技术特征:
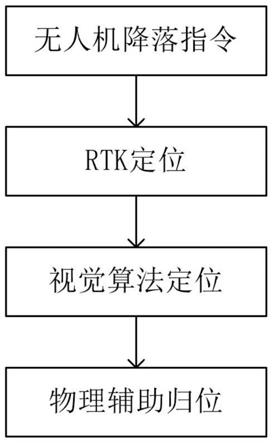
1.一种无人机精准降落机巢平台的方法,其特征在于:所述机巢平台上设置有主识别码和辅助识别码、且对应无人机的机脚架点位设置有凹槽,所述方法包括如下步骤:步骤一,无人机接到降落指令后通过rtk定位所述机巢平台;步骤二,无人机通过fasterrcnn目标识别识别所述主识别码和所述辅助识别码,并计算返回所述主识别码和所述辅助识别码的位置信息;步骤三,根据所述位置信息调整无人机位置,使得无人机降落在所述机巢平台上、且无人机的机脚架正降落在所述凹槽处;步骤四,无人机利用自身重力使机脚架滑动到所述凹槽正中央位置,实现精准降落。2.根据权利要求1所述的无人机精准降落机巢平台的方法,其特征在于:所述位置信息包括旋转角信息和所述主识别码的坐标信息。3.根据权利要求2所述的无人机精准降落机巢平台的方法,其特征在于:步骤二中无人机通过fasterrcnn目标识别识别来自无人机摄像头端的图像数据源,若无所述主识别码和所述辅助识别码的图像则返回(0,0,0,0),若有所述主识别码和所述辅助识别码的图像则进行旋转角信息计算,并返回所述主识别码的坐标信息。4.根据权利要求3所述的无人机精准降落机巢平台的方法,其特征在于:所述旋转角信息计算方法如下:s1,返回所述主识别码和所述辅助识别码的对角坐标;s2,分别计算所述主识别码和所述辅助识别码的中心点坐标,并计算所述主识别码和所述辅助识别码的大小;s3,以图片x,y坐标轴为基准,计算从辅助识别码中心点坐标到主识别码中心点坐标的向量和y轴正方向的夹角;s4,根据计算的夹角计算出旋转角信息。5.根据权利要求4所述的无人机精准降落机巢平台的方法,其特征在于:步骤四中调整无人机位置的方法如下:a,根据旋转角信息调整无人机方向,使得旋转角减小到10
°
以下。b,根据所述坐标信息调整无人机的位置,使得在无人机摄像头中呈现出所述主识别码居中、且所述主识别码在所述辅助识别码正前方,误差在无人机的机脚架宽度的5%以内。
技术总结
本发明公开了一种无人机精准降落机巢平台的方法,所述机巢平台上设置有主识别码和辅助识别码、且对应无人机的机脚架点位设置有凹槽,所述方法包括如下步骤:步骤一,无人机接到降落指令后通过RTK定位所述机巢平台;步骤二,无人机通过fasterrcnn目标识别识别所述主识别码和所述辅助识别码,并计算返回所述主识别码和所述辅助识别码的位置信息;步骤三,根据所述位置信息调整无人机位置,使得无人机降落在所述机巢平台上、且无人机的机脚架正降落在所述凹槽处;步骤四,无人机利用自身重力使机脚架滑动到所述凹槽正中央位置,实现精准降落。本发明实现对无人机的精准降落。本发明实现对无人机的精准降落。本发明实现对无人机的精准降落。
技术研发人员:黄小青 胡延宝
受保护的技术使用者:中飞赛维智能科技股份有限公司
技术研发日:2021.11.24
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。