1.本技术涉及建筑施工技术领域,尤其是涉及一种超大跨度钢屋盖提升用姿态调整结构及调整方法。
背景技术:
2.目前随着国家经济的快速发展和大规模城市化建设,大跨度复杂拱架屋盖是现代公共建设项目中常见的钢结构,常见于公共建设项目中入口桁架屋盖及幕墙钢架,其特点是跨度大,高空拼装作业多,安装精度要求高。
3.相关文件中记载,大型宽体双机位维修机库的跨度一般为140m~160m,进深一般为80m~100m,高度则视屋盖悬挂设备的情况一般为24.5m~29.5m。机库大门一般均面向滑行道或停机坪,附属用房根据人流、物流关系可在机库其他三面环绕布置。双机位机库跨度均超过120m,而且机库屋盖三边支承,一边开敞。
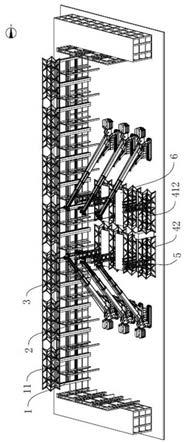
4.现有一种超大跨度的维修机库,跨度405m,进深100m,安装过程中,钢屋盖的三面需要与三侧的围墙的格构柱相互对接,该对接过程一般采用履带吊将钢屋盖吊起一定高度之后,将工作人员提升至相应高度以及相应位置,然后工作人员再对钢屋盖与格构柱进行焊接;但是因为超大跨度的维修机库的钢屋盖自重较大,在高空中容易出现晃动等情况,这样会导致钢屋盖与格构柱焊接不稳定或者焊接精度降低。
技术实现要素:
5.为了使超大跨度的钢屋盖与格构柱焊接精度更高,连接更加稳定,本技术提供一种超大跨度钢屋盖提升用姿态调整结构及调整方法。
6.本技术提供的一种超大跨度钢屋盖提升用姿态调整结构采用如下的技术方案:一种超大跨度钢屋盖提升用姿态调整结构,能够安装在格构柱的上端头,格构柱的上端头上设置有用于安装钢屋盖的安装头,包括两个竖直的支撑腿,两个支撑腿的同一端设置有支撑座,支撑座上设置有提升油缸,提升油缸的提升端设置有用于带动钢屋盖上升或者下降的刚性球,支撑腿上开设有供杆件穿过的避让孔。
7.通过采用上述技术方案,将超大跨度的钢屋盖提升至格构柱顶端的高度之后,使用焊枪等工具将调整结构焊接在格构柱的顶端,此时支撑座位于两个支撑腿的上方,然后找到钢屋盖提升的着力点,将临时支撑杆焊接到刚性球外边面与钢屋盖提升着力点之间;调整过程中,启动提升油缸,提升油缸会通过刚性球以及临时支撑杆带动钢屋盖上升或者下降,这样就可以对钢屋盖的位置进行微调;将钢屋盖调整到合适位置之后,将钢屋盖焊接安装到格构柱的顶端,然后再将调整结构从格构柱上取下(同时会临时支撑杆取下),这样就完成了钢屋盖的安装过程,达到了使超大跨度的钢屋盖与格构柱焊接精度更高,连接更加稳定的效果;格构柱上的安装头用来安装钢屋盖,支撑腿上的避让孔是供安装钢屋盖的固定杆穿过的孔洞,这样可以减少人们高空作业的时长,降低人们高空作业的危险系数。
8.优选的,支撑腿的侧面靠近上端头的位置上开设有贯穿自身的限位槽以及让位
槽,限位槽位于中心位置并且连通支撑腿上端面,让位槽位于限位槽两侧并且连通支撑腿的两侧面,支撑座上开设有供支撑腿穿过的过孔,限位槽内部设置有最大宽度大于限位槽的限位块。
9.通过采用上述技术方案,支撑腿与支撑座通过限位槽以及限位块等结构实现了可拆卸连接,这样不但可以方便对调整结构进行输送,而且将钢屋盖安装完成之后,支撑腿与支撑座可拆卸连接,可以方便工作人员对调整结构进行拆卸;进一步的,因为将钢屋盖焊接固定到格构柱顶端的时候,部分固定杆可能会贯穿支撑腿,因此拆卸调整结构的时候,会将被固定杆贯穿的支撑腿完全切断,支撑腿与支撑座可拆卸连接,可以使人们将多组已经缺少支撑腿的不完整的调整结构拼接到一起,这样可以达到节省材料的效果。
10.优选的,所述限位块整体呈楔形,限位块上设置有限位螺栓,限位螺栓贯穿限位块并且延伸到限位槽的槽底内部与支撑腿螺纹连接。
11.通过采用上述技术方案,支撑腿与支撑座的安装关系如下:支撑腿开设限位槽的一端会插入到支撑座的过孔中,此时支撑腿位于过孔中的部分与过孔的内壁会存在一些空隙,此时将限位块插入到限位槽中,限位块对支撑腿进行挤压,此时会使支撑腿的一端搭接在支撑座的表面上,这样就可以完成支撑腿与支撑座之间的连接,需要拆卸时将限位块从支撑腿上取下即可。
12.优选的,避让孔内部的孔壁内部嵌设有传感器,传感器耦接有控制器,控制器耦接有报警器用于对支撑腿的切割位置进行监测报警。
13.通过采用上述技术方案,钢屋盖安装完成之后,还需要将调整结构取下,连接钢屋盖的支撑杆会穿过支撑腿上的避让孔,此时就需要使用切割机将支撑腿切断,避让孔内部的传感器可以在切割支撑腿的过程中对切割深度进行监控,同时向控制器发出信号,控制器会控制报警器不断发出报警声,通过设置控制元件,可以减小连接钢屋盖与安装头之间连接杆件的损伤,进而保证钢屋盖的使用寿命。
14.优选的,两个支撑腿的两侧设置有加强杆,加强杆呈开口朝向两个支撑腿的u型设置,加强杆与支撑腿之间通过固定螺栓固定连接,加强杆的两端与支撑腿之间焊接。
15.通过采用上述技术方案,支撑腿两侧的加强杆可以提升支撑腿与支撑座之间的连接关系,提升调整结构的强度;加强杆两端与支撑腿之间的焊接结构,人们可以使用敲击锤敲落,然后松开固定螺栓,便可将加强杆从支撑腿上取下,这样就实现了加强杆可拆卸。
16.优选的,调整结构上设置有能够安装在格构柱上用于对调整结构进行运输的运输装置。
17.通过采用上述技术方案,对超大跨度的钢屋盖进行安装的时候,人们可以使用运输装置将已经拼装好的调整结构输送至格构柱的顶端,这样就不需要使用人力对调整结构进行输送,达到了节省人力,提升安全系数的效果。
18.优选的,运输装置包括输送板,输送板的一侧设置有能够卡紧在格构柱上并且带动输送板上下移动的驱动组件,另外一侧设置有能够与加强杆实现卡接的卡接杆。
19.通过采用上述技术方案,使用运输装置对姿态调整结构进行输送时,首先将加强杆卡接到卡接杆上,此时可以完成将姿态调整结构安装到运输装置上的过程;然后再通过驱动组件将卡接有姿态调整结构的输送装置安装到格构柱上,启动驱动组件之后,驱动组件会带动姿态调整机构朝着格构柱的顶端移动。
20.本技术提供的一种超大跨度钢屋盖提升用姿态调整方法采用如下的技术方案:包括以下步骤:s1、准备:将调整结构提升至格构柱的顶端,同时将调整结构焊接安装在格构柱顶端;s2、起吊:对钢屋盖进行提升;s3、连接:计算确定选择钢屋盖着力点,使用临时支撑杆将着力点与刚性球焊接固定;s4、姿态调整:使用提升油缸带动钢屋盖上下移动;s5、焊接固定:将钢屋盖焊接安装在安装头上;s6、去杂料:将临时支撑杆以及调整结构拆除;s7、姿态调整完成,钢屋盖安装完成。
21.优选的,在步骤s1中,需要先将运输装置安装到格构柱上,然后将调整结构安装到运输装置上,运输装置带动调整结构朝着格构柱顶端移动。
22.优选的,在步骤s6去杂料的过程中,需要使用切割机对支撑腿进行切割,切割机临近让位孔时,报警器发出报警,报警器停止报警时,停止切割。
23.综上所述,本技术具有以下技术效果:1.通过设置了调整结构,人们将钢屋盖提升至与格构柱最高点相近的位置之后,将钢屋盖安装到调整结构上,调整结构可以对钢屋盖的高度进行微调,而且可以降低钢屋盖安装时候的晃动幅度,达到了使超大跨度的钢屋盖与格构柱焊接精度更高,连接更加稳定;2.通过设置了传感器、控制器以及报警器,在切割开设有避让孔的支撑腿的时候,传感器能够对切割过程进行监测,报警器会不断发出报警,这样可以使人们方便掌握支撑腿的切割状态,进而降低对连接钢屋盖着力点与安装头的连接杆的损伤,进而延长钢屋盖的使用寿命。
附图说明
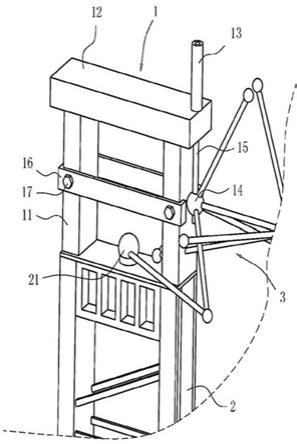
24.图1是本技术实施例中姿态调整结构第一实施例的整体结构图;图2是本技术实施例中姿态调整结构第二实施例的整体结构图;图3是本技术实施例中姿态调整结构第二实施例的局部剖视图;图4是本技术实施例中避让孔中传感器信号传递流程图;图5是本技术实施例中运输装置安装到格构柱上时的整体结构图;图6是本技术实施例中运输装置的爆炸图。
25.图中,1、调整结构;11、支撑腿;111、限位槽;112、让位槽;113、限位块;114、限位螺栓;115、避让孔;12、支撑座;13、提升油缸;14、刚性球;15、提升钢绞线;16、加强杆;17、固定螺栓;2、格构柱;21、安装头;3、钢屋盖;4、运输装置;41、输送板;42、驱动组件;43、卡接杆;431、卡接槽;44、爬行件;441、爬行杆;442、爬行轮;443、橡胶垫;444、同步轮;445、同步带;446、转动电机;447、安装螺栓;5、传感器;6、控制器;7、报警器。
具体实施方式
26.以下结合附图对本技术作进一步详细说明。
27.参照图1,本技术提供了一种超大跨度钢屋盖提升用姿态调整结构,焊接在格构柱2的顶端用于对待安装的钢屋盖3进行临时支撑,并且可以带动钢屋盖3上升或者下降。
28.参照图1,调整结构1包括支撑腿11、支撑座12、提升油缸13以及刚性球14,支撑腿11共设置有两个并且两个支撑腿11相对竖直设置,两个支撑腿11的下端头分别焊接在格构柱2的顶端,支撑座12水平设置在支撑腿11的上端,提升油缸13固定在支撑座12上,提升油缸13的提升钢绞线15自然向下垂落,刚性球14安装在提升油缸13的提升钢绞线15上。超大跨度的钢屋盖3安装时,首先将钢屋盖3提升至靠近格构柱2顶端的位置,然后计算出钢屋盖3靠近格构柱2区域的三个着力点,将三个临时支撑杆的一端分别焊接,使三个临时支撑杆远离钢屋盖3的一端朝着靠近刚性球14的方向延伸,并且焊接固定在刚性球14的外表面上,然后使用提升油缸13通过刚性球14带动钢屋盖3上下移动,对钢屋盖3的姿态进行调整,方便将超大跨度的钢屋盖3焊接安装到格构柱2的顶端。
29.参照图1,支撑腿11与支撑座12之间的连接方式可以采取多种,在其中一个实施例中,支撑腿11的上端头直接焊接在支撑座12的下表面,这样可以保证两者之间的连接关系,即:两者之间的连接关系更加稳定;参照图2和图3,在其他实施例中,支撑腿11与支撑座12之间的连接关系可以为插接,即:在支撑腿11的侧面中心开设一个贯穿自身以及上端面的限位槽111,限位槽111开设在靠近支撑腿11上端头的位置,在限位槽111的两侧分别开设一个让位槽112,让位槽112贯穿支撑腿11自身以及支撑腿11相背离的两个侧面,让位槽112的位置与支撑座12的位置相对应并且自身的高度与支撑座12的厚度相适配,限位槽111内部插接有一个限位块113,限位块113整体呈楔形,限位块113插入到限位槽111内部之后,支撑腿11位于限位槽111两侧的部分会向远离限位块113的方向弯曲,这样支撑座12就会进入到让位槽112内部,进而实现支撑腿11与支撑座12之间的安装;具体的,在限位块113上设置有限位螺栓114,限位螺栓114竖直向下延伸至限位槽111的底部并且与支撑腿11螺纹连接,这样限位螺栓114就可以将限位块113固定安装到限位槽111中,避免因为限位槽111槽壁的挤压力脱离限位槽111。
30.参照图2,为了提升调整结构1整体的稳定性,在支撑腿11的两侧还分别设置有一个u型的加强杆16,加强杆16的开口朝向支撑腿11,加强杆16的两端焊接在支撑腿11的侧面上,在每个加强杆16上还设置有两个固定螺栓17,两个固定螺栓17与两个支撑腿11一一对应,固定螺栓17将加强杆16螺栓安装在支撑腿11上,参照图2,格构柱2的顶端存在一个用于安装钢屋盖3的安装头21,将钢屋盖3安装到格构柱2上时,钢屋盖3会焊接安装到安装头21上,此时连接钢屋盖3以及安装头21的连接杆可能需要穿过支撑腿11,为了减少人们高空作业的时间,在支撑腿11上开设有一个避让孔115。将钢屋盖3安装到安装头21上时,连接杆可以直接从避让孔115中穿过;需要将调整结构1从格构柱2的顶端拆下时,人们只需要将支撑腿11切断即可。
31.参照图4,切割支撑腿11的方式可以采用气割、电切割等多种方式,但是每种方式都可能因为工作人员抖动导致穿过避让孔115的连接杆受损,因此为了降低这种情况发生的可能性,在避让孔115的孔壁内部沿周向嵌设有四个传感器5,传感器5可以是压力传感器
等,传感器5耦接有控制器6,控制器6可以选用plc,人们在切割支撑腿11的时候,随着切割工具不断靠近避让孔115,此时避让孔115内部的传感器5受到的压力会随之改变,并且将压力信号传递给plc,plc还耦接有报警器7,plc对压力信号分析之后,向报警器7发出报警信号,在本实施例中,报警器7可以选用警报灯、警报铃等多种报警结构,报警器7接收到报警信号之后不断报警,切割工具完成切割的瞬间,传感器5会瞬间失去压力,报警器7停止报警,工作人员瞬间停止切割,这样就可以降低对支撑杆的损伤。
32.参照图5,调整结构1应用环境为格构柱2的顶端,因此需要使用调整结构1对钢屋盖3的姿态进行调整之前,将调整结构1安装到格构柱2的顶端,为了方便将调整结构1安装到格构柱2的顶端,在格构柱2上设置有运输装置4。
33.参照图5,运输装置4包括输送板41、驱动组件42以及卡接杆43,输送板41竖直设置在格构柱2的一侧,卡接杆43共设置有两个,两个卡接杆43水平设置在输送板41远离格构柱2的一侧,两个卡接杆43在同一水平面上相互平行设置并且两个卡接杆43靠近输送板41的一端固定在输送板41的侧面上,两个卡接杆43的上表面开设有供加强杆16进入的卡接槽431,卡接槽431呈缩口状,驱动组件42设置在输送板41靠近格构柱2的一侧,驱动组件42可以将输送板41限位在格构柱2上并且可以带动输送板41沿竖直方向在格构柱2上往复移动。
34.需要使用运输装置4将调整结构1输送至格构柱2顶端的时候,首先通过驱动组件42将输送板41安装到格构柱2上,然后将调整机构竖直摆放,同时将加强杆16卡入到卡接杆43的卡接槽431中,之后启动驱动组件42,驱动组件42带动输送板41以及调整结构1朝着格构柱2的顶端移动,最终完成调整结构1的输送。
35.参照图6,驱动组件42包括沿水平方向相对设置的两组爬行件44,爬行件44包括由上到下依次设置的两个爬行杆441,爬行杆441靠近另外一组爬行件44的一侧设置有爬行轮442,爬行轮442的外侧设置有一圈橡胶垫443;爬行轮442远离爬行杆441的一侧设置有与爬行轮442同轴的同步轮444,两个同步轮444之间设置有同步带445;其中一个爬行杆441远离爬行轮442的一侧固定连接有带动爬行轮442转动的转动电机446。驱动组件42通过爬行轮442与输送板41之间的距离比较小,进而可以夹紧在格构柱2上,爬行轮442外侧的橡胶垫443可以提升输送板41在格构柱2上安装的稳定性;需要通过驱动组件42带动输送板41上下移动时,启动转动电机446,转动电机446带动爬行轮442以及同步轮444一起转动,同步轮444与同步带445可以使上下两个爬行杆441上的两个爬行轮442保持同步,这样还可以提升驱动组件42的爬升能力。
36.参照图6,为了方便人们使输送装置与格构柱2分离,将爬行杆441与输送板41设置为可拆卸连接,其具体为:爬行杆441靠近输送板41的一端插入到输送板41内部,输送板41上开设有供爬行杆441插入的连接孔,输送板41的侧面上设置有安装螺栓447,安装螺栓447朝着靠近输送板41内部的方向延伸,延伸到连接孔内部之后插入到爬行杆441内部,这样就实现了爬行杆441与输送板41的可拆卸连接,需要将输送装置从格构柱2上拆下时,松开安装螺栓447之后,便可将爬行杆441从输送板41上取下。
37.本技术还提供了一种超大跨度钢屋盖提升用姿态调整方法,包括以下步骤:s1、准备:s11、将爬行杆441插入到输送板41中,拧紧安装螺栓447,实现爬行杆441的固定,同时实现将输送板41安装到格构柱2上;
s12、将调整结构1安装到卡接杆43上,此时加强杆16恰好进入到卡接槽431中;s13、启动转动电机446,转动电机446带动爬行轮442以及同步轮444一起转动,将调整结构1提升至格构柱2的顶端;s14、将支撑腿11的下端头焊接安装在格构柱2顶端;s2、起吊:对钢屋盖3进行提升;s3、连接:计算确定选择钢屋盖3着力点,使用临时支撑杆将着力点与刚性球14焊接固定;s4、姿态调整:使用提升油缸13带动钢屋盖3上下移动;s5、焊接固定:将钢屋盖3焊接安装在安装头21上;s6、去杂料:需要使用切割机对支撑腿11进行切割,切割机临近让位孔时,报警器发出报警,报警器停止报警时,停止切割;s7、姿态调整完成,钢屋盖3安装完成。
38.本具体实施例仅仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。