1.本实用新型涉及操纵杆领域,尤其涉及一种单轴式操纵杆。
背景技术:
2.现有的操作杆作为机械机构的控制操作用传感器,主要由手柄和检测手柄状态测量装置组成。手柄可以做单轴运动,也可以做多轴运动,测量装置检测手柄位置并通过电气接口对外发出位置信号。
3.当前的操纵杆品采用的是球头万向节结构,实现该结构需要多个配件,且涉及多位置滑动配合,配合面又都是球面或异形面,加工难度高,且成本大。现在通用做法是采用模具成型方式,为了提高产品机械强度和耐磨性,常选用锌合金材质。
技术实现要素:
4.为了解决上述现有技术中的操纵杆结构复杂,加工难度大成本高的缺陷,本实用新型提出了一种单轴式操纵杆。
5.本实用新型采用以下技术方案:
6.一种单轴式操纵杆,包括:基座、摆杆、转轴、摩擦部和弹性阻尼部;
7.转轴转动安装在基座上,摆杆固定设置在转轴上,且摆杆上端伸出基座;
8.弹性阻尼部设置在摆杆上且弹性阻尼部的伸缩方向平行于摆杆轴线方向,摩擦部设置在摆杆上并可沿着摆杆轴线方向滑动,摩擦部与弹性阻尼部的自由端接触,摩擦部抵靠基座;摆杆摆动过程中带动转轴转动,基座对摩擦部进行运动限位使得摩擦部与摆杆相对运动并带动弹性阻尼部变形,摩擦部在弹性阻尼部的恢复力作用下相对于基座产生阻尼运动以提供操作手感。
9.优选的,还包括与转轴相对静止设置的永磁体、用于感应永磁体的霍尔传感器以及用于根据霍尔传感器的感应值计算转轴旋转角度的处理器。
10.优选的,包含所述霍尔传感器和所述处理器的电路板和转轴均设置在基座内部,且所述电路板和转轴之间有间隙。
11.优选的,电路板位于转轴的轴线方向上,且永磁体设置在转轴靠近电路板的端面上。
12.优选的,基座上设有导向部,摩擦部与导向部滑动,摩擦部随着摆杆的摆动沿着导向部滑动,且摩擦部在导向部上的滑动轨迹异于以转轴的轴线为中心线的圆,使得摩擦部在导向部上滑动的同时也相对于摆杆在摆杆轴线方向上滑动,以加大弹性阻尼部的形变。
13.优选的,导向部为设置在基座内部的导轨槽,且所述导轨槽为以初始状态下的摆杆的轴线为对称轴的对称结构。
14.优选的,弹性阻尼部套设在摆杆朝下伸出基座的下端部上。
15.优选的,摆杆上设有挡板,弹性阻尼部夹持在挡板与摩擦部之间。
16.优选的,转轴位于设置在基座内部的圆柱腔中,转轴与基座通过圆柱面滑动配合。
17.本实用新型的优点在于:
18.(1)本实用新型中,摆杆驱动转轴与基座之间相对旋转,结构简单,易于加工。
19.(2)本实用新型中,摩擦部随着摆杆的摆动而运动,基座对摩擦部的运动进行限位,使得摩擦部在摆杆运动过程中相对于摆杆在摆杆轴线方向上滑动,弹性阻尼部随着摩擦部在摆杆轴线方向上的运动而同步伸缩,弹性阻尼部变形后其恢复力反过来作用于摩擦部,使得摩擦部与基座之间产生阻尼运动,使得操作人员产生手感。
20.(3)本实用新型中,永磁体随着转轴的转动而相对于霍尔传感器发生位置变化,处理器根据霍尔传感器的感应值可推算永磁体的转动量,从而计算转轴的转动角度,即实现对工作人员通过摆杆输入的操作量的监控。
21.(4)本实用新型中,电路板和转轴之间有间隙,以避免电路板与转轴之间发生摩擦损伤。永磁体设置在转轴靠近电路板的端面上,提高了霍尔传感器对永磁体的感应精度
22.(5)本实用新型中,导向部的设置,使得摩擦部的运动更加稳定可靠,使得摆杆摆动过程中,摩擦部与基座之间的阻尼变化更加平稳,进一步提高了操纵手感。
23.(6)导向部采用对称结构,摆杆向相反方向摆动相同角度时,弹性阻尼部的形变长度相同,即摩擦部与导向部之间的阻尼相同,从而方便工作人员熟悉手感,有利于操作人员缩短熟悉时间。
24.(7)本实用新型中,弹性阻尼部套设在摆杆朝下伸出基座的下端部上。如此,即避免了基座对弹性阻尼部和摆杆的运动进行限制,又减小了基座的体积,从而减小了整个操纵杆的体积,简化了构造。
附图说明
25.图1为本实用新型提出的一种单轴式操纵杆结构图;
26.图2为图1的正视图;
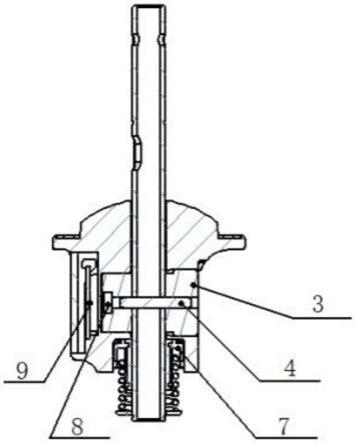
27.图3为图2的a-a剖视图;
28.图4为摆杆摆动状态示意图。
29.图示:1、摆杆;2、基座;3、转轴;4、用于固定转轴和摆杆的销钉;5、弹性阻尼部;6、挡板;7、摩擦部;8、永磁体;9、电路板。
具体实施方式
30.本实施方式提出的一种单轴式操纵杆,包括:基座2、摆杆1、转轴3、摩擦部7和弹性阻尼部5。
31.转轴3转动安装在基座2上,摆杆1固定设置在转轴3上,且摆杆1上端伸出基座2,以便通过摆杆1带动转轴3转动,已实现操纵信号的输入。
32.具体的,本实施方式中,转轴3位于设置在基座2内部的圆柱腔中,转轴3 与基座2通过圆柱面滑动配合。圆柱面加工难度低,更容易控制精度,从而提高操纵杆的操作精度。
33.弹性阻尼部5设置在摆杆1上且弹性阻尼部5的伸缩方向平行于摆杆1轴线方向。摩擦部7设置在摆杆1上并可沿着摆杆1轴线方向滑动,摩擦部7与弹性阻尼部5的自由端接触,摩擦部7抵靠基座2。摆杆1摆动过程中带动转轴 3转动,基座2对摩擦部7进行运动限位使得摩擦部7与摆杆1相对运动并带动弹性阻尼部5变形,摩擦部7在弹性阻尼部5的恢复力作用
下相对于基座2产生阻尼运动以提供操作手感。即,本实施方式中,摩擦部7随着摆杆1的摆动而运动,基座2对摩擦部7的运动进行限位,使得摩擦部7在摆杆1运动过程中相对于摆杆1在摆杆1轴线方向上滑动,弹性阻尼部5随着摩擦部7在摆杆1 轴线方向上的运动而同步伸缩,弹性阻尼部5变形后其恢复力反过来作用于摩擦部7,使得摩擦部7与基座2之间产生阻尼运动,使得操作人员产生手感。
34.具体的,本实施方式中,摆杆1运动过程中,摩擦部7相对于基座2的运动轨迹异于以转轴3的轴线为中心线的圆,以保证弹性阻尼部5的形变量随着摆杆1的摆动角度的变化而变化。
35.具体的,本实施方式中,基座2上设有导向部21,摩擦部7与导向部21滑动配合,摩擦部7随着摆杆1的摆动沿着导向部21滑动,且摩擦部7在导向部 21上的滑动轨迹异于以转轴3的轴线为中心线的圆,使得摩擦部7在导向部21 上滑动的同时也相对于摆杆1在摆杆1轴线方向上滑动,以加大弹性阻尼部5 的形变。导向部21的设置,使得摩擦部7的运动更加稳定可靠,使得摆杆1摆动过程中,摩擦部7与基座2之间的阻尼变化更加平稳,进一步提高了操纵手感。
36.本实施方式中,导向部21为设置在基座2内部的导轨槽,且所述导轨槽为以初始状态下的摆杆1的轴线为对称轴的对称结构。如此,摆杆1向相反方向摆动相同角度时,弹性阻尼部5的形变长度相同,即摩擦部7与导向部21之间的阻尼相同,从而方便工作人员熟悉手感,有利于操作人员缩短熟悉时间。
37.具体实施时,可设置摩擦部7在导向部21上的滑动轨迹为直线。如此,摩擦部7相对于基座2的运动轨迹为直线,摩擦部7与摆杆1配合形成斜楔机构。
38.具体的,本实施方式中,弹性阻尼部5套设在摆杆1朝下伸出基座2的下端部上。如此,即避免了基座2对弹性阻尼部5和摆杆1的运动进行限制,又减小了基座2的体积,从而减小了整个操纵杆的体积,简化了构造。
39.本实施方式中,摆杆1上设有挡板6,弹性阻尼部5夹持在挡板6与摩擦部 7之间,使得弹性阻尼部5与摩擦部7之间实现非固定连接,减小了对摩擦部7 的运动束缚,进一步提高了摩擦部7相对于基座2进行运动的可靠性。具体的,本实施方式中,摩擦部7的运动轨迹为垂直于转轴3轴线的水平直线,当摆杆1 运动时,随着摩擦部7的滑动,摩擦部7与挡板6之间在摆杆1轴线方向上的距离越来越短,弹性阻尼部5的压缩量越来越大,从而恢复力越来越大,使得摩擦部7与基座2之间的阻尼越来越大。
40.本实施方式中,弹性阻尼部5可具体采用弹簧。且,当摆杆1处于复位状态时,弹性阻尼部5处于原长状态。
41.本实施方式中,还包括与转轴3相对静止设置的永磁体8、用于感应永磁体 8的霍尔传感器以及用于根据霍尔传感器的感应值计算转轴3旋转角度的处理器。如此,永磁体8随着转轴3的转动而相对于霍尔传感器发生位置变化,处理器根据霍尔传感器的感应值可推算永磁体8的转动量,从而计算转轴3的转动角度,即实现对工作人员通过摆杆1输入的操作量的监控。
42.本实施方式中,包含所述霍尔传感器和所述处理器的电路板9和转轴3均设置在基座2内部,且所述电路板9和转轴3之间有间隙,以避免电路板9与转轴3之间发生摩擦损伤。且电路板9位于转轴3的轴线方向上,且永磁体8 设置在转轴3靠近电路板9的端面上,以提
高霍尔传感器对永磁体8的感应精度。
43.以上仅为本实用新型创造的较佳实施例而已,并不用以限制本实用新型创造,凡在本实用新型创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型创造的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。