1.本发明属于车辆控制技术领域,具体涉及一种解决位置传感器异常的控制方法及系统。
背景技术:
2.现有电机控制器的位置传感器一般有霍尔传感器、磁(或光电)编码器、旋转变压器等,其中车辆上应用的主要是旋转变压器,在可靠性、精度上相对较高。但无论是哪种位置传感器,都需要进行识别和解码电路,这就存在一些弊端:在传感器本体异常或解码电路出问题时,车辆就会出现无法行驶,只能等待救援;另外,在车辆高速行驶时,由于传感器硬件结构误差及解码延时的存在,控制器对电机位置的识别会存在精度偏差,导致效率偏低,甚至车辆控制不稳的情况。
技术实现要素:
3.本发明的目的是提供一种解决位置传感器异常的控制方法及系统,以在位置传感器异常时也能正常进行车辆控制。
4.为了解决上述技术问题,本发明公开了一种解决位置传感器异常的控制方法,包括以下步骤:
5.s1、实时监测位置传感器所采集的位置角度信号是否存在异常,若是则执行步骤s2,否则执行步骤s3;
6.s2、切换至无位置控制模式,将无位置控制模式计算得到的无位置角度信号进行电机控制;
7.s3、采用所述位置传感器所采集的位置角度信号进行电机控制。
8.进一步地,所述步骤s3具体包括以下步骤:
9.判断当前车辆是否处于高速行驶模式,若是,则将无位置控制模式计算得到的无位置角度信号与所述位置传感器所采集的位置角度信号进行位置补偿之后得到的已补偿角度信号进行电机控制啊,否则采用所述位置传感器所采集的位置角度信号进行电机控制。
10.进一步地,所述步骤s3中判断当前车辆是否处于高速行驶模式具体为:判断当前车辆的电机转速是否达到预设阈值,若是,则所述当前车辆处于高速行驶模式,否则所述当前车辆不处于高速行驶模式。
11.进一步地,所述步骤s2中还包括:发出位置异常报警信号进行提示。
12.进一步地,所述无位置控制模式计算得到的无位置角度信号具体为:。
13.为了解决上述技术问题,本发明还公开了一种解决位置传感器异常的控制系统,应用于上述的一种解决位置传感器异常的控制方法,包括旋变解码电路,所述旋变解码电路包括旋变数字转换器、两路信号放大电路和两路推挽电路;
14.所述旋变数字转换器的正弦波激励负信号和正弦波激励正信号分别与一路的信
号放大电路的一输入端电连接,每一路所述信号放大电路的输出端与一路推挽电路的输入端电连接,每一路所述推挽电路的输出端与电机的一激励端电连接。
15.进一步地,每一路所述信号放大电路的另一输入端均连接偏置电压电路。
16.进一步地,所述旋变数字转换器的正弦正端、正弦负端、余弦正端和余弦负端分别经过一rc滤波电路和一负载电阻之后输出到四个对应电机旋变输出信号端。
17.进一步地,所述电机旋变输出信号还电连接有偏置电压电路。
18.进一步地,所述旋变数字转换器还包括电源滤波电容、振荡电路和外围连接电路;
19.所述旋变数字转换器通过外围连接电路与主控芯片电连接,所述振荡电路为所述旋变数字转换器提供基准频率。
20.有益效果
21.一种解决位置传感器异常的控制方法及系统,在现有位置传感控制方式的基础上,引入无位置控制方式,实现双模工作模式,在检测到位置传感器异常时,可快速切换成无位置传感器模式,让车辆能够继续正常行驶,避免等待救援的情况,以在位置传感器异常时也能正常进行车辆控制。
附图说明
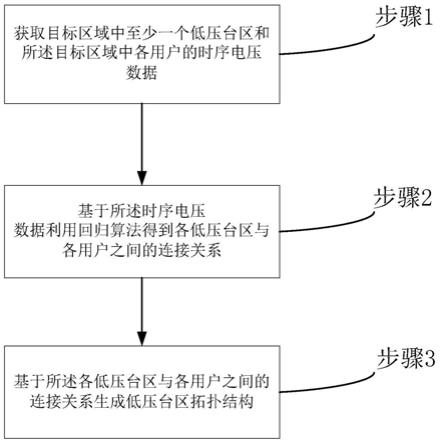
22.图1为一种解决位置传感器异常的控制方法的主要流程示意图;
23.图2为一种解决位置传感器异常的控制方法的具体流程示意图;
24.图3为一种解决位置传感器异常的控制方法中无位置控制模式的框架示意图;
25.图4为一种解决位置传感器异常的控制系统的框架示意图;
26.图5为一种解决位置传感器异常的控制系统中旋变解码电路的电路示意图;
27.图6为一种解决位置传感器异常的控制系统中旋变解码电路的信号波形示意图;
28.图7为一种解决位置传感器异常的控制系统中旋变解码电路的串行接口时序示意图。
具体实施方式
29.下面通过实施例对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
30.应当理解,本文所使用的诸如“具有”,“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
31.实施例一
32.如图1至图3所示,一种解决位置传感器异常的控制方法,包括以下步骤:
33.s1、实时监测位置传感器所采集的位置角度信号是否存在异常,若是则执行步骤s2,否则执行步骤s3;
34.s2、切换至无位置控制模式,将无位置控制模式计算得到的无位置角度信号进行电机控制;
35.如图2所示,当监测位置传感器所采集的位置角度信号存在异常,则同时也需要发出位置异常报警信号进行提示。同时,对于将无位置控制模式计算得到的无位置角度信号还需要进行软件滤波后再进行使用。
36.如图3所示,无位置控制模式计算得到的无位置角度信号具体为:
37.s21、根据指令转速和实际转速的偏差,通过pi调节得出指令电流;
38.其中,指令转速是mcu自身设定的,d轴和q轴的指令电流分别对应图2中idr和iqr。
39.s22、根据d轴的指令电流和采集电流的偏差,通过pi调节得出d轴电压,根据q轴的指令电流和采集电流的偏差,通过pi调节得出q轴电压,并将所述d轴电压和q轴电压数学变换成施加在电机上的u、v、w三相的电压;
40.在图2中,d轴的指令电流idse、采集电流idr以及d轴电压vd,q轴的指令电流iqse、采集电流iqr以及q轴电压vr。
41.s23、通过电流互感器检测出电机的电流,之后将其数学变换成idss和iqss,根据角度差将idss和iqss通过数学转换成电机的d轴的采集电流和q轴的采集电流;
42.s24、观测器根据电机参数、d轴电压以及d轴的采集电流和q轴的采集电流,计算出电机实际角度和施加控制角度的角度差,并通过调节速度来达到估算的施加控制角度和运行的电机实际角度一致,所述角度差
△
θ的公式为:
[0043][0044]
式中,v
dc
是d轴电压,i
dc
和id均是是d轴电流,i
qc
是q轴电流,r是电机阻抗,ke是电机的反电动势,ld是电机的d轴电感,lq是电机的q轴电感,ω是电机的角速度。
[0045]
s3、采用位置传感器所采集的位置角度信号进行电机控制。
[0046]
如图2所示,步骤s3具体包括以下步骤:
[0047]
判断当前车辆是否处于高速行驶模式,若是,则将无位置控制模式计算得到的无位置角度信号与位置传感器所采集的位置角度信号进行位置补偿之后得到的已补偿角度信号进行电机控制啊,否则采用位置传感器所采集的位置角度信号进行电机控制。
[0048]
其中,步骤s3中判断当前车辆是否处于高速行驶模式具体为:判断当前车辆的电机转速是否达到预设阈值,若是,则当前车辆处于高速行驶模式,否则当前车辆不处于高速行驶模式。
[0049]
其中,在得到角度信号后还需要控制角度计算、坐标变换、pi调节、产生svpwm并死区补偿之后控制电机运行。
[0050]
由此可知,无位置控制模式在电机运行时就同时启用,在非高速行驶模式并且位置传感器及相关电路无异常时,无位置控制模式估算的位置信息只是作为比对,不作控制使用。而在高速行驶模式下,本实施例中预设阈值为8000转,则当电机转速达到8000转时,无位置控制模式将发出握手申请,实时对电机位置信息进行更新补偿,以避免位置传感器结构误差及延时问题,提高控制精度及电机的运行效率,同时也提高了可靠性及车辆行驶的平稳性,让车辆行驶更加平稳舒适。
[0051]
实施例二
[0052]
如图4至图7所示,本发明还公开了一种解决位置传感器异常的控制系统,应用于实施例一的一种解决位置传感器异常的控制方法,包括有电机控制器部分、电机、电门锁、档位开关、电子油门、仪表和电脑参数设置端口,而本实施例主要对电机控制器中的旋变解码电路进行限定。
[0053]
在本实施例中,旋变解码电路包括旋变数字转换器、两路信号放大电路和两路推挽电路;旋变数字转换器的正弦波激励负信号和正弦波激励正信号分别与一路的信号放大电路的一输入端电连接,每一路信号放大电路的另一输入端均连接偏置电压电路,每一路信号放大电路的输出端与一路推挽电路的输入端电连接,每一路推挽电路的输出端与电机的一激励端电连接。
[0054]
其中,旋变数字转换器的正弦正端、正弦负端、余弦正端和余弦负端分别经过一rc滤波电路和一负载电阻之后输出到四个对应电机旋变输出信号端,电机旋变输出信号还电连接有偏置电压电路。
[0055]
其中,旋变数字转换器还包括电源滤波电容、振荡电路和外围连接电路;
[0056]
旋变数字转换器通过外围连接电路与主控芯片电连接,振荡电路为旋变数字转换器提供基准频率。
[0057]
结合附图5可知,本旋变数字转换器采用ad公司的解码芯片ad2s1210,是一款10位至16位分辨率旋变数字转换器,集成片上可编程正弦波振荡器,为旋变器提供正弦波激励,其中图5中旋变数字转换器提供其端口编号,因此,依据上述限定的解码芯片和图5中的端口编号可以清楚无误的知晓其端口名称。
[0058]
其中,旋变数字转换器的正弦波激励负信号通过电阻r241、电阻r242、电容c127到信号放大电路,电阻r127为放大电路输入电阻,电容c83为相位补偿,电阻r131为放大比例电阻,运放输出信号经过电阻r221、d18、电阻r125、电阻r129给推挽电路三极管n19、p9提供驱动信号,电阻r124、电阻r134为三极管n19、p9提供偏置电压,电阻r126、电阻r211、电阻r128、电阻r233和三极管n19、p9组成推挽电路,推挽输出信号经过由电容c45、电阻r222、电容c91组成的π型滤波电路输出到电机的激励负(r2)。
[0059]
其中,旋变数字转换器的正弦波激励正信号通过电阻r243、电阻r244、电容c132到信号放大电路,电阻r123为放大电路输入电阻,电容c139为相位补偿,电阻r130为放大比例电阻,运放输出信号经过电阻r238、d19、电阻r139、电阻r144给推挽电路三极管n21、p10提供驱动信号,电阻r138、电阻r157为三极管n21、p10提供偏置电压,电阻r152、电阻r237、电阻r154、电阻r240和三极管n21、p10组成推挽电路,推挽输出信号经过由电容c136、电阻r239、电容c126组成的π型滤波电路输出到电机的激励正(r1)。
[0060]
其中,电阻r135、电阻r136由电源12v分压给运放提供基准电压,电容c135为基准电压滤波电容;
[0061]
其中,电源 5v经电阻r202、电阻r216分压经电阻r137、电阻r192、电阻r234、电阻r235给电机旋变输出信号cos (s1)、cos-(s3)、sin (s2)、sin-(s4)提供偏置电压。电机旋变输出信号cos (s1)、cos-(s3)经过电阻r119、电阻r120后接入负载电阻r121,两路信号再经电阻r133和电容c81、电阻r201和电容c84组成的rc滤波后输入解码芯片ad2s1210中;电机旋变输出信号sin (s2)、sin-(s4)经过电阻r115、电阻r116后接入负载电阻r122,两路信号再经电阻r232和电容c90、电阻r236和电容c93组成的rc滤波后输入解码芯片ad2s1210中;
[0062]
其中,解码芯片ad2s1210通过电阻r140、电阻r141、电阻r142、电阻r143、电阻r145、电阻r146、电阻r147、电阻r148、电阻r149、电阻r156、电阻r158、电阻r159、电阻r160、电阻r163与主控芯片连结,进行相关数据传送,电路中电容c89、电容c92、电容c94、电容
c95、电容c96、电容c97、电容c140、电容c141是解码芯片ad2s1210的电源滤波电容,电阻r150、电阻r151、电阻r153、电阻r155,晶振x2和电容c137、电容c138组成振荡电路,为解码芯片ad2s1210提供基准频率。
[0063]
在此基础上,为了便于理解,本实施例对所用器件进行以下的型号限定,但不构成对其进行限定,只要器件型号符合其功能限定即可,具体如下:
[0064]
电阻r241的阻值为10,电阻r242的阻值为100k,电容c127为105,电阻r127的阻值为10k,电容c83为120p,电阻r131的阻值为15k,电阻r221的阻值为100,d18选用bavs9a7,电阻r125、电阻r129的阻值为3.3,三极管n19为zxtn2010zia,三极管p9为zxtp2010zia,电阻r124、电阻r134的阻值为2.2k,电阻r126、电阻r128的阻值为10,电阻r211、电阻r233的阻值为20,电容c45为103,电阻r222的阻值为5.1,电容c91为102。
[0065]
电阻r243的阻值为10,电阻r244的阻值为100k,电容c132为105,电阻r123的阻值为10k,电容c139为120p,电阻r130的阻值为15k,电阻r238的阻值为100,d19选用bavs9a7,电阻r139、电阻r144的阻值为3.3,三极管n21为zxtn2010zia,三极管p10zxtp2010zia,电阻r138、电阻r157的阻值为2.2k,电阻r152、电阻r154的阻值为10,电阻r237、电阻r240的阻值为20,电容c136为103,电阻r239的阻值为5.1,电容c126为102。
[0066]
其中,电阻r135的阻值为22k,电阻r136的阻值为10k,电容c135为104,放大器u11a和u11b的型号为ad5662arz。
[0067]
其中,电阻r202、电阻r216的阻值为10k,电阻r137、电阻r192、电阻r234、电阻r235的阻值为100k,电阻r121和电阻r122的阻值为22k,电阻r119、电阻r120、电阻r133、电阻r201、电阻r115、电阻r116、电阻r232和电阻r236的阻值为1k,电容c81、电容c84、电容c90、电容c93为471
[0068]
其中,电阻r140、电阻r141、电阻r142、电阻r143、电阻r145、电阻r146、电阻r147、电阻r148、电阻r149、电阻r156、电阻r158、电阻r159、电阻r160、电阻r163的阻值均为100,电容c89、电容c94、电容c95、电容c140、为106,电容c92、电容c96、电容c97、电容c141为104,电阻r150、电阻r151、电阻r153、电阻r155为的阻值为1k,晶振x2的基准频率为8.192mhz,和电容c137、电容c138为22p。
[0069]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。