一种目标区域和阴影联合决策的sar图像目标识别方法
技术领域
1.本发明涉及一种目标区域和阴影联合决策的sar图像目标识别方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)目标识别是现在战场情报获 取的关键手段之一。为此,国内外学者针对这一领域开展了广泛而深入的研究。 sar目标识别方法一般包括两个关键步骤,即,特征提取和分类器。前者通过 数学手段或者图像分析从原始sar图像获得低维的特征矢量。常用的sar图像 特征包括几何形状特征、投影特征和散射中心特征。几何特征主要描述目标的 物理形状信息,典型的有目标区域、轮廓等。投影特征通过数学变换的方式在 低维子空间寻求原始高维sar图像的不变特征,如主成分分析(principalcomponent analysis,pca)、线性鉴别分析(linear discriminant analysis,lda) [4]等。散射中心主要描述目标局部的电磁散射现象,如,属性散射中心[5]。分 类器通过对提取的特征进行作用从而对待识别样本的类别进行决策。常用与 sar图像目标识别的分类器包括支持向量机(support vector machines,svm) [6],稀疏表示分类器(sparse representation-based classification,src)[7]以及 卷积神经网络(convolutional neural network,cnn)等。
[0003]
为了提高sar目标识别的性能,应当充分利用原始sar图像中蕴含的鉴别 力信息。现有的sar目标识别方法中,大部分直接采用整体sar图像或是分割 后的目标区域,而忽视了sar图像阴影的作用。
技术实现要素:
[0004]
本发明的目的在于克服现有技术的不足,提供一种目标区域和阴影联合决 策的sar图像目标识别方法。
[0005]
本发明的目的是通过以下技术方案来实现的:
[0006]
一种目标区域和阴影联合决策的sar图像目标识别方法,包括以下步骤:
[0007]
s1:对目标区域和阴影进行提取:
[0008]
s11:通过直方图均衡化将原始sar图像的灰度动态范围变换到[0,1];
[0009]
s12:采用均值滤波对步骤s11的结果进行平滑处理;
[0010]
s13:基于门限法进行sar图像分割,目标区域和阴影的门限分别设置为 0.8和0.2;
[0011]
s14:采用形态学开操作剔除背景噪声带来的虚警;
[0012]
s15:采用形态学闭操作连接目标区域以及阴影区域,获取光滑的目标以及 阴影轮廓;
[0013]
s2:对目标区域和阴影进行特征构造;
[0014]
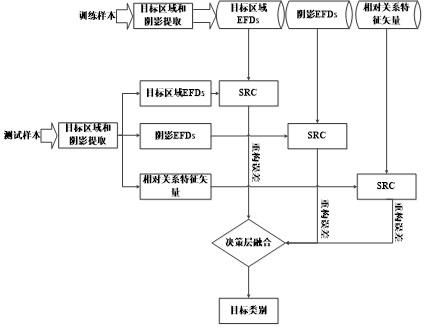
s3:采用稀疏表示分类器对目标区域边界、阴影的椭圆傅里叶描述子以及 相对关系的特征矢量进行分类;
[0015]
s4::采用决策层融合得到识别结果。
[0016]
进一步的,所述步骤s2用椭圆傅里叶描述子分别对目标和阴影的二值区域 进行描述,其公式为:
[0017][0018]
公式中系数fk∈r2×2,k=0,1,2,
…
代表椭圆傅里叶描述子,
[0019]
其计算公式为:
[0020][0021]
式中,f0为0阶描述子,代表封边边界的几何中心,包含两个系数[a
0 c0]
t
。 对于k≥1次谐波,包含四个系数[a
k b
k c
k dk]
t
;椭圆傅里叶描述子分别描述目标区 域边界和阴影边界,均采用7阶谐波,两个边界最终都表示为26维的特征矢量。
[0022]
进一步的,所述步骤s3还包括系数表示分类器训练步骤,具体步骤如下: 根据各个类别对于待识别样本的重构误差大小判定其类别,记 a=[a1,a2,...,am]∈rd×n为m类目标的训练样本构成的全局字典,其中 (i=1,2,
…
,m)为来自第i类的训练样本;对于待识别的测试样本y,其稀疏 公式为:
[0023][0024][0025]
式中,α代表稀疏系数矢量,ε预设的重构误差上限,
[0026]
根据估计得到的稀疏表示系数按照计算各个类别的重构误差并判定测试 样本的目标类别,计算公式为:
[0027][0028][0029]
式中,r(i)(i=1,2,...,m)对应各个类别的重构误差。
[0030]
进一步的,所述步骤s4还包括决策层融合的步骤,具体步骤为:
[0031]
将分类结果转换为归一化的相似度,其公式为:
[0032][0033]
通过线性加权的方式归一化的相似度融合:
[0034]
s(i)=ω1s1(i) ω2s2(i) ω3s3(i)i=1,2,
…
,m
[0035]
式中,s1(i),s2(i)和s3(i)分别代表目标区域边界、阴影边界以及目标区域和阴 影相对关系的归一化相似度;ω1,ω2,ω3为三者的线性加权系数,表示着三者的 重要程度;s(i)为融合后的归一化相似度。
[0036]
本发明的有益效果是:
[0037]
本发明采用椭圆傅里叶描述子描述目标区域和阴影的边界;同时采用特征 矢量
描述两者的相对关系。采用稀疏表示分类器对目标区域边界、阴影的椭圆 傅里叶描述子以及相对关系的特征矢量进行分类,并采用决策层融合的方法得 到更为稳健的识别结果。
附图说明
[0038]
图1为本发明流程图;
[0039]
图2为本发明实施例使用的目标区域和阴影提取方法的示意图;
[0040]
图3为本发明目标区域和阴影相对关系描述示意图;
[0041]
图4为本发明实施例对10类目标的识别结果;
[0042]
图5为本发明实施例各类方法在不同信噪比下的识别性对比图;
[0043]
图6为本发明实施例各类算法在不同分辨率下的识别性能对比图。
具体实施方式
[0044]
下面将结合实施例,对本发明的技术方案进行清楚、完整地描述,显然, 所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发 明中的实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有 其他实施例,都属于本发明保护的范围。
[0045]
参阅图1-6,本发明提供一种技术方案:一种目标区域和阴影联合决策的 sar图像目标识别方法,包括以下步骤:
[0046]
s1:对目标区域和阴影进行提取:
[0047]
s11:通过直方图均衡化将原始sar图像的灰度动态范围变换到[0,1];
[0048]
s12:采用均值滤波对步骤s11的结果进行平滑处理;
[0049]
s13:基于门限法进行sar图像分割,目标区域和阴影的门限分别设置为 0.8和0.2;
[0050]
s14:采用形态学开操作剔除背景噪声带来的虚警;
[0051]
s15:采用形态学闭操作连接目标区域以及阴影区域,获取光滑的目标以及 阴影轮廓;
[0052]
图2对本发明使用的目标区域和阴影提取方法进行了直观的解释说明,图2 中(a)为原始图像。经过上述步骤后的分割结果如图2中(b)所示。门限分 割的结果存在大量背景杂波带来的虚警,图2中(c)显示了通过形态学开操作 剔除这些虚警后的结果。采用形态学闭操作连接目标区域和阴影得到最终的提 取结果如图2中(d)所示;
[0053]
s2:对目标区域和阴影进行特征构造;
[0054]
s3:采用稀疏表示分类器对目标区域边界、阴影的椭圆傅里叶描述子以及 相对关系的特征矢量进行分类;
[0055]
s4::采用决策层融合得到识别结果。
[0056]
进一步的,步骤s2用椭圆傅里叶描述子分别对目标和阴影的二值区域进行 描述,其公式为:
[0057][0058]
公式中系数fk∈r2×2,k=0,1,2,
…
代表椭圆傅里叶描述子,
[0059]
其计算公式为:
[0060][0061]
为了表征目标区域和阴影的相对关系,本发明用如图2所示的描述方法。 图中,矩形边框代表了目标和阴影联合区域的边界矩形,两个“*”形标记分辨 代表了目标区域和阴影的质心。具体的描述特征如表1所列。由此,目标区域 和阴影的相对关系可以用一个14维的特征矢量描述。
[0062]
式中,f0为0阶描述子,代表封边边界的几何中心,包含两个系数[a
0 c0]
t
。 对于k≥1次谐波,包含四个系数[a
k b
k c
k dk]
t
;椭圆傅里叶描述子分别描述目标区 域边界和阴影边界,均采用7阶谐波,两个边界最终都表示为26维的特征矢量。
[0063]
进一步的,步骤s3还包括系数表示分类器训练步骤,具体步骤如下:根据 各个类别对于待识别样本的重构误差大小判定其类别,记a=[a1,a2,
…
,am]∈rd×n为 m类目标的训练样本构成的全局字典,其中(i=1,2,
…
,m)为来自第i类的训 练样本;对于待识别的测试样本y,其稀疏公式为:
[0064][0065][0066]
式中,α代表稀疏系数矢量,ε预设的重构误差上限,
[0067]
根据估计得到的稀疏表示系数按照计算各个类别的重构误差并判定测试 样本的目标类别,计算公式为:
[0068][0069][0070]
式中,r(i)(i=1,2,...,m)对应各个类别的重构误差。
[0071]
进一步的,步骤s4还包括决策层融合的步骤,具体步骤为:
[0072]
将分类结果转换为归一化的相似度,其公式为:
[0073][0074]
通过线性加权的方式归一化的相似度融合:
[0075]
s(i)=ω1s1(i) ω2s2(i) ω3s3(i)i=1,2,
…
,m
[0076]
式中,s1(i),s2(i)和s3(i)分别代表目标区域边界、阴影边界以及目标区域和阴 影相对关系的归一化相似度;ω1,ω2,ω3为三者的线性加权系数,表示着三者的 重要程度;s(i)为融合后的归一化相似度。
[0077]
本发明提供以下实施案例进行进一步的说明:
[0078]
本实施案例采用美国darpa/afrl公开的mstar数据集进行验证实验。 该数据集包括了x波段hh极化下10类军事目标的实测sar图像,图像大小 128
×
128像素,原始分辨率为0.3m
×
0.3m,是目前验证sar目标识别算法最常 用的数据集之一。表2列出了10类目标的训
练样本和测试样本。其中,训练样 本采集于17
°
俯仰角,测试样本来自于15
°
俯仰角,其具体数据如下表所示
[0079]
表1本实施案例使用的训练和测试样本
[0080][0081]
采用本发明提出的方法对表1中的10类目标进行了识别,具体结果如图4 所示。本发明方法对单个目标的识别率均达到94%以上,最终10类目标的平均 识别率为96.72%。可见,联合目标区域和阴影的识别方法对10类目标仍然可以 取得较高的正确识别率,验证了其有效性。表2进一步对比了本发明方法与其 它方法在10类目标上的识别性能,本发明方法依旧保持最好的识别率。尽管cnn的分类能力很强,但是其性能与训练集的完备性息息相关。由于测试集的 部分型号未包含在训练集中,cnn的识别性能受到一定程度的影响。
[0082]
表2本发明方法与其它方法在10类目标识别上的对比
[0083][0084]
如图5所示:实际获取的sar数据通常会受到来自于背景环境和雷达系统 的噪声污染,因此识别算法应当对噪声干扰保持较强的稳健性。为了测试提出 方法对于噪声干扰的稳健性,本发明传统方法对10类目标的测试样本添加不同 程度的高斯白噪声进而测试各个识别算法在不同信噪比(signal-to-noise ratio, snr)下的识别性能。可以看出,本发明算法在各个信噪比下均保持最高的识 别率,充分证明了其对于噪声干扰的较强稳健性。同时,src在低噪声水平时 相比svm和cnn具有更强的稳健性,这是由于稀疏表示自身对于噪声的稳健 性。因此,本发明算法在噪声干扰下的良好性能得益于目标区域和阴影的联合 使用以及稀疏表示的优良特性
[0085]
如图6所示,由于sar传感器的差异,获取的待识别sar图像的分辨率可 能与训练样本有所差异这就要求识别算法对于分辨率变化具有一定的稳健性。 为了测试提出算法对于分辨率变化的稳健性,本发明按照传统方法基于原始10 类目标的测试样本构造了不同分辨率的sar图像。通过在不同分辨率下测试各 类识别方法。对比而言,本发明算法在各个分辨率下均保持最高的识别率,充 分验证了其杜宇分辨率变化的稳健性。在分辨率改变的条件下,目标的全局特 征发生了较大的变化,因此基于全局特征的svm、src和cnn方法均出现了 较为显著的性能下降。本发明算法是基于目标区域和阴影,尽管分辨率较低, 两者仍然可以以较高的精度得到分离。因此,本发明方法仍然可以取得较好的 识别性能
[0086]
以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本发明 所披
露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修 改和环境,并能够在本发明所述构想范围内,通过上述教导或相关领域的技术 或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范 围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。