技术特征:
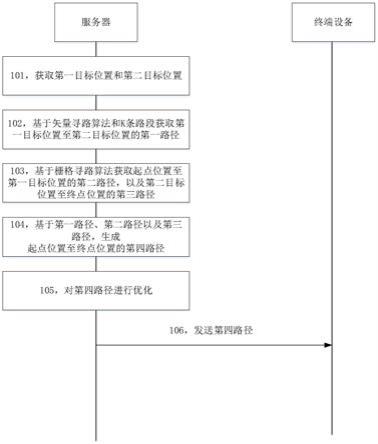
1.一种导航方法,其特征在于,包括:获取第一目标位置和第二目标位置,所述第一目标位置为k条路段上距离起点位置最近的位置,所述第二目标位置为所述k条路段上距离终点位置最近的位置,k为正整数;基于矢量寻路算法和所述k条路段获取所述第一目标位置至所述第二目标位置的第一路径;基于栅格寻路算法获取所述起点位置至所述第一目标位置的第二路径,以及所述第二目标位置至所述终点位置的第三路径;基于所述第一路径、所述第二路径以及所述第三路径,生成所述起点位置至所述终点位置的第四路径,所述第四路径用于导航。2.根据权利要求1所述的方法,其特征在于,所述获取第一目标位置包括:基于所述起点位置的三维数据及所述k条路段的三维数据确定所述k条路段中距离所述起点位置最近的一条路段;从距离所述起点位置最近的一条路段上确定第一目标位置。3.根据权利要求2所述的方法,其特征在于,所述基于所述起点位置的三维数据及所述k条路段的三维数据确定所述k条路段中距离所述起点位置最近的一条路段包括:基于所述起点位置的高度数据及可行区域的高度数据从所述可行区域包含的多层区域中,确定所述起点位置所在的目标层区域,所述目标层区域为所述多层区域中的一层;基于所述k条路段的高度数据确定所述起点位置所在的目标层区域包含的v条路段,v为小于或等于k的正整数;基于所述起点位置的水平方向的数据及所述v条路段的水平方向的数据,从所述v条路段中确定距离所述起点位置最近的一条路段。4.根据权利要求2或3所述的方法,其特征在于,所述基于所述起点位置的三维数据及所述k条路段的三维数据确定所述k条路段中距离所述起点位置最近的一条路段包括:基于所述起点位置的水平方向的数据及所述k条路段的水平方向的数据,从所述k条路段中确定在水平方向上与所述起点位置的距离小于第一阈值的m条路段,m为小于或等于k的正整数;基于所述起点位置的高度数据及所述m条路段的高度数据从所述m条路段中确定满足目标条件的n条路段,n为小于或等于m的正整数;基于所述起点位置的三维数据及所述k条路段的三维数据,从所述n条路段中确定距离所述起点位置最近的一条路段。5.根据权利要求4所述的方法,其特征在于,所述目标条件包括:路段的高度数据的取值大于所述起点位置的高度数据的取值与第三阈值的差,且小于所述起点位置的高度数据的取值与第二阈值的和。6.根据权利要求5所述的方法,其特征在于,所述第二阈值小于所述第三阈值。7.根据权利要求1至6中任意一项所述的方法,其特征在于,所述基于栅格寻路算法获取所述起点位置至所述第一目标位置的第二路径包括:获取构成可行区域的p个栅格,所述p个栅格中包含所述起点位置对应的栅格和所述终点位置对应的栅格,p为大于2的正整数;从q个候选栅格中选取一个候选栅格作为所述第三目标位置对应的栅格,所述q个候选
栅格属于所述p个栅格,q为小于p的正整数;连接所述起点位置对应的栅格与所述第三目标位置对应的栅格;从l个候选栅格中选取一个候选栅格作为所述第四目标位置对应的栅格,所述l个候选栅格属于所述p个栅格,l为小于p的正整数;连接所述第三目标位置对应的栅格与所述第四目标位置对应的栅格;重复上述步骤,直到连接到所述第一目标位置对应的栅格,以得到所述起点位置至所述第一目标位置的第二路径。8.根据权利要求7所述的方法,其特征在于,所述l个候选栅格不包含所述q个候选栅格,且不包含所述q个候选栅格满足目标位置关系的至少一个栅格。9.根据权利要求7或8的方法,其特征在于,在所述获取构成所述可行区域的p个栅格之后,在所述从q个候选栅格中选取一个栅格作为所述第三目标位置对应的栅格之前,所述方法还包括:基于选取规则从所述p个栅格中选取所述从q个候选栅格;所述选取规则包括候选栅格的第一水平方向的坐标和候选栅格的第二水平方向的坐标,所述第一水平方向与所述第二水平方向垂直;候选栅格的第一水平方向的坐标等于所述起点位置对应的栅格的第一水平方向的坐标与第一偏移量的和,所述第一偏移量等于第一步长与第一角度的余弦值的乘积,所述第一步长等于初始步长与第一步长增量的和,所述步长增量等于第一累积次数与每次累积的步长增量的乘积,第一角度等于初始角度与第一角度增量的和,第一角度增量等于第二累积次数与每次累积的角度增量的乘积;候选栅格的第二水平方向的坐标等于所述起点位置对应的栅格的第二水平方向的坐标与第二偏移量的和,所述第二偏移量等于所述第一步长与所述第一角度的正弦值的乘积。10.根据权利要求1至9中任意一项所述的方法,其特征在于,所述方法还包括:对所述第四路径进行优化。11.根据权利要求10所述的方法,其特征在于,所述对所述第四路径进行优化包括:确定可行区域中的可优化区域;对所述第四路径位于所述可优化区域的部分进行优化。12.根据权利要求11所述的方法,其特征在于,所述第四路径上存在第五目标位置和第六目标位置,且所述第五目标位置和所述第六目标位置均位于所述可优化区域;所述对所述第四路径位于所述可优化区域的部分进行优化包括:基于所述第五目标位置和所述第六目标位置之间不存在障碍物,且第四路径位于所述第五目标位置和所述第六目标位置之间的部分为非直线路径,将所述非直线路径替换为由所述第五目标位置至所述第六目标位置的直线路径。13.根据权利要求1至12中任意一项所述的方法,其特征在于,所述方法还包括:向终端设备发送所述第四路径,使得所述终端设备根据所述第四路径进行导航。14.一种导航方法,其特征在于,包括:获取起点位置至终点位置的第四路径;显示所述第四路径;
基于用户的位置与所述第四路径的位置显示导引线,所述导引线用于指示所述用户沿所述第四路径向所述终点位置移动。15.根据权利要求14所述的方法,其特征在于,所述第四路径是由多个参考位置依次连接形成,相邻两个参考位置连接形成一条子路径;所述多个参考位置包括依次连接的第一参考位置、第二参考位置和第三参考位置,所述第一参考位置与所述第二参考位置连接形成第一子路径,所述第二参考位置与所述第三参考位置连接形成第二子路径,所述第一子路径和所述第二子路径形成目标角,所述第二参考位置为所述多个参考位置中距离用户的位置最近的参考位置,所述第三参考位置为位于所述第二参考位置与所述终点位置之间,或所述第三参考位置为所述终点位置;所述基于用户的位置与所述第四路径的位置显示导引线包括:基于所述用户的位置和所述第三参考位置位于所述第一子路径的同侧,且用户的位置位于所述目标角的角平分线与所述第一子路径之间,显示从所述用户的位置到所述第二参考位置的导引线。16.根据权利要求14或15所述的方法,其特征在于,所述第四路径是由多个参考位置依次连接形成,相邻两个参考位置连接形成一条子路径;所述多个参考位置包括依次连接的第一参考位置、第二参考位置和第三参考位置,所述第一参考位置与所述第二参考位置连接形成第一子路径,所述第二参考位置与所述第三参考位置连接形成第二子路径,所述第一子路径和所述第二子路径形成目标角,所述第二参考位置为所述多个参考位置中距离用户的位置最近的参考位置,所述第三参考位置为位于所述第二参考位置与所述终点位置之间,或所述第三参考位置为所述终点位置;所述基于用户的位置与所述第四路径的位置显示导引线包括:基于所述用户的位置和所述第三参考位置位于所述第一子路径的同侧,且所述用户的位置位于所述目标角的角平分线与所述第二子路径之间,显示从所述用户的位置到所述第三参考位置的导引线。17.根据权利要求14至16中任意一项所述的方法,其特征在于,所述第四路径是由多个参考位置依次连接形成,相邻两个参考位置连接形成一条子路径;所述多个参考位置包括依次连接的第一参考位置、第二参考位置和第三参考位置,所述第一参考位置与所述第二参考位置连接形成第一子路径,所述第二参考位置与所述第三参考位置连接形成第二子路径,所述第一子路径和所述第二子路径形成目标角,所述第二参考位置为所述多个参考位置中距离用户的位置最近的参考位置,所述第三参考位置为位于所述第二参考位置与所述终点位置之间,或所述第三参考位置为所述终点位置;所述基于用户的位置与所述第四路径的位置显示导引线包括:基于所述用户的位置和所述第三参考位置位于所述第一子路径的两侧,且所述用户的位置和所述第一参考位置位于所述第二子路径的反向延长线的同侧,显示从所述用户的位置到所述第二参考位置的导引线。18.根据权利要求14至17中任意一项所述的方法,其特征在于,所述第四路径是由多个参考位置依次连接形成,相邻两个参考位置连接形成一条子路径;所述多个参考位置包括依次连接的第一参考位置、第二参考位置和第三参考位置,所述第一参考位置与所述第二参考位置连接形成第一子路径,所述第二参考位置与所述第三
参考位置连接形成第二子路径,所述第一子路径和所述第二子路径形成目标角,所述第二参考位置为所述多个参考位置中距离用户的位置最近的参考位置,所述第三参考位置为位于所述第二参考位置与所述终点位置之间,或所述第三参考位置为所述终点位置;所述基于用户的位置与所述第四路径的位置显示导引线包括:基于所述用户的位置和所述第三参考位置位于所述第一子路径的两侧,且所述用户的位置和所述第一参考位置位于所述第二子路径的反向延长线的两侧,显示从所述用户的位置到所述第三参考位置的导引线。19.根据权利要求14至18中任意一项所述的方法,其特征在于,所述第四路径是由多个参考位置依次连接形成,所述导引线在第四参考位置处的高度等于所述第四参考位置的高度与特定高度的和,所述第四参考位置为所述多个参考位置中的任意一个。20.根据权利要求14至19中任意一项所述的方法,其特征在于,所述第四路径是由多个参考位置依次连接形成,所述方法还包括:基于用户的位置位于电梯区域,且第五参考位置的属性信息指示用户乘坐电梯,显示指示信息,所述指示信息指示用户乘坐电梯,所述第五参考位置为所述多个参考位置中距离用户的位置最近的一个参考位置。21.一种导航装置,其特征在于,包括:位置获取单元,用于获取第一目标位置和第二目标位置,所述第一目标位置为k条路段上距离起点位置最近的位置,所述第二目标位置为所述k条路段上距离终点位置最近的位置,k为正整数;路径获取单元,用于基于矢量寻路算法和所述k条路段获取所述第一目标位置至所述第二目标位置的第一路径;路径获取单元,还用于基于栅格寻路算法获取所述起点位置至所述第一目标位置的第二路径,以及所述第二目标位置至所述终点位置的第三路径;路径生成单元,用于基于所述第一路径、所述第二路径以及所述第三路径,生成所述起点位置至所述终点位置的第四路径,所述第四路径用于导航。22.一种导航装置,其特征在于,包括:获取单元,用于获取起点位置至终点位置的第四路径;显示单元,用于显示所述第四路径;显示单元,用于基于用户的位置与所述第四路径的位置显示导引线,所述导引线用于指示所述用户沿所述第四路径向所述终点位置移动。23.一种服务器,其特征在于,包括:至少一个处理器和存储器,存储器存储有可在处理器上运行的计算机执行指令,当所述计算机执行指令被所述处理器执行时,所述处理器执行如上述权利要求1-13中任意一项所述的方法。24.一种终端设备,其特征在于,包括:至少一个处理器和存储器,存储器存储有可在处理器上运行的计算机执行指令,当所述计算机执行指令被所述处理器执行时,所述处理器执行如上述权利要求14-20中任意一项所述的方法。25.一种存储一个或多个计算机执行指令的计算机可读存储介质,其特征在于,当所述计算机执行指令被处理器执行时,所述处理器执行如上述权利要求1-20中任意一项所述的方法。
26.一种导航系统,其特征在于,包括:终端设备和服务器;所述服务器用于执行如上述权利要求1-13中任意一项所述的方法;所述终端设备用于执行如上述权利要求14-20中任意一项所述的方法。
技术总结
本申请实施例公开了一种导航方法、设备及系统,能够准确地规划出用于导航的路径。本申请实施例方法包括:获取第一目标位置和第二目标位置,第一目标位置为K条路段上距离起点位置最近的位置,第二目标位置为K条路段上距离终点位置最近的位置,K为正整数;基于矢量寻路算法和K条路段获取第一目标位置至第二目标位置的第一路径;基于栅格寻路算法获取起点位置至第一目标位置的第二路径,以及第二目标位置至终点位置的第三路径;基于第一路径、第二路径以及第三路径,确定起点位置至终点位置的第四路径,第四路径用于导航。第四路径用于导航。第四路径用于导航。
技术研发人员:康泽慧 杨浩 李威阳
受保护的技术使用者:华为技术有限公司
技术研发日:2020.09.09
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。