1.本发明涉及机械仿生工程领域,特别涉及一种用于腿足式机器人足底、力学性能可调的多材料复合仿生足垫。
背景技术:
2.当前,快速发展的腿足式机器人技术给抢险救灾、物流运输、智能服务等领域带来诸多便利;复杂的路面环境对机器人的运动稳定性提出更高的要求及挑战,然而足部触地稳定性是影响腿足式机器人运动稳定性的主要因素之一;因此,通过合理的方式来提高机器人的触地稳定性具有重要研究意义。
3.文献调研表明:当前研究多通过复杂的机械结构及控制系统来调节机器人足部的触地姿势,以使得足部在竖直方向及水平方向上满足不同的力学特性,进而在一定程度上实现机器人运动中的触地稳定。该种方式普遍存在机械结构复杂、控制成本高等不足,且当机器人以不同速度行走时需要通过实时调节复杂的控制系统来改变足部在触地时在不同方向上的力学特性,以满足在不同行走速度下的触地稳定性需求。其次,部分研究通过在腿足式机器人足底安装硅胶、橡胶等弹性足垫以改善机器人的触地稳定性,这使得腿足式机器人在触地时竖直方向上的柔顺性较好,但由于所采用的弹性足垫材料通常为各向同性材料,进而导致机器人足部触地时在水平方向上制动距离较大,无法有效保证腿足式机器人在水平方向上的制动稳定性;因此当前的硅胶等弹性足垫无法同时满足机器人足部触地时各个方向的力学性能需求(垂直地面方向缓冲减震、前后方向制动),尚不能明显改善腿足式机器人的触地稳定性。
4.专利“一种提高腿足式机器人触地稳定性的耦合仿生足垫”通过模拟人体足跟垫隔室结构及材料以改善腿足式机器人触地稳定性,而该专利无法通过改变仿生足垫的结构参数来调节不同方向上的力学性能,配备该仿生足垫的腿足式机器人在不同速度、不同路面环境下容易产生触地稳定性不良的问题。因此,亟需解决该问题。
5.大自然激发了人们创新的灵感,人体足跟垫中呈螺旋状“刚性”的胶原纤维与“柔性”的弹性纤维交织缠绕成封闭的网状膜结构,网状膜之间相互连接构成了一个个独立的隔室腔,隔室腔内裹覆着呈固液复合材料特性的脂肪组织,从而使人体足跟垫呈现网状膜加强的双级固液复合材料特性。生物力学研究表明,螺旋状“刚性”胶原纤维与“柔性”弹性纤维耦合的网状纤维膜及脂肪组织所形成具有双级固液复合材料结构特性的足垫在其各向力学性能调控方面起着重要作用。
6.基于螺旋状“刚性”胶原纤维与“柔性”弹性纤维耦合的网状纤维膜及脂肪组织所形成具有双级固液复合材料特性的人体足跟垫启发,本专利发明了一种与人体足跟垫相似材料特性且力学性能可调的多材料复合仿生足垫。
技术实现要素:
7.本发明的目的是为了解决现有机器人足垫各方向力学性能不可调而导致腿足式
机器人触地失稳的问题,而提供一种具有力学性能可调的多材料复合仿生足垫。
8.本发明基于螺旋状“刚性”胶原纤维与“柔性”弹性纤维耦合的网状纤维膜及脂肪组织所形成具有双级固液复合材料特性的人体足跟垫的启示,通过其独特的材料及结构的组合仿生有效解决以上问题。
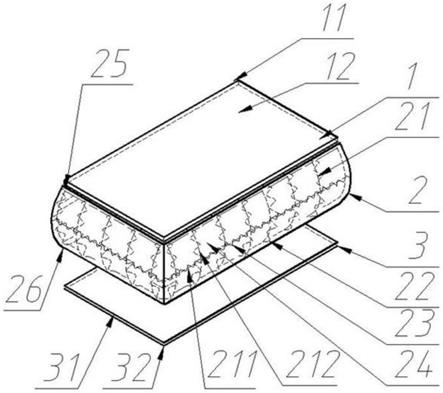
9.一种力学性能可调的多材料复合仿生足垫包括:仿生足底筋膜层、仿生网状纤维膜层、仿生足底皮肤层。
10.仿生足底筋膜层的仿生原型为人体足跟垫中的足底筋膜,该层使用与足底筋膜弹性模量相当的材料,如邵氏硬度为50a的硅胶、邵氏硬度为60a的硅胶等硅胶材料,仿生足底筋膜层下表面涂柔性硅胶粘结剂与仿生网状纤维膜层上表面相粘结,该层的厚度控制在2mm
±
0.5mm范围内。
11.仿生网状纤维膜层的仿生原型为人体足跟垫中的大隔室层,该层中呈螺旋状的胶原纤维与弹性纤维交织缠绕成网状纤维膜,网状纤维膜内部形成若干独立封闭的腔体,腔体内部填充着呈固液复合材料特性的脂肪组织,从而使人体足跟垫呈网状纤维膜加强的双级固液复合材料特性。仿生切向弹性纤维与仿生法向弹性纤维构成仿生弹性纤维网,仿生胶原纤维一及仿生胶原纤维二呈螺旋状并以不同的螺距在仿生切向弹性纤维上及仿生法向弹性纤维上缠绕;其中仿生胶原纤维一的螺距l1大于仿生胶原纤维二的螺距l2;缠绕有仿生胶原纤维的仿生弹性纤维网形成了仿生纤维束网;仿生胶原纤维可使用静电纺丝设备进行制备,仿生弹性纤维网可以以ecoflex0030硅胶通过翻模的方法进行制备。仿生纤维束网与ecoflex0010硅胶\ecoflex0020硅胶构成了仿生网状纤维膜;剖面图c-c中的中心线即点划线a两侧的仿生网状纤维膜呈平行对称分布,剖面图b-b中的中心线即点划线b两侧的仿生网状纤维膜呈平行对称分布。仿生网状纤维膜内形成若干独立封闭的隔室腔体,隔室腔体内填充呈固液复合特性的仿生脂肪组织,从而使得仿生网状纤维膜层具有与人体足跟垫具有类似特性的双级固液复合材料特性。仿生脂肪组织由体积分数为10%—30%的ecoflex0010双组分硅胶和70%—90%甘油的复合物所构成。仿生网状纤维膜层的层厚范围为15
±
1mm。
12.仿足底皮肤层使用dragonskin10、dragonskin20等硅胶材料,仿生足底皮肤层上表面涂sil-poxy
tm
粘结剂与仿生网状纤维膜层相粘结,该层的厚度控制在2
±
0.5mm范围内。
13.本发明的工作原理和过程为:
14.本发明基于螺旋状“刚性”胶原纤维与“柔性”弹性纤维耦合的网状纤维膜及脂肪组织所形成具有双级固液复合材料特性的人体足跟垫的启示,基于其独特的材料及结构的组合,发明了一种力学性能可调的多材料复合仿生足垫。本发明的仿生足垫包括:仿生足底筋膜层、仿生网状纤维膜层、仿生足底皮肤层;仿生足底筋膜层的上表面涂粘结剂与腿足式机器人足底相粘结,仿生足底筋膜层下表面涂粘结剂与仿生网状纤维膜层上表面相粘结,仿生足底皮肤层上表面涂粘结剂与仿生网状纤维膜层相粘结。腿足式机器人行走接触时,仿生足垫在竖直方向上受较大的压缩载荷f1,仿生网状纤维膜层中的仿生脂肪组织首先被压缩,仿生弹性纤维网被张紧,由于仿生胶原纤维二的螺距较小,在压缩时仿生足垫容易向四周变形,仿生足垫发生大变形,表现出低刚度力学特性;随着仿生足垫压缩到一定值时,呈螺旋状的仿生胶原纤维被拉伸,此时仿生足垫将难以压缩,其表现出高刚度力学特性,因此在整个压缩变形过程中仿生足垫表现出变刚度力学特性。文献中相关研究表明:具有该
种力学特性的仿生足垫不仅起到缓冲作用,而且起到防止触地时产生“震颤”,因此可保证腿足式机器人在竖直方向上的稳定性。若腿足式机器人的行走速度慢,竖直方向压缩载荷f1较小,可将仿生胶原纤维二的螺距适当增大,以适当调节竖直方向上的大变形范围,减小缓冲距离,保证竖直方向上的稳定性。仿生足垫在水平方向上受水平切向载荷f2,该载荷使得仿生弹性纤维网被拉伸,而此时表现出低刚度的力学特性,水平切向发生一定的变形;随之仿生胶原纤维一被拉伸,此时表现出高刚度力学特性,水平切向难以发生形变,由于仿生胶原纤维一的螺距大,因此制动时以较小的制动位移产生变刚度力学特性,可有效保证水平方向上的制动稳定性。通过调节仿生胶原纤维一的螺距可以改变制动位移的大小,若腿足式机器人的行走速度慢,水平切向载荷f2较小,可将仿生胶原纤维一的螺距适当增大,以适当减小制动位移,防止制动时水平位移过大造成触地失稳;若腿足式机器人的行走速度快,可将仿生胶原纤维一的螺距适当调小,以适当增大制动位移,缓冲较大的水平载荷,保证水平制动的稳定性。
15.仿生脂肪组织的材料类型为一级固液复合材料,具有粘弹性的生物力学特性,在仿生足垫触地时具有良好的吸能、减震作用。
16.综上所述,仿生足垫在触地时竖直方向上具有良好的缓冲减振及防“震颤”作用,水平方向上具有良好的制动稳定性,通过结构及材料的组合使得仿生足垫表现出良好的触地稳定性。
17.本发明的有益效果:
18.1、本发明基于螺旋状“刚性”胶原纤维与“柔性”弹性纤维耦合的网状纤维膜及脂肪组织所形成具有双级固液复合材料特性的人体足跟垫的启示,通过结构及材料的耦合作用,使仿生足垫表现在竖直方向产生“大变形”范围较大,柔顺性较好,表现出变刚度的力学特性,可有效起到防止竖直方向上触地“震颤”的产生;在水平方向上通过调节仿生胶原纤维的螺距实现有效制动,提高了制动稳定性。
19.2、本发明中通过调控仿生胶原纤维的螺距可实现竖直方向及水平方向上力学性能的调节,通过调节该螺距的大小可控制仿生足垫在竖直方向产生大变形的范围及水平方向上的制动距离,通过调节各方向的力学性能可实现机器人在不同运动工况下最佳触地稳定。
20.3、本发明中使用双组分ecoflex0010硅胶及甘油的固液复合材料来模仿脂肪组织,该种仿生脂肪组织具有粘弹性的生物力学特性,在仿生足垫触地时具有良好的吸能、减震作用。
附图说明
21.图1为本发明的整体结构示意图;
22.图2为本发明的主视图;
23.图3为本发明的俯视图;
24.图4为图2中的a-a剖面图;
25.图5为图3中的b-b剖面图;
26.图6为图3中的c-c剖面图;
27.图7为仿生弹性纤维网整体结构示意图;
28.图8为仿生纤维束网整体结构示意图;
29.图9为仿生网状纤维膜整体结构示意图;
30.图10为图8中的局部放大图i;
31.图11为图8中的局部放大图ii;
32.图12为仿生脂肪组织结构示意图。
33.其中:1—仿生足底筋膜层;2—仿生网状纤维膜层;21—仿生弹性纤维网;211—仿生切向弹性纤维;212—仿生法向弹性纤维;22—仿生胶原纤维一;23—仿生胶原纤维二;24—仿生网状纤维膜;25—仿生网状纤维膜层上表面;26—仿生网状纤维膜层下表面;27—隔室腔体;271—仿生脂肪组织;2711—ecoflex0010硅胶;2712—甘油;28—仿生纤维束网;3—仿生足底皮肤层;31—仿生足底皮肤层上表面;32—仿生足底皮肤层下表面。
具体实施方式
34.请参阅图1至图7所示,一种力学性能可调的多材料复合仿生足垫包括:仿生足底筋膜层1、仿生网状纤维膜层2、仿生足底皮肤层3。
35.仿生足底筋膜层1的仿生原型为人体足跟垫中的足底筋膜,该层使用与足底筋膜弹性模量相当的材料,如邵氏硬度为50a的硅胶、邵氏硬度为60a的硅胶等硅胶材料,仿生足底筋膜层下表面12涂柔性硅胶粘结剂与仿生网状纤维膜层上表面25相粘结,该层的厚度控制在2mm
±
0.5mm范围内。
36.仿生网状纤维膜层2的层厚范围为15
±
1mm,仿生切向弹性纤维211与仿生法向弹性纤维212构成仿生弹性纤维网21,仿生胶原纤维一22及仿生胶原纤维二23呈螺旋状并以不同的螺距在仿生切向弹性纤维211上及仿生法向弹性纤维212上缠绕;其中仿生胶原纤维一22的螺距l1大于仿生胶原纤维二23的螺距l2;缠绕有仿生胶原纤维的仿生弹性纤维网21形成了仿生纤维束网28;仿生胶原纤维可使用静电纺丝设备进行制备,仿生弹性纤维网21可以以ecoflex0030硅胶通过翻模的方法进行制备。仿生纤维束网28与ecoflex0010硅胶、ecoflex0020硅胶构成了仿生网状纤维膜24;剖面图c-c中点划线a两侧的仿生网状纤维膜24呈平行对称分布,剖面图b-b中点划线b两侧的仿生网状纤维膜24呈平行对称分布。仿生网状纤维膜24内形成了一个个独立封闭的隔室腔体27,隔室腔体27内填充呈固液复合特性的仿生脂肪组织271,从而使得仿生网状纤维膜层具有与人体足跟垫具有类似特性的双级固液复合材料特性。仿生脂肪组织271由体积分数为10%—30%的ecoflex0010双组分硅胶2711和70%—90%甘油2712的复合物所构成。仿生脂肪组织271的材料类型为一级固液复合材料,具有粘弹性的生物力学特性,在仿生足垫触地时具有良好的吸能、减震作用。腿足式机器人行走接触时,仿生足垫在竖直方向上受较大的压缩载荷f1,仿生网状纤维膜层2中的仿生脂肪组织271首先被压缩,仿生弹性纤维网21被张紧,由于仿生胶原纤维二23的螺距较小,在压缩时仿生足垫容易向四周变形,仿生足垫发生大变形,表现出低刚度力学特性;随着仿生足垫压缩到一定值时,呈螺旋状的仿生胶原纤维被拉伸,此时仿生足垫将难以压缩,其表现出高刚度力学特性,因此在整个压缩变形过程中仿生足垫表现出变刚度力学特性。文献中相关研究表明:具有该种力学特性的仿生足垫不仅起到缓冲作用,而且起到防止触地时产生“震颤”,因此可保证腿足式机器人在竖直方向上的稳定性。若腿足式机器人的行走速度慢,竖直方向压缩载荷f1较小,可将仿生胶原纤维二23的螺距适当增大,以适当调
节竖直方向上的大变形范围,减小缓冲距离,保证竖直方向上的稳定性。仿生足垫在水平方向上受水平切向载荷f2,该载荷使得仿生弹性纤维网21被拉伸,而此时表现出低刚度的力学特性,水平切向发生一定的变形;随之仿生胶原纤维一22被拉伸,此时表现出高刚度力学特性,水平切向难以发生形变,由于仿生胶原纤维一22的螺距大,因此制动时以较小的制动位移产生变刚度力学特性,可有效保证水平方向上的制动稳定性。通过调节仿生胶原纤维一22的螺距可以改变制动位移的大小,若腿足式机器人的行走速度慢,水平切向载荷f2较小,可将仿生胶原纤维一的螺距适当增大,以适当减小制动位移,防止制动时水平位移过大造成触地失稳;若腿足式机器人的行走速度快,可将仿生胶原纤维一22的螺距适当调小,以适当增大制动位移,缓冲较大的水平载荷,保证水平制动的稳定性。仿足底皮肤层3使用dragonskin10、dragonskin20等硅胶材料,仿生足底皮肤层上表面31涂柔性硅胶粘结剂与仿生网状纤维膜层下表面26相粘结,该层的厚度控制在2
±
0.5mm范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。