效制定策略的目的,降低计算设备运行负荷及复杂度低,提高模型评估效率高,并进一步在面向越野机动任务中进行验证,本案方案能够更加科学、合理地实现效能评估,具有较好的应用前景。
[0143]
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对步骤、数字表达式和数值并不限制本发明的范围。
[0144]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。