技术特征:
1.一种基于感知-锁定-发现的多无人机博弈协同搜索方法,其特征在于包括如下步骤:步骤1:多无人机协同搜索环境与飞行状态建模;步骤2:无人机搜索任务载荷建模;步骤3:建立单无人机目标概率图更新机制;步骤4:多无人机协同搜索目标概率图融合;步骤5:势能博弈求解纳什均衡,纳什均衡点对应当前状态多无人机路径决策的全局或局部最优解。2.根据权利要求1所述的基于感知-锁定-发现的多无人机博弈协同搜索方法,其特征在于上述步骤1的多无人机协同搜索环境与飞行状态建模,具体包括如下步骤:搜索未知环境将环境等分为l
x
×
l
y
大小相同的单元,每个单元g用(x,y)标识;任务无人机标记为第n架无人机位置用(x
n
,y
n
,h
n
)标识,其中h
n
∈[h
min
,h
max
];h
min
,h
max
分别为无人机最小和最大飞行高度;需要搜索的目标标记为第t个目标位置用(x
t
,y
t
)标识,第t个目标位于高度为0的地面上,只要目标位置落于单元中,就代表该单元存在目标;目标客观存在用ω表示,1代表目标在单元中,0代表目标不在单元中;无人机探测结果用ξ表示,1代表在单元中发现目标,0代表在单元中没有发现目标;威胁区域标记为第m个威胁区域用(x
m
,y
m
,r
m
)标识,威胁范围为半球形,其球心位于高度为0的地面上,威胁半径为r
m
;以上各点位置均满足x
n
,x
t
,x
m
∈{1,2,
…
,l
x
}和y
n
,y
t
,y
m
∈{1,2,
…
,l
y
};{θ
n
(t),η
x
(t)}表示第n架无人机在t时刻的飞行状态,分别表示航向转角和高度变化,受无人机飞行性能约束,在t 1时刻无人机的航向在t时刻航向的基础上左转45度、直行或右转45度,需要满足的机动性约束条件如下:|η
n
(t 1)-η
n
(t)|≤η
max
其中,η
max
表示无人机飞行高度最大变化值;无人机的飞行状况还要满足以下约束:d
ij
(t)≥d
safe
(i,j=1,2,
…
,n;i≠j)d
im
(t)≥r
m
(i=1,2,
…
,n;m=1,2,
…
,m)其中,d
ij
表示第i架无人机与第j架无人机之间的距离;d
safe
表示无人机之间的最小安全距离;d
im
表示第i架无人机与第m个威胁物之间的距离。3.根据权利要求1所述的基于感知-锁定-发现的多无人机博弈协同搜索方法,其特征在于上述步骤2的无人机搜索任务载荷建模,具体包括如下步骤:光电载荷探测模型描述了无人机对搜索目标的探测与发现关系;
一般探测概率用p
d
表示,p
d
=p(ξ=1|ω=1);虚警概率用p
f
表示,p
f
=p(ξ=1|ω=0);竖直向下固定安装的光电载荷,由光学成像原理可知,目标在机载光电载荷成像面上的成像大小δ为:式中,h
s
为无人机探测高度,f为光电载荷焦距,d
c
为目标的特征尺寸;探测高度h
s
和探测半径r
s
之间的关系为:式中,β
s
为光电载荷视场角;计算出目标在光电载荷成像靶面上覆盖目标临界尺寸的线对数n为:式中,b为光电载荷的靶面成像尺寸,n
s
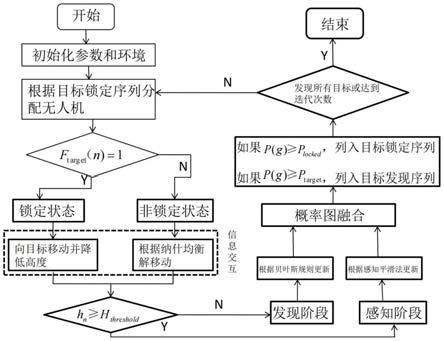
为光电载荷的行扫描线数;对于特定目标的识别,已建立了所需目标分辨率的经验规则,利用johnson准则,给出了特定目标在图像中被发现、定向、识别和确认所需的经验数据,根据数据表可以反向推导出目标传递概率函数的计算公式:4.根据权利要求1所述的基于感知-锁定-发现的多无人机博弈协同搜索方法,其特征在于上述步骤3的单无人机目标概率图更新机制,具体包括如下步骤:多无人机协同搜索是通过无人机对未知环境的感知和无人机之间的信息交互、协同决策执行任务;在整个任务期间,无人机根据任务载荷和相邻无人机的信息做出自己的决策,从而协同执行搜索任务以实现最佳配置;协同搜索包括以下三个部分:任务载荷观测、信息融合和协同运动;在开始搜索之前,每架无人机都将预先了解的环境信息与概率图联系起来,然后无人机根据算法向环境不确定性高的位置移动,确保目标搜索的概率;任务载荷观测减少了相应区域的不确定性,为了进一步提高搜索效率,无人机通过与邻居的通信进行信息融合,从而指导无人机随后的协同运动;然后整个过程循环进行,直到搜索到全部目标或整个任务空间上的概率分布达到阈值。5.根据权利要求1所述的基于感知-锁定-发现的多无人机博弈协同搜索方法,其特征在于上述步骤4的多无人机协同搜索目标概率图融合,具体包括如下步骤:无人机通过信息交互来更新自己的目标概率图,结合自己的信息和获取的信息来融合目标概率图;目标概率图表示为基于网格的概率单元,其中每个单元对应具有相关目标存在概率的离散搜索区域;每个单元都存储一些有用的信息,包括目标存在的概率、环境的不确定程度和情况;结合所有单元,得到用于搜索的认知信息图;f
target
表示无人机是否处于锁定状态,当f
target
=0时表示无人机未分配锁定目标,无人机按照所提算法进行飞行;当f
target
=1时表示无人机已分配锁定目标,无人机开始向目标
移动,同时降低飞行高度来提高载荷的探索概率,确保目标搜索的识别率;p
locked
和p
target
分别表示锁定概率阈值和目标概率阈值,当单元目标存在概率高于p
locked
时,该单元被列入目标锁定序列来分配相应无人机进行更精确的搜索;当单元目标存在概率高于p
target
时,认定该单元存在目标点;h
threshold
表示感知和发现阶段的切换阈值,当飞行高度高于h
threshold
的时候处于感知阶段;当飞行高度低于h
threshold
的时候处于发现阶段;由于感知阶段无人机大多处于飞行较高的情况下,此时载荷的p
d
和p
f
发生较大变化,通过感知平滑法进行概率图更新:其中,ρ表示感知系数,一般取ρ=1-p
d
;发现阶段通过贝叶斯一致性估计更新,降低信息熵作为优化目标,即减小单元内信息的不确定性;s(t)=-p(t)log2p(t)-(1-p(t))log2(1-p(t))。6.根据权利要求1所述的基于感知-锁定-发现的多无人机博弈协同搜索方法,其特征在于上述步骤5的势能博弈求解纳什均衡,纳什均衡点对应当前状态多无人机路径决策的全局或局部最优解,具体包括如下步骤:将多无人机博弈模型记为其中为博弈参与者的集合,即任务无人机的集合;为第n架无人机的动作集合;u
n
为第n架无人机的效用函数;如果动作策略集其中和使得效用函数满足:则a
*
属于博弈模型的纯策略纳什均衡点,其中a-n
表示除了n之外所有参与者的动作策略;如果存在精确势能函数φ使得满足:u(a
n
′
,a-n
)-u(a
n
,a-n
)=φ(a
n
′
,a-n
)-φ(a
n
,a-n
)则该博弈被称为精确势能博弈。
技术总结
一种基于感知-锁定-发现的多无人机博弈协同搜索方法,属于多无人机协同搜索的技术领域。首先多无人机协同搜索建立环境模型和初始化参数;其次无人机任务载荷参数设置,完成多无人机飞行决策势能博弈;最后通过感知-锁定-发现机制目标概率图更新。本发明通过对目标的搜索更新环境概率图,从而降低整体环境的不确定性;提出感知-锁定-发现的搜索机制,增大了目标的发现概率,提出较大值概率图融合方法,在克服自身信息的局限性同时,提高信息融合的有效性和准确性;通过势能博弈方法,有利于多无人机自主决策控制,保证整体的搜索效能。本发明尤其适用于在无人机任务载荷性能较低的情况下提升效果显著,具有很好的应用前景。具有很好的应用前景。具有很好的应用前景。
技术研发人员:郭艳 周彬 李宁 刘存涛 刘杰 宋晓祥 薛端
受保护的技术使用者:中国人民解放军陆军工程大学
技术研发日:2021.09.30
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。