1.本发明涉及驱动轴载荷谱采集和编制领域,具体涉及一种汽车驱动轴载荷谱采集和编制方法。
背景技术:
2.驱动轴是汽车传动系统中的重要部件。驱动轴由内端万向节总成,中间轴和外端万向节总成三部分组成。在汽车的正常行驶过程中,驱动轴上会加载一定的转矩和转速。在转弯和车轮跳动时,驱动轴内端万向节和外端万向节会发生角度变化。为了更好的评估驱动轴的耐久性能,路试试验需要采集内外万向节工作角度、驱动轴转矩、驱动轴转速。由于实际测试成本和时间的关系,载荷谱的采集只能实现短时间的采集。为了使汽车在试验场的载荷谱测试数据很好的反应耐久规范要求,需要根据规范要求历程进行载荷谱外推。将外推后的载荷谱进行载荷分级以及block载荷损伤等效编制成适合耐久台架试验的程序谱。编制后的耐久程序谱的损伤量不小于目标耐久里程路试的损伤量。
3.载荷谱的外推方法主要有:参数外推法、雨流矩阵外推法、按里程/分位点外推法、时域外推法。参数外推法需要获取载荷谱均幅值概率密度函数,基于该分布函数以及外推目标里程,将相应的累计频次或载荷极值进行外推。
4.雨流矩阵外推法是先将载荷谱通过雨流计数得到雨流矩阵,基于雨流矩阵的分布选择核函数进行核密度统计分析,得到非参数雨流后重新对雨流矩阵进行核密度估计,并运用蒙特卡洛法实现载荷外推。采用参数法和雨流矩阵外推会丢失各个载荷参数的时间位置信息,因此不适用于多参数的耐久载荷外推。按里程/分位点外推法就是根据目标里程的需求对采集载荷谱进行重复,目标路程和实际里程的比值即为外推的系数。按里程/分位点外推只能重复的出现已测值,从而忽略了实际路试可能出现的大载荷工况。时域外推法认为载荷谱中超过阈值的峰值超出量和谷值超出量服从某种分布,通过对超出阈值的极值进行概率密度分布函数拟合,并将基于拟合得到的概率密度分布函数对极值进行外推。(基于内外层嵌套的第二代非支配遗传算法的纵向连通空气悬架的几何参数优化方法,cn201811302294.8)
5.现有技术中,对汽车驱动轴载荷谱的编制方法主要只考虑单参数扭矩这一参数对驱动轴耐久性能的影响。但实际上汽车驱动除了承受扭矩外,驱动轴转速和内外端万向节工作角度的变化也会对其耐久性能产生影响。
技术实现要素:
6.本发明所要解决的技术问题是:提供一种汽车驱动轴载荷谱的采集和编制方法,该方法能够采集到影响汽车驱动轴耐久路试性能的多种载荷参数(万向节工作角度、驱动轴扭矩、驱动轴转速),并利用基于广义帕累托分布的时域外推方法将采集到的的多参数载荷谱外推至目标耐久里程,最后再利用基于time at level的载荷分级方法,将外推后得到的多参数载荷谱编制成耐久台架试验程序谱。本发明方法使影响到汽车驱动轴耐久性能的
载荷参数都能被采集到,并且编制处理后得到的耐久台架程序谱的损伤量也不小于目标耐久里程路试的损伤量。
7.本发明至少通过如下技术方案之一实现。
8.一种汽车驱动轴载荷谱采集和编制方法,包括以下步骤:
9.s1、确定驱动轴载荷谱采集参数,选取载荷谱采集传感器及校核传感器安装位置;
10.s2、制定载荷谱采集的方案,进行载荷谱的采集;
11.s3、对采集到的载荷谱进行预处理,对预处理后的载荷谱进行特征值统计,对试验结果进行评估;
12.s4、利用图解法和估计量稳定法确定载荷谱时域外推的上下阈值;
13.s5、根据上下阈值,分别提取各载荷的峰谷值;利用峰谷值和上下阈值计算出各载荷的峰值超出量和谷值超出量,使用峰值超出量和谷值超出量对原峰值超出量和谷值超出量进行替换,进而获得外推信号;
14.s6、将外推后的载荷谱分级,得到不同载荷等级下各个信号的频次关系;
15.s7、利用block载荷等效原理从各载荷的频次关系中提取出适合耐久试验的工况点;
16.s8、完成汽车驱动轴载荷谱的采集和编制;
17.进一步地,所述载荷谱采集参数包括驱动轴载荷谱采集参数为内外端万向节工作角度、驱动轴扭矩、驱动轴转速。
18.进一步地,选用位移传感器测量轮跳位移,并换算成内端万向节的工作角度;
19.通过can总线读取方向盘转角,并换算成外端万向节的工作角度;
20.选用无线扭矩遥测装置测量驱动轴扭矩;
21.选用接近开关或者can线读取的方式测量驱动轴转速。
22.进一步地,不同的车型,底盘空间位置不同,因此传感器的布置需要根据实车底盘空间位置确定,不同的车型应选取对应该车型的试验场地进行试验。
23.进一步地,位移传感器布置在减振器处,通过减振器处的位移行程来作为轮跳行程;无线扭矩遥测装置布置在驱动轴上,并与轴上提前贴好的应变片回路相连;若采用接近开关测量转速则需将接近开关布置在制动盘或者abs齿圈处。
24.进一步地,所述预处理包括删除小幅值、去漂移、去毛刺、滤波处理。
25.进一步地,步骤s4包括以下步骤:
26.首先根据图解法画出载荷超出量均值函数图,通过该均值函数图确定阈值区间,然后再利用估计量稳定法,从开始确定的阈值区间中选取能够使形状参数ξ和修正尺寸参数变化幅度不超过阈值区间初始阈值的10%的值作为时域载荷外推的上下阈值。
27.进一步地,当gpd分布作为阈值u0超出量的有效近似时,载荷超出量均值函数图中大于阈值u0的部分为近似线性的,并且具有正的斜率。
28.进一步地,步骤s4包括:选择广义帕累托分布函数对峰值超出量和谷值超出量进行拟合,使用概率函数分布图对各载荷的峰值超出量和谷值超出量进行拟合度检验,并且使用新生成的相同数量的峰值超出量和谷值超出量对原峰值超出量和谷值超出量进行替换,进而获得外推信号。
29.进一步地,步骤s3包括:将通过预处理后的载荷谱特征值进行比较,从而判断试验
结果的好坏,所述载荷谱特征值包括载荷谱的最大值、最小值、幅值、均值、标准差以及均方根值,波动值占比不超过10%说明载荷谱采集信号可靠。
30.本发明与现有技术相比,具有以下优点:
31.1)载荷谱采集了影响驱动轴耐久性能的多种载荷参数,与仅考虑驱动轴转矩的单载荷参数载荷谱,对耐久性能的评估更加可靠;
32.2)采用时域外推的方法将载荷谱外推至了目标耐久里程,最后将外推后的载荷谱利用载荷分级的方法以及损伤等效的原理,等效成耐久试验台架工况,与直接采集目标耐久里程的载荷谱相比,大大缩短了载荷谱采集和试验的成本和时间;
33.3)采用基于广义帕累托分布的时域外推方法和其他外推方法相比,不会丢失各个载荷参数的时间位置信息,更适合于多载荷参数的载荷谱外推。;
34.4)采用基于time at level法的载荷分级方法与传统的单载荷参数(扭矩)相比,可以更好的对应各个载荷参数的时间位置信息,为多参数载荷谱的编制提供了基础。
35.5)采用block载荷等效原理与直接利用外推后的载荷谱进行选择耐久台架试验工况点相比,能够在损伤保留的基础上,大大缩短试验时间,减小试验成本。
附图说明
36.图1是本发明一种汽车驱动轴载荷谱采集和编制方法流程图;
37.图2是本发明中基于广义帕累托分布的时域外推原理图;
38.图3a是本发明中提取的万向节工作角度的峰值超出量;
39.图3b是本发明中提取的万向节工作角度的谷值超出量;
40.图3c是本发明中提取的驱动轴转矩的峰值超出量;
41.图3d是本发明中提取的驱动轴转矩的谷值超出量;
42.图3e是本发明中提取的驱动轴转速的峰值超出量;
43.图3f是本发明中提取的驱动轴转速的谷值超出量;
44.图4a是本发明中万向节工作角度外推前载荷谱;
45.图4b是本发明中万向节工作角度外推后载荷谱;
46.图4c是本发明中驱动轴转矩外推前载荷谱;
47.图4d是本发明中驱动轴转矩外推后载荷谱;
48.图4e是本发明中驱动轴转速外推前载荷谱;
49.图4f是本发明中驱动轴转速外推后载荷谱。
具体实施方式
50.为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。以下结合附图实施例对本发明作进一步详细描述。
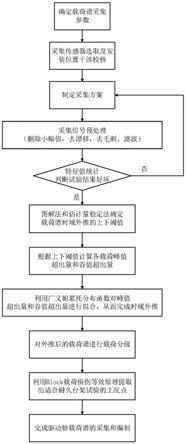
51.如图1所示,一种汽车驱动轴载荷谱采集和编制方法,包括以下步骤:
52.①
、确定载荷谱采集参数,驱动轴包括内端万向节总成,中间轴和外端万向节总成
三部分组成。驱动轴在正常工作时,变化的载荷有内外端万向节的工作角度、驱动轴扭矩、驱动轴转速。因此选取内外端万向节工作角度、驱动轴扭矩、驱动轴转速作为载荷谱采集参数。
53.②
、对载荷谱采集传感器进行选取及安装位置干涉校核;
54.选用位移传感器测量轮跳位移最后换算成内端万向节的工作角度,通过can总线读取方向盘转角从而换算成外端万向节的工作角度(后驱车外端万向节工作角度则默认为安装角度)。选用无线扭矩遥测装置测量驱动轴扭矩。选用接近开关或者can线读取的方式来测量驱动轴转速。传感器的空间布置不应在整车行驶过程中与其他零部件不发生干涉。
55.③
、制定载荷谱采集的方案,进行载荷谱的采集;
56.不同的车型,底盘空间位置不同,因此传感器的布置需要根据实车底盘空间位置确定,不同的车型应选取适合该车型的试验场地进行试验。
57.本发明适用于乘用车和全地形车这种使用断开式驱动轴布置的车型,乘用车可以按照gb/t 12678汽车可靠性行驶试验方法进行道路试验方案的确定,全地形车的道路试验可以选取搓板路、坡道路、越野路、砂石路等试验道路进行组合。
58.采集时要控制变量,路试时试车员不应换人,相同路试载荷谱采集要进行重复试验,一般重复试验三次。
59.作为优选的例子,位移传感器布置在减振器处,通过减振器处的位移行程来作为轮跳行程;无线扭矩遥测装置布置在驱动轴上,并与轴上提前贴好的应变片回路相连;若采用接近开关测量转速则需将接近开关布置在制动盘或者abs齿圈处。
60.无线扭矩遥测装置包括接收机、发射机、信号天线和激励电源。发射机用于接收驱动轴上布置的全桥应变片桥路输出的信号,然后通过信号天线将发射机接收的信号传递给接收机,最后将接收机和信号采集设备相连读取信号,激励电源主要用来给发射机供电。
61.④
、对采集到的载荷谱进行预处理,包括删除小幅值、去漂移、去毛刺、滤波等处理;
62.⑤
、对预处理后的载荷谱进行特征值统计,对试验结果的好坏进行评估。如果试验的特征值结果相差较大,需重新采集载荷谱;
63.通过比较预处理后三组载荷谱特征值,从而判断试验结果的好坏。一般载荷谱特征值包括载荷谱的最大值、最小值、幅值、均值、标准差以及均方根值,根据各个特征值的波动值占载荷谱最大值的百分比来判断试验结果好坏,一般波动值占比不超过10%说明载荷谱采集信号比较可靠。
64.⑥
、利用图解法和估计量稳定法确定载荷谱时域外推的上下阈值;
65.⑦
、根据确定好的上下阈值,分别提取各载荷的峰谷值,提取方法如图2所示,其中u
max
是上阈值,u
min
是下阈值,是峰值,是谷值,是峰值超出量,是谷值超出量;利用峰谷值和上下阈值计算出各载荷的峰值超出量和谷值超出量,提取出的超出量如图3所示,图3a是万向节工作角度的峰值超出量,图3b是万向节工作角度的谷值超出量,图3c是驱动轴转矩的峰值超出量,图3d是驱动轴转矩的谷值超出量,图3e是驱动轴转速的峰值超出量,图3f是驱动轴转速的谷值超出量。
66.选择广义帕累托分布函数对峰值超出量和谷值超出量进行拟合,并且生成新的相
同数量的峰值超出量和谷值超出量对原峰值超出量和谷值超出量进行替换,进而获得外推信号,获得的外推信号如图4所示,图4a是万向节工作角度外推前载荷谱,图4b是万向节工作角度外推后载荷谱,图4c是驱动轴转矩外推前载荷谱,图4d是驱动轴转矩外推后载荷谱,图4e是驱动轴转速外推前载荷谱,图4f是驱动轴转速外推后载荷谱。
67.⑧
、将外推后的载荷谱利用time at level法进行载荷分级,得到不同载荷等级下各个信号的频次关系。
68.⑨
、利用block载荷等效原理从各载荷的频次关系中提取出适合耐久试验的工况点;
69.⑩
、完成汽车驱动轴载荷谱的采集和编制;
70.所述步骤
⑥
中的阈值选取:首先根据图解法画出载荷超出量均值函数图,通过该均值函数图确定阈值区间。最后再利用估计量稳定法,从开始确定的阈值区间中选取能够使形状参数ξ和修正尺寸参数变化幅度较小的值(变化幅度不超过阈值区间初始阈值的10%)作为时域载荷外推的上下阈值。
71.当gpd分布作为阈值u0超出量的有效近似时,载荷超出量均值函数图中大于阈值u0的部分为近似线性的,并且具有正的斜率。
72.所述步骤
⑦
中的时域外推方法:根据确定好的上下阈值,分别提取各载荷的峰谷值;利用峰谷值和上下阈值计算出各载荷的峰值超出量和谷值超出量。选择广义帕累托分布函数对峰值超出量和谷值超出量进行拟合,并且生成新的相同数量的峰值超出量和谷值超出量对原峰值超出量和谷值超出量进行替换,进而获得外推信号;
73.根据各载荷的峰值超出量和谷值超出量拟合出来的广义帕累托分布函数需要选用概率函数分布图进行拟合度检验,确保拟合出来的分布函数符合实际分布情况,保证外推的准确性。
74.作为优选的例子,步骤
⑥
中,除了使用图解法和估计量稳定法确定阈值。还可以选用穿级计数法来确定阈值作为另一优选实施例,方法如下:计算出频次与最接近的载荷谱最大值和最小值,最大值对应上阈值,最小值对应下阈值。其中n0为穿级计数的频次最大值。
75.或者,选用hill估计的方法来确定阈值作为另一优选实施例:假设x(1)》x(2),
…
,x(n)为独立同分布的n个降序值,hill统计则为:式中k为超过样本的样本数。在hill图中,尾部稳定区域的起点横坐标k所对应的次序统计量x(k)值可作为阈值u。
76.进一步地,使用峰度法来确定阈值作为另一优选实施例:计算样本均值和样本峰度kn,其中,其中),n表示降序值个数,若,则选取使得值最大的样本值xi,并将其从样本中除去,重复上述步骤直到样本峰度kn小于3为止,在留下来的样本中选取最大的样本值xi,选取此值
作为阈值。
77.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。