技术特征:
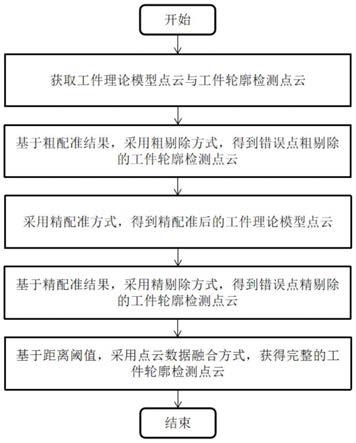
1.一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,包括如下步骤:步骤1:获取工件理论模型点云与工件轮廓检测点云的初始位置坐标;步骤2:采用粗配准方式,得到粗配准后的工件理论模型点云;步骤3:根据粗配准后的工件理论模型点云,采用粗剔除方式,得到错误点粗剔除后的工件轮廓检测点云;步骤4:根据粗配准后的工件理论模型点云与错误点粗剔除的工件轮廓检测点云,采用精配准方式,得到精配准后的工件理论模型点云;步骤5:根据精配准后的工件理论模型点云与错误点粗剔除的工件轮廓检测点云,采用精剔除方式,得到错误点精剔除的工件轮廓检测点云;步骤6:基于距离阈值,采用点云数据融合方式,获得完整的工件轮廓检测点云。2.根据权利要求1所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述粗配准方式具体为:根据工件理论模型点云与工件轮廓检测点云的初始位置坐标,找到工件理论模型点云与工件轮廓检测点云的对应关系,计算工件理论模型点云到工件轮廓检测点云的旋转矩阵以及两个点云中心点的平移向量,将工件理论模型点云采用平移向量和旋转矩阵进行变换,获得粗配准后的工件理论模型点云。3.根据权利要求2所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述粗剔除方式具体为:根据粗配准后的工件理论模型点云与工件轮廓检测点云的位置坐标,计算粗配准后的工件理论模型点云每个点在工件轮廓检测点云中的多个对应点;计算粗配准后的工件理论模型点云内各点到工件轮廓检测点云内多个对应点的距离中的最小距离,由计算出的所有最小距离组成粗剔除最近邻数据集;设定粗剔除阈值,将粗剔除最近邻数据集中大于等于粗剔除阈值的数据在工件轮廓检测点云中对应的点剔除,获得错误点粗剔除的工件轮廓检测点云。4.根据权利要求3所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述精配准方式具体为:根据粗配准后的工件理论模型点云与错误点粗剔除的工件轮廓检测点云的位置坐标,找到粗配准后的工件理论模型点云与错误点粗剔除的工件轮廓检测点云的对应关系,计算粗配准后的工件理论模型点云到错误点粗剔除的工件轮廓检测点云的非刚性空间变换函数;采用非刚性空间变换函数对粗配准后的工件理论模型点云进行变换,获得精配准后的工件理论模型点云。5.根据权利要求4所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述精剔除方式具体为:根据精配准后的工件理论模型点云与错误点粗剔除的工件轮廓检测点云的位置坐标,计算精配准后的工件理论模型点云每个点在错误点粗剔除的工件轮廓检测点云中的多个对应点;计算精配准后的工件理论模型点云内各点到错误点粗剔除的工件轮廓检测点云内多个对应点的距离中的最小距离,由计算出的所有最小距离组成精剔除最近邻数据集;设定精剔除阈值,将精剔除最近邻数据集中大于等于精剔除阈值的数据在工件轮廓检测点云
中对应的点剔除,获得错误点精剔除的工件轮廓检测点云。6.根据权利要求5所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述步骤6具体如下:步骤6-1:设定工件理论模型点云中相邻两点之间的最大距离为距离阈值;步骤6-2:根据精配准后的工件理论模型点云与错误点精剔除的工件轮廓检测点云的位置坐标,计算精配准后的工件理论模型点云每个点在错误点精剔除的工件轮廓检测点云中的多个对应点;计算精配准后的工件理论模型点云内各点到错误点精剔除的工件轮廓检测点云内多个对应点的距离中的最小距离,由计算出的所有最小距离组成点云数据融合最近邻数据集;步骤6-3:当点云数据融合最近邻数据集中的距离数据大于距离阈值时,将该距离数据对应的精配准后的工件理论模型点云的点判定为工件轮廓检测点云的缺失点;当点云数据融合最近邻数据集中的距离数据小于等于距离阈值时,将该距离数据对应的精配准后的工件理论模型点云的点判定为工件轮廓检测点云的非缺失点;步骤6-4:保留精配准后的工件理论模型点云中的缺失点,剔除非缺失点;步骤6-5:将错误点精剔除的工件轮廓检测点云与步骤6-4中保留的缺失点拼接成一组点云,即完整的工件轮廓检测点云。7.根据权利要求2所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述粗配准方式采用基于主成分分析的点云配准算法。8.根据权利要求4所述的一种面向工件成型过程中轮廓检测的点云数据处理方法,其特征在于,所述精配准方式采用相干点漂移非刚性配准算法。
技术总结
本发明公开了一种面向工件成型过程中轮廓检测的点云数据处理方法,用于解决因内部或外部环境因素导致的检测点云数据缺陷问题。该方法包括:获取工件理论模型点云与工件轮廓检测点云;采用粗配准方式,得到粗配准后的工件理论模型点云;采用粗剔除方式,得到错误点粗剔除的工件轮廓检测点云;采用精配准方式,得到精配准后的工件理论模型点云;采用精剔除方式,得到错误点精剔除的工件轮廓检测点云;基于距离阈值,采用点云数据融合方式,获得完整工件轮廓检测点云。该方法能精准剔除工件轮廓检测点云中的错误点,有效补充其缺失点,为后续几何特征尺寸的提取、分析奠定基础。分析奠定基础。分析奠定基础。
技术研发人员:罗明 裴昊男 杜思哲 张畅
受保护的技术使用者:西北工业大学
技术研发日:2021.12.12
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。