von frey法机械痛敏自动测试装置
技术领域
1.本实用新型属于动物行为学测试技术领域,涉及一种von frey法机械痛敏自动测试装置。
背景技术:
2.对于小动物的痛敏测试,尤其大鼠和小鼠的足底机械痛敏测试,von frey法是最常用的一种方法。但传统von frey法进行足底机械痛敏测试,存在如下问题:(1)纯人工操作,机械阈值的判断,有很大的主观性,利用von frey纤维丝手动刺激动物,也存在人手的差异,导致结果的标准化、客观化和可重复性不令人满意;(2)由于要将小动物置于一个笼网平台中,实验人员需要低头弯身,持von frey纤维丝向上刺激小动物足底,有的实验人员一天要进行5-8小时的相同操作,往往反映抱怨:“脖子都快断了”,以上动作对颈椎、腰椎和手臂伤害较大,尤其颈椎伤害非常严重,到后期由于酸痛疲劳,也会严重影响刺激动作的标准性和动物行为评价的准确性;(3)每只动物更换不同力度的von frey纤维丝,实验操作繁琐,且容易弄混,并且,要每一个纤维丝及时进行记录,用以判断阈值,十分枯燥,亟待自动化的方法进行改进。为此,本专利提供一种全新的自动测试装置,无需人手刺激动物,完全采取机械化方式给予客观标准的刺激强度,且无需操作员弯身低头持续工作,也无需频繁切换手中工具,及时记录,一切通过主机操作,自动刺激、自动记录,使实验结果更准确的同时,极大减轻实验人员负担。
技术实现要素:
3.为了达到上述目的,本实用新型提供一种von frey法机械痛敏自动测试装置,解决了传统von frey法进行动物足底机械痛敏测试,存在如人手操作差异、实验动作对颈椎伤害巨大、频繁更换纤维丝枯燥繁琐易出错等问题。
4.为解决上述技术问题,本实用新型所采用的技术方案是,一种von frey法机械痛敏自动测试装置,包括测痛箱和控制主机,两部分通过有线连接;所述测痛箱包括上室和下室两部分,上室是一个盒状空间,内部通过可拆卸方式包含一个测痛笼;所述测痛笼的形状为圆柱体或长方体,包括竖直笼壁和底部笼网;所述测痛笼通过测痛箱顶部开门、顶部置入的方式进入或通过测痛箱上室侧面开口的抽推方式推入;所述测痛箱上室与下室之间有一圈与测痛笼内壁固定连接的栈道形态的凸出搁板,宽度为0.5至2厘米,所述搁板围出中空,在不放置测痛笼时上室和下室完全互通;所述测痛笼通过周围竖直笼壁搁置在搁板上,且测痛笼底部笼网直接面对下室;所述测痛箱的下室是一个长方体的箱体空间,包括测痛臂和二维马达臂。
5.进一步地,所述测痛臂包括von frey纤维丝转轮、von frey纤维丝、转轮伸缩杆、红外发射器、红外摄像头、传动马达、测痛臂外壳;所述测痛臂是一个中空的横梁结构,内部水平滑动安装有转轮伸缩杆;所述von frey纤维丝转轮转动安装在转轮伸缩杆上背离测痛臂的一端;所述测痛臂的内部在靠近升降臂的近端,固定有一个传动马达,与转轮伸缩杆构
成齿轮齿条连接,用于推进或收回转轮伸缩杆,进而使von frey纤维丝转轮沿着测痛臂所指方向进退;一组所述红外发射器固定于测痛臂外壳上,数量为1-12个,分布在红外摄像头两侧,垂直向上发射红外线;所述红外摄像头固定于测痛臂外壳上,垂直向上接受漫反射红外线;所述von frey纤维丝转轮包含一个可控的转动马达,用于控制纤维丝转轮的旋转,并包含一组von frey纤维丝插槽,数量范围4至12个;一组所述von frey纤维丝包含不同克数及型号的von frey纤维丝,数量范围4至12个,所述von frey纤维丝通过螺丝口连接或磁吸式镶插连接固定于von frey纤维丝转轮的von frey纤维丝插槽上均匀分布;所述测痛臂中,传动马达、红外发射器、红外摄像头、von frey纤维丝转轮的转动马达的供电,均通过有线电线,汇集成电线组,沿测痛臂内转轮伸缩杆外的中空腔隙走线,穿入与测痛臂固定连接的二维马达臂,最后经二维马达臂的二维马达汇入二维马达的其他供电线,一起连入主板和电源。
6.进一步地,所述二维马达臂包含升降臂、升降传动马达、水平臂、水平传动马达、以及芯片主板;所述升降臂为垂直向柱状结构,内部中空,包含电线的走线;所述升降臂上端固定连接测痛臂,下端连接升降传动马达,受升降传动马达控制上升或下降,沿竖直方向运动;所述升降传动马达在相同水平位置,连接二维马达臂中的水平臂;所述水平臂是内部中空的横梁结构,内部穿梭电线的走线,受水平传动马达驱动伸缩,进而控制升降传动马达及其擎住的升降臂和测痛臂在与von frey纤维丝转轮的圆形面平行的下室截面中的底部区域左右水平运动;所述升降传动马达和水平传动马达均有外壳保护,其供电线自水平臂及保护壳中穿行,最终连入芯片主板和电源;所述二维马达臂最靠近测痛箱外部区域的末端固定安装有芯片主板,芯片主板连接测痛箱总体电源,并通过信号传输线连接控制主机。
7.优选的,所述测痛箱上室为圆柱体时,其直径与下室长方体的宽度相等;为长方体时,优选为底面为正方形,且正方形的边长与下室长方体的宽度相等。
8.优选的,所述测痛箱上室包含测痛笼的方式为顶部置入时,顶部开口通过一个重物压住盖子。
9.优选的,所述升降臂和升降传动马达之间、水平臂和水平传动马达之间均通过齿轮齿条连接。
10.优选的,所述芯片主板的固定方式包括以下两种,其一为紧密固定在水平传动马达外壳中,其二为固定于测痛箱下室的底部或侧面。
11.本实用新型的有益效果是:无需人手刺激动物,完全采取机械化方式给予客观标准的刺激强度,且无需操作员弯身低头持续工作,也无需频繁切换手中工具,及时记录,一切通过主机操作,自动刺激、自动记录,使实验结果更准确的同时,极大减轻实验人员负担。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
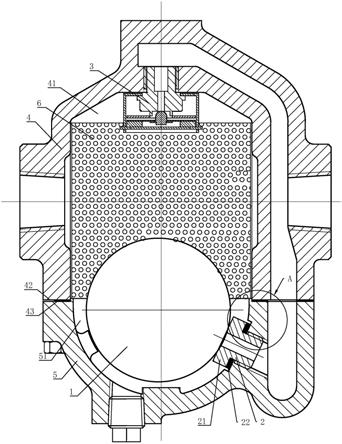
13.图1是本实用新型实施例von frey法机械痛敏自动测试装置图。
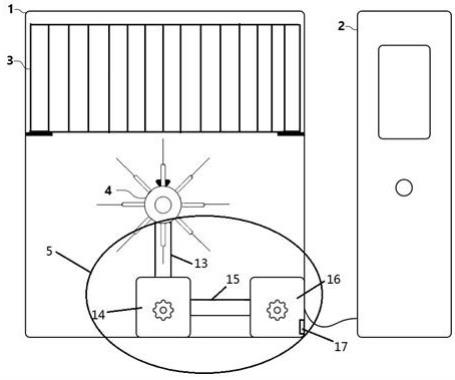
14.图2是本实用新型实施例测痛臂结构图。
15.图中,1. 测痛箱,2. 控制主机,3. 测痛笼,4. 测痛臂,5. 二维马达臂,6. von frey纤维丝转轮,7. von frey纤维丝,8 转轮伸缩杆,9. 红外发射器,10. 红外摄像头,11. 传动马达,12.测痛臂外壳,13. 升降臂,14.升降传动马达,15.水平臂,16.水平传动马达,17.芯片主板。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.如图1所示,本实用新型提供了一种von frey法机械痛敏自动测试装置,包括测痛箱1和控制主机2,两部分通过有线连接;所述测痛箱1包括上室和下室两部分,上室是一个盒状空间,内部通过可拆卸方式包含一个测痛笼3;所述测痛笼3的形状为圆柱体或长方体,包括竖直笼壁和底部笼网;所述测痛笼3通过测痛箱1顶部开门、顶部置入的方式进入或通过测痛箱1上室侧面开口的抽推方式推入;所述测痛箱1上室与下室之间有一圈与测痛笼3内壁固定连接的栈道形态的凸出搁板,宽度为0.5至2厘米,所述搁板围出中空,在不放置测痛笼3时上室和下室完全互通;所述测痛笼3通过周围竖直笼壁搁置在搁板上,且测痛笼3底部笼网直接面对下室;所述测痛箱1的下室是一个长方体的箱体空间,包括的核心组件为测痛臂4和二维马达臂5。
18.优选的,所述测痛箱1上室为圆柱体时,其直径与下室长方体的宽度相等;为长方体时,优选为底面为正方形,且正方形的边长与下室长方体的宽度相等。
19.优选的,所述测痛箱1上室包含测痛笼3的方式为顶部置入时,测痛箱1顶部开口通过一个重物盖子直接扣上,用以压住盖子。
20.如图2,进一步地,所述测痛臂4包括von frey纤维丝转轮6、von frey纤维丝7、转轮伸缩杆8、红外发射器9、红外摄像头10、传动马达11、测痛臂外壳12;所述测痛臂4是一个中空的横梁结构,其截面为方形或圆形,以圆形为优选,测痛臂4内部水平滑动安装有转轮伸缩杆8;所述von frey纤维丝转轮6转动安装在转轮伸缩杆8上背离测痛臂4的一端;所述测痛臂4的内部在靠近升降臂13的近端,固定有一个传动马达11,转轮伸缩杆8之间的连接方式为齿轮齿条连接,用于推进或收回转轮伸缩杆8,进而使von frey纤维丝转轮6沿着测痛臂4所指方向进退;一组所述红外发射器9固定于测痛臂外壳12上,数量为1-12个,分布在红外摄像头10两侧,垂直向上发射红外线;所述红外摄像头10固定于测痛臂外壳12上,垂直向上接受漫反射红外线;所述von frey纤维丝转轮6包含一个可控的转动马达,用于控制纤维丝转轮的旋转,并包含一组von frey纤维丝插槽,数量范围4至12个;一组所述von frey纤维丝7包含不同克数及型号的von frey纤维丝,数量范围4至12个,所述von frey纤维丝7通过螺丝口连接或磁吸式镶插连接固定于von frey纤维丝转轮6的von frey纤维丝插槽上均匀分布;所述测痛臂4中,传动马达11、红外发射器9、红外摄像头10、von frey纤维丝转轮6的转动马达的供电,均通过有线电线,汇集成电线组,沿测痛臂4内转轮伸缩杆8外的中空腔隙走线,穿入与测痛臂4固定连接的二维马达臂5,最后经二维马达臂5的二维马达(升降传动马达和水平传动马达)汇入二维马达的其他供电线,一起连入主板和电源。
21.进一步地,所述二维马达臂5包含升降臂13、升降传动马达14、水平臂15、水平传动马达16、以及芯片主板17;所述升降臂13为垂直向柱状结构,内部中空,包含电线的走线;所述升降臂13上端固定连接测痛臂4,下端连接升降传动马达14,受升降传动马达14控制上升或下降,沿竖直方向运动;所述升降传动马达14在相同水平位置,连接二维马达臂5中的水平臂15;所述水平臂15是内部中空的横梁结构,内部穿梭电线的走线,受水平传动马达16驱动伸缩,进而控制升降传动马达14及其擎住的升降臂13和测痛臂4在与von frey纤维丝转轮6的圆形面平行的下室截面中的底部区域左右水平运动;所述升降传动马达14和水平传动马达16均有外壳保护,其供电线自水平臂15及保护壳中穿行,最终连入芯片主板17和电源;所述二维马达臂5最靠近测痛箱1外部区域的末端固定安装有芯片主板17,芯片主板17连接测痛箱1总体电源,并通过信号传输线连接控制主机2。
22.优选的,所述升降臂13和升降传动马达14之间、水平臂15和水平传动马达16之间的连接方式均为齿轮齿条连接。
23.优选的,所述芯片主板17的固定方式包括以下两种,其一为紧密固定在水平传动马达16外壳中,其二为固定于测痛箱1下室的底部或侧面,通过电线与水平传动马达16及其他二维马达臂5的核心部件疏松连接。
24.本说明书中未提及的电路连接方式及机械结构、连接关系均为本领域的常规技术手段。
25.通过以上方案,配合主机上的市售的智能软件,可看到红外摄像头10在测痛笼3底部笼网这一平面的成像,并选择某一脚掌,直接交互控制刺激:主机自动计算在下室底部移动的距离,通过控制传动马达11、升降传动马达14以及水平传动马达16快速移动垂直向上的von frey纤维丝7,使其与脚掌的笼孔对齐,最后上刺,软件持续通过摄像画面,自动分析动物是否抬脚,如未抬脚,则自动转动von frey纤维丝转轮6,更改成另一力度更大的von frey纤维丝7垂直向上,再次上刺,直到动物抬脚,则自动记录抬脚对应的von frey纤维丝7克数,计入该动物机械痛敏阈值数据。
26.实施例1
27.实验员打开主机的控制系统,在软件界面中确定如下参数,每只动物编号,依次开始最小的von frey纤维丝力度,测痛笼3的校准尺寸等。将小鼠置于测痛笼3内,将它们从上部放入测痛箱1的上室,盖上测痛箱顶部盖子。将一组von frey纤维丝7共8个按规格依次插入von frey纤维丝转轮6,将von frey纤维丝转轮6连入转轮伸缩杆8,等小鼠适应环境后,开始测量痛敏。对每次的测量,一组红外发射器9发射红外线,一个红外摄像实时成像,在软件中选取脚掌范从最小力度开始,确定刺激,依次从最小力度开始,当动物抬脚后,成像系统自动判断抬脚,记录相应刺激克数作为痛敏阈值。
28.本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
29.以上所述仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。