技术特征:
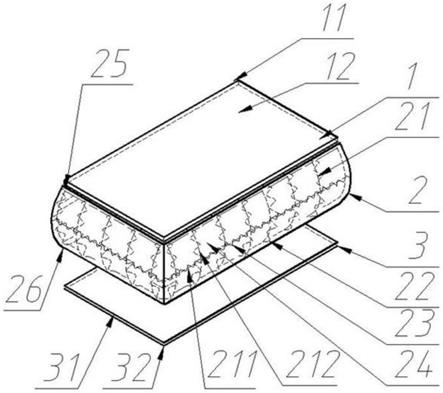
1.一种力学性能可调的多材料复合仿生足垫,其特征在于:包括仿生足底筋膜层(1)、仿生网状纤维膜层(2)和仿生足底皮肤层(3);仿生足底筋膜层下表面(12)涂柔性硅胶粘结剂与仿生网状纤维膜层上表面(25)相粘结,仿生足底皮肤层上表面(31)涂柔性硅胶粘结剂与仿生网状纤维膜层下表面(26)相粘结;仿生网状纤维膜层(2)中的仿生切向弹性纤维(211)与仿生法向弹性纤维(212)构成仿生弹性纤维网(21),仿生胶原纤维一(22)及仿生胶原纤维二(23)呈螺旋状并以不同的螺距在仿生切向弹性纤维(211)上及仿生法向弹性纤维(212)上缠绕;其中仿生胶原纤维一(22)的螺距l1大于仿生胶原纤维二(23)的螺距l2;缠绕有仿生胶原纤维的仿生弹性纤维网(21)形成仿生纤维束网(28);仿生纤维束网(28)与ecoflex0010硅胶和ecoflex0020硅胶构成仿生网状纤维膜(24);中心线两侧的仿生网状纤维膜(24)呈平行对称分布,中心线两侧的仿生网状纤维膜(24)呈平行对称分布;仿生网状纤维膜(24)内形成若干独立封闭的隔室腔体(27)。2.根据权利要求1所述的一种具有力学性能可调的多材料复合仿生足垫,其特征在于:所述的仿生足底筋膜层(1)的厚度为2mm
±
0.5mm;所述的仿生网状纤维膜层(2)的层厚为15
±
1mm;所述的仿足底皮肤层(3)厚度为2
±
0.5mm范围内。3.根据权利要求1所述的一种具有力学性能可调的多材料复合仿生足垫,其特征在于:所述的仿生足底筋膜层(1)材质为邵氏硬度为50a的硅胶或邵氏硬度为60a的硅胶;仿足底皮肤层(3)的材质为dragonskin10或dragonskin20。4.根据权利要求1所述的一种具有力学性能可调的多材料复合仿生足垫,其特征在于:所述的隔室腔体(27)内填充呈固液复合特性的仿生脂肪组织(271),仿生脂肪组织(271)由体积分数为10%—30%的ecoflex0010双组分硅胶(2711)和70%—90%甘油(2712)的复合物所构成。5.根据权利要求1所述的一种具有力学性能可调的多材料复合仿生足垫,其特征在于:所述的仿生胶原纤维使用静电纺丝设备进行制备,仿生弹性纤维网(21)以ecoflex0030硅胶通过翻模的方法进行制备。
技术总结
一种力学性能可调的多材料复合仿生足垫,包括仿生足底筋膜层、仿生网状纤维膜层和仿生足底皮肤层,仿生足垫各层通过柔性硅胶粘结剂相粘结。仿生足底筋膜层的弹性模量较高的硅胶材料;仿生网状纤维膜层中的仿生网状纤维膜裹覆着呈固液复合特性的仿生脂肪组织,改变该层中仿生胶原纤维的螺距即可调节仿生足垫在竖直方向及水平切向的力学性能,通过调节各方向的力学性能可实现机器人在不同运动工况下最佳触地稳定;呈固液复合特性的仿生脂肪组织具有粘弹性的生物力学特性,在仿生足垫触地时具有良好的吸能、减震作用。仿足底皮肤层使用弹性模量较低的硅胶材料。性模量较低的硅胶材料。性模量较低的硅胶材料。
技术研发人员:钱志辉 庄智强 任雷 白浩天 张千鹏 陈博雅 刁友浩 任露泉
受保护的技术使用者:吉林大学
技术研发日:2021.12.16
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。