1.本发明是一种应用电动汽车的车载飞轮储能装置(也称飞轮电池),具体为一种五自由度悬浮支承的车载储能装置。
背景技术:
2.飞轮储能装置是一种高度机电一体化的储能装置,主要结构包括飞轮、支承轴承、电动/发电机、电力电子变换器、真空室。与其他常见的储能技术相比,飞轮储能有着功率密度高、储能密度高、效率高、响应时间短、使用寿命长、绿色环保等优点,是电动汽车的理想动力电池之一。然而,目前制约电动汽车上使用的飞轮储能装置发展的主要挑战是它的空间占有率仍较大(轴向长度大)、储能能力仍有待提高、性价比低、安全性能难以保障以及稳定悬浮难度大等技术性瓶颈。
3.储能特性方面:突出表现为飞轮电池的储能密度,其除了与材料的许用应力和密度相关,还与飞轮的形状紧密联系;形状系数越大,储能密度越高。一般地,飞轮的断面形状有矩形、圆形、椭圆形、菱形等十多种,对应的飞轮形状不同,其形状系数大小也不一致,其中等应力圆盘的形状系数最高。
4.转矩与悬浮特性方面:磁悬浮开关磁阻电机(bsrm)可以同时产生驱动负载的电磁转矩和使转子稳定悬浮的悬浮力。由于传统单绕组bsrm中悬浮力和转矩的产生均源于电机定转子齿极间的磁拉力,并且两者的产生区间相互重叠,因而在使用一套绕组同时产生转矩和悬浮力时,两者将在控制时不可避免地相互影响,产生控制上的耦合。通常解决bsrm转矩与悬浮力耦合问题的思路主要有两条,其一是基于传统结构的bsrm,通过对电机数学模型的优化或重新建模,提高对相电流控制的精确度,以期实现转矩和悬浮力的独立调控。其二是设计制造结构上具有天然解耦功能的bsrm新型本体拓扑。
5.性价比方面:一般地,为满足系统储能量大的要求,飞轮材料多选用高韧性复合材料制成,但是此类材料价格不经济,不符合低成本性目标。相比较下,要实现同等储存能量的要求,可采用价格低廉的纯合金钢材料,但其重量和体积要成倍增加,不适合高集成度的车载场合。因此充分发挥两种材料的优势,且合理设计复合材料和金属材料的配比,进而保证飞轮储能性能与成本具有重要意义。
技术实现要素:
6.基于上述现有技术的不足,本发明提供了一种提升飞轮强度的同时又能增强储能能力的五自由度悬浮支承的车载储能装置。
7.本发明的技术方案为:一种五自由度悬浮支承的车载储能装置,包括外壳1、辅助轴承2、混合磁轴承3、飞轮转子4、磁悬浮开关磁阻电机5和飞轮转轴6;在外壳1上端盖11的圆柱凸台111上设置轴向传感器孔1111,同时在周向设置四个呈90
°
圆周布置的径向传感器孔1112,辅助轴承2安装在支撑架112与外壳1所固定的槽中,支撑架112 与外壳通过螺栓连接;飞轮转轴6上依次套装混合磁轴承3、飞轮转子4、磁悬浮开关磁阻电机5,飞轮转子4固定
在飞轮转轴6上;混合磁轴承3使飞轮转子4克服重力,保证飞轮转子4稳定悬浮,同时给飞轮提供轴向单自由度;混合磁轴承3能给转轴6提供径向二自由度的扭转,磁悬浮开关磁阻电机5能给转轴6提供径向二自由度的悬浮,从而实现飞轮储能装置的五自由度稳定悬浮。
8.进一步,混合磁轴承3包括扭转定子32、扭转转子33、扭转永磁体34、上斥力永磁体35、下斥力永磁体36和导磁体37;扭转定子32与外壳上端盖11通过周向设置的四个螺栓连接,扭转转子33与转轴固定,扭转永磁体34与扭转定子32通过磁力固定,扭转永磁体34沿轴向正方向充磁,上斥力永磁体35固定在飞轮转子4上,充磁方向沿轴向负方向,下斥力永磁体36充磁方向与上斥力永磁体35相反,为轴向正方向;导磁体37 与下斥力永磁体36通过磁力固定,导磁体37与飞轮外壳12通过周向设置的四个螺栓连接,永磁体的材料均采用汝铁硼材料。
9.进一步,所述扭转永磁体34与下端的上斥力永磁体35和下斥力永磁体36一起使飞轮转子4克服重力。
10.进一步,所述扭转永磁体34与飞轮转子4间留有0.5mm的轴向气隙;下斥力永磁体 36与上斥力永磁体35之间留有0.5mm轴向气隙。
11.进一步,所述磁悬浮开关磁阻电机5为三相双凸极12/4结构,磁悬浮开关磁阻电机5 包括电机绕组53、电机定子52和电机转子54,电机定子固定在电机支撑架51上,电机定子52和电机转子53之间留有径向气隙,电机定子52上叠绕有电机绕组53,辅助轴承4 安装在支撑架51内;该电机定子的每个齿极上有单独的绕组,分别独立控制以产生转矩和悬浮力;所述磁悬浮开关磁阻电机5的电机转子54与转轴6固定,电机定子52安装在电机支撑架51内,辅助轴承2安装在电机支撑架51与外壳1所固定的槽中,电机支撑架51与外壳13通过螺栓固定。
12.进一步,磁悬浮开关磁阻电机5中,当a相电感处于上升区时,表示对该相的四个齿进行均衡励磁以产生转矩,此时该相称为转矩相;b相或c相必有一相电感处于最大电感平顶区,表示对该相的四个齿进行不对称励磁以产生悬浮力,此时该相称为悬浮相;在两相同时导通的区间,开通的两相依据各自的控制逻辑和反馈量控制电流,互不影响,实现了转矩与悬浮力在产生机理上的自然解耦。
13.本发明与现有技术相比的有益效果在于:
14.1、本发明能够实现飞轮的五自由度悬浮,具体表现为扭转三极混合磁悬浮轴承、轴向被动斥力永磁轴承和磁悬浮开关磁阻电机。其中,磁悬浮开关磁阻电机提供转矩的同时又能提供径向悬浮力,与传统的五自由度飞轮储能装置相比可以省去一个径向磁轴承,缩短了装置的轴向长度,提高了装置的集成度。
15.2、本发明中的飞轮形状设计为等应力圆盘状,其形状系数可达0.9左右,有力提升系统的储能密度。形状系数是一个反映飞轮储能密度与飞轮材料比强度之间成正比关系的无量纲比例系数,当飞轮转子的形状系数趋近于1时,飞轮材料利用率越大。
16.3、本发明设计的飞轮转子轮毂采用材料为合金钢,轮缘配合使用复合材料,最大限度满足高性价比要求。虽然与纯金属飞轮相比成本较高,但其带来的储能效果远优于纯金属飞轮。同样地,较纯复合材料而言,虽储能性不及,但可节约大量成本,提升飞轮强度的同时又能增强储能能力,性价比较高。
17.4、本发明中依靠轴向斥力永磁轴承抵消飞轮重力的同时,还能补偿扭转混合磁轴
承永磁体在轴向气隙中的磁吸力。其不仅能够防止飞轮因跌落而产生的安全性问题,增强系统安全可靠能力,且能提供稳定的轴向悬浮力。
附图说明
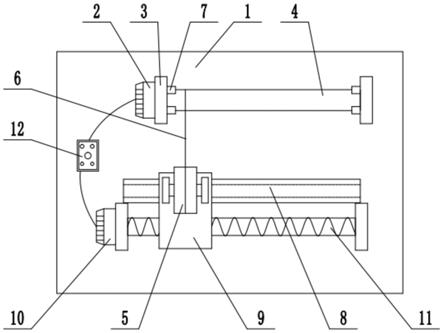
18.图1为本发明结构立体图;
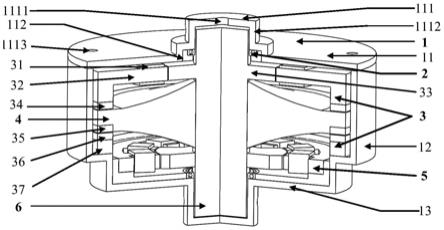
19.图2为磁轴承与飞轮装配剖视图;
20.图3为电机装配剖视图;
21.图4为磁悬浮开关磁阻电机俯视图;
22.图中:1.外壳;11.外壳上端盖;111.上端盖圆柱凸台;1111.轴向传感器上孔;1112. 径向传感器孔;112.轴承支撑架;
23.2.辅助轴承;
24.3.三自由度磁轴承;31.磁轴承线圈;32.扭转定子;33.磁轴承转子;34.扭转永磁体;35.上斥力永磁体;36.下斥力永磁体;37.导磁体;
25.4.飞轮转子;41.飞轮轮毂;42.飞轮轮缘;
26.5.磁悬浮开关磁阻电机;51.电机支撑架;52.电机定子;53.电机线圈;54.电机转子;
27.6.飞轮转轴;
具体实施方式
28.如图1-4所示,本发明包括外壳1、辅助轴承2、混合磁轴承3、飞轮转子4、磁悬浮开关磁阻电机5和飞轮转轴6。如图1所示,在外壳上端盖11的圆柱凸台111上设置轴向传感器孔1111,同时在周向设置四个呈90
°
圆周布置的径向传感器孔1112,上辅助轴承2安装在支撑架112与外壳1所固定的槽中,支撑架112与外壳通过螺栓连接。飞轮转轴6上依次套装混合磁轴承3、飞轮转子4、磁悬浮开关磁阻电机5。混合磁轴承的扭转定子32与外壳上端盖11通过螺栓连接,扭转转子33与转轴固定,混合磁轴承3 能给转轴6提供径向二自由度的扭转。飞轮转子4固定在飞轮转轴6上,扭转永磁体34 与下端的上斥力永磁体35和下斥力永磁体36一起使飞轮转子4克服重力,保证飞轮转子4稳定悬浮,同时给飞轮提供轴向单自由度。磁悬浮开关磁阻电机5的转子54与转轴 6固定,电机定子52安装在电机支撑架51内,辅助轴承2安装在电机支撑架51与外壳 1所固定的槽中,电机支撑架51与外壳13通过螺栓固定,磁悬浮开关磁阻电机5能给转轴6提供径向二自由度的悬浮。从而实现飞轮储能装置的五自由度稳定悬浮。
29.如图2所示,本发明所采用的混合磁轴承包括扭转定子32、扭转转子33、扭转永磁体34、上斥力永磁体35、下斥力永磁体36和导磁体37。扭转定子32与外壳上端盖 11通过周向设置的四个螺栓连接,扭转永磁体34与扭转定子32通过磁力固定,扭转永磁体34沿轴向正方向充磁,扭转永磁体34与飞轮转子4间留有0.5mm的轴向气隙。上斥力永磁体35固定在飞轮转子4上,充磁方向沿轴向负方向,下环永磁环36充磁方向与上斥力永磁体35相反,为轴向正方向。下斥力永磁体36与上斥力永磁体35之间留有0.5mm 轴向气隙。导磁体37与下斥力永磁体36通过磁力固定,导磁体37与飞轮外壳12通过周向设置的四个螺栓连接。永磁体的材料均采用汝铁硼材料。
30.如3所示,本发明所采用的磁悬浮开关磁阻电机5为三相双凸极12/4结构,磁悬浮开关磁阻电机5包括电机绕组53、电机定子52和电机转子54,电机定子固定在电机支撑架51上,电机定子52和电机转子53之间留有0.5mm的径向气隙,电机定子52上叠绕有电机绕组53,辅助轴承4安装在支撑架51内。该电机定子的每个齿极上有单独的绕组,分别独立控制以产生转矩和悬浮力。以a相为例,当a相电感处于上升区时,表示对该相的四个齿进行均衡励磁以产生转矩,此时该相称为转矩相。b相或c相必有一相电感处于最大电感平顶区,表示对该相的四个齿进行不对称励磁以产生悬浮力,此时该相称为悬浮相。在两相同时导通的区间,开通的两相依据各自的控制逻辑和反馈量控制电流,互不影响,实现了转矩与悬浮力在产生机理上的自然解耦。
31.本发明的五自由度磁轴承工作时,能实现飞轮转子的轴向被动悬浮、径向二自由度悬浮、扭转二自由度悬浮。其中,扭转永磁体33产生的静态偏置磁通统一用粗虚线及箭头表示;扭转控制线圈31产生的控制磁通统一用粗实线及箭头表示。具体实现如下:
32.扭转二自由度悬浮的实现:如图2所示,扭转永磁体33产生的偏置磁通从自身的n 极出发,经过扭转定子32的轭部、扭转定子32的定子极、径向气隙、磁轴承转子33、飞轮转轴6、飞轮转子4、轴向气隙,最终回到自身s极。径向控制线圈31所产的控制磁通经过扭转定子32的定子极、径向气隙、磁轴承转子33、扭转定子32的定子极、最终回到扭转定子32的轭部,在三个扭转定子极之间两两形成回路。同样地,以径向平面为基准面在扭转方向上建立a、b、c三个方向的坐标系分别对应三个扭转定子极,某一时刻当飞轮转子在扭转二自由度受到a方向的θa扰动而发生扭转时,扭转控制线圈31 采用三相逆变器驱动通以三相交流电,通过改变扭转控制线圈31的电流大小从而产生扭转控制磁通,与扭转永磁体33产生的偏置磁通进行矢量叠加(粗虚线与粗实线方向相同表示磁通叠加,方向相反表示磁通抵消),实现a方向上的向左侧磁拉力、a负方向上的向右侧磁拉力,即产生的合成磁拉力使得飞轮转子向θa倾斜处的气隙增大、θa负倾斜处的气隙减小,最终实现飞轮转子扭转二自由度的悬浮。同理,b和c方向发生θb、θc扭转的工作原理与上述类似。
33.轴向单自由度被动悬浮的实现:上斥力永磁体35上端面为s极下端面为n极,下斥力永磁体36的上端面为n极下端面为s极,两块永磁体之间轴向间隙为0.5mm。同时,精确设计上斥力永磁体35和下斥力永磁体36(包括磁力和摆放间距等),一方面可抵消飞轮转子4的部分重力,确保磁轴承系统的高安全可靠性;另一方面,配合扭转永磁体 34在轴向气隙上产生的磁吸力,补偿飞轮因加工等因素可能产生的误差重力,进一步确保轴向悬浮稳定。
34.径向二自由度悬浮的实现:如图4所示,该电机定子有12个齿极,电机转子有4个齿极,其中定子每齿极独立各绕一套绕组,12套绕组分别独立控制。当电机转子偏离其几何中心位置时,径向相对的两套绕组导通大小不同的电流,构成不对称励磁,电流较大的一侧气隙磁密更大,便会产生向电流较大齿极一侧的磁拉力,从而可将转轴拉至中心平衡位置。因此,对一相四个齿上的绕组电流进行独立控制,可实现对悬浮力大小及方向的主动控制。
35.根据以上所述,便可以实现本发明。对本领域的技术人员在不背离本发明的精神和保护范围的情况下做出的其他的变化和修改,仍包括在本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。