技术特征:
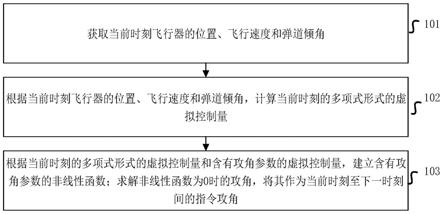
1.一种飞行器制导方法,其特征在于,包括:获取当前时刻飞行器的位置、飞行速度和弹道倾角;根据当前时刻飞行器的位置、飞行速度和弹道倾角,计算当前时刻的多项式形式的虚拟控制量;根据当前时刻的多项式形式的虚拟控制量和含有攻角参数的虚拟控制量,建立含有攻角参数的非线性函数;求解非线性函数为0时的攻角,将其作为当前时刻至下一时刻间的指令攻角。2.根据权利要求1所述的飞行器制导方法,其特征在于,根据当前时刻飞行器的位置、飞行速度和弹道倾角,计算当前时刻的多项式形式的虚拟控制量;包括:当前时刻的多项式形式的虚拟控制量u(t)为:其中,t为当前时刻,v
t
为当前时刻的飞行器的速度,γ
t
为当前时刻的飞行器的弹道倾角;z
t
为当前时刻的飞行器在发射坐标系的z坐标值;z
f
为巡航飞行的指定高度,t
f
为飞行器从开始飞行到指定高度z
f
的飞行时间。3.根据权利要求2所述的飞行器制导方法,其特征在于,飞行器从开始飞行到指定高度z
f
的飞行时间t
f
的取值为:其中,t
setf
是期望的制导律的飞行器飞行时间,t
min
为进入巡航段的剩余飞行门限值,取值区间为5秒至15秒。4.根据权利要求3所述的飞行器制导方法,其特征在于,根据当前时刻的多项式形式的虚拟控制量和含有攻角参数的虚拟控制量,建立含有攻角参数的非线性函数;包括:建立当前时刻的虚拟控制量u
com
(t)的表达式:其中,t为发动机推力,α为带求解的攻角,ρ为大气密度函数,c
l
(ma,α)为升力系数,马赫数ma=v
t-1
/v
air
,v
air
为当地音速;s
ref
为飞行器的特征面积,g为重力加速度,m为飞行器的质量;含有攻角参数的非线性函数f(α)为:f(α)=u(t)-u
com
(t)。5.根据权利要求4所述的飞行器制导方法,其特征在于,求解非线性函数为0时的攻角,将其作为当前时刻至下一时刻间的指令攻角,包括:利用牛顿迭代法求解满足f(α)=0的α,迭代过程如下:第k 1次迭代的攻角α
k 1
为:
其中,为非线性函数对第k次迭代的攻角α
k
的偏导数,具体的表达式为:其中,为升力系数对攻角的偏导数;攻角的迭代初值为上一时刻的攻角值;当达到预设迭代次数,将得到的攻角作为当前时刻至下一时刻间的指令攻角。6.一种飞行器制导装置,其特征在于,包括:获取单元,用于获取当前时刻飞行器的位置、飞行速度和弹道倾角;多项式虚拟控制量计算单元,用于根据当前时刻飞行器的位置、飞行速度和弹道倾角,计算当前时刻的多项式形式的虚拟控制量;指令攻角计算单元,用于根据当前时刻的多项式形式的虚拟控制量和含有攻角参数的虚拟控制量,建立含有攻角参数的非线性函数;求解非线性函数为0时的攻角,将其作为当前时刻至下一时刻间的指令攻角。7.一种电子设备,其特征在于,包括:存储器、处理器和存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1-5任一项所述的飞行器制导方法。8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时实现如权利要求1-5任一项所述的飞行器制导方法。
技术总结
本申请提供了一种飞行器制导方法、装置、电子设备及存储介质,涉及导弹发射技术领域,具体为:获取当前时刻飞行器的位置、飞行速度和弹道倾角;根据当前时刻飞行器的位置、飞行速度和弹道倾角,计算当前时刻的多项式形式的虚拟控制量;根据当前时刻的多项式形式的虚拟控制量和含有攻角参数的虚拟控制量,建立含有攻角参数的非线性函数;求解非线性函数为0时的攻角,将其作为当前时刻至下一时刻间的指令攻角。本申请可以根据当前状态实时生成最优制导指令,不依赖于标称轨迹,适应性更强。适应性更强。适应性更强。
技术研发人员:杨良 陈万春 王冲冲
受保护的技术使用者:北京航空航天大学
技术研发日:2021.12.22
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。