1.本技术涉及清洁领域,尤其涉及清洁装置与手柄。
背景技术:
2.随着信息技术的飞速发展,人们的生活水平不断得到提高。清洁装置越来越受欢迎,越来越多的用户采用清洁装置来清洁家庭环境。清洁装置的样式多种多样,其中有一种手持式清洁装置,在使用时需要用户手握住该清洁装置的手柄,以前后左右移动清洁装置,以达到控制该清洁装置移动的目的。
3.为了丰富清洁装置的功能,清洁装置的上的各种部件不断增加,这无疑会导致清洁装置的重量增加,然而现有的手持式清洁装置均是单手握持式的,握持方式过于单一,这无疑会增加用户的使用负担,使得用户难以握持。因此,如何对清洁装置的手柄进行改进以便于用户握持,成为当前亟需解决的技术问题。
技术实现要素:
4.本技术提供一种清洁装置,以解决现有的手持式清洁装置难以握持的问题。同时,本技术还提供一种安装在手动操控的移动器械上的手柄。
5.本技术提供一种清洁装置,包括:清洁机身、手柄;
6.所述手柄包括:手柄本体,安装在所述手柄本体上的把手,锁元件;
7.所述清洁机身与所述手柄连接;
8.所述把手具有如下两种状态:便于手柄本体被单手握持的闭合状态、便于把手被双手握持的张开状态;
9.所述锁元件具有锁定位置和解锁位置,当所述锁元件位于解锁位置时,所述把手能够在闭合状态和张开状态之间切换;当所述锁元件位于锁定位置时,所述把手锁定在当前状态。
10.可选的,所述锁元件包括轴向部件,所述轴向部件安装在所述手柄本体上并能被操作而处于解锁位置和锁定位置。
11.可选的,所述手柄本体上设置有安装位;所述把手设置有安装孔;
12.所述轴向部件穿过所述安装孔,实现与所述把手的套接,并进一步伸入所述安装位,从而实现将所述把手安装在所述手柄本体上。
13.可选的,所述轴向部件包括第一部与第二部;
14.其中,当所述轴向部件与所述把手的安装孔套接的位置位于所述第一部时,所述轴向部件锁定所述把手,所述把手无法旋转;当所述轴向部件与所述把手的安装孔套接的位置位于所述第二部时,所述轴向部件解锁所述把手,所述把手能够以所述轴向部件为轴进行旋转。
15.可选的,所述安装孔的至少部分内周面采用非圆周面;所述轴向部件的第一部的外周面的形状与尺寸与所述安装孔的所述至少部分内周面的形状与尺寸相匹配;所述轴向
部件的第二部的外周面为圆周面,其尺寸使其能内接于所述安装孔的内周面。
16.可选的,所述安装孔的所述至少部分内周面为边数为偶数的正多边形;对应地,所述轴向部件的第一部的外周面的形状采用同样的正多边形并具有与所述安装孔的所述至少部分内周面相配合的尺寸;所述把手与所述锁元件在闭合状态和张开状态之间有具有如下数量的能够实现锁定的位置状态数:所述边数除以2。
17.可选的,所述把手包括第一把手与第二把手;
18.所述第一把手与所述第二把手在所述把手处于闭合状态时在竖直方向上延伸,在所述把手处于张开状态时在水平方向上延伸。
19.可选的,所述第一把手与所述第二把手上设置有磁吸装置,所述磁吸装置用于提供使所述第一把手与所述第二把手相互贴合的作用力。
20.可选的,所述第一把手与所述第二把手之间设置有弹簧装置,所述弹簧装置用于提供使所述第一把手与所述第二把手相互分开的作用力。
21.可选的,所述锁元件上设置有安装槽位,所述把手通过与所述安装槽位对接,实现与所述手柄本体的连接;
22.所述手柄本体上设置有安装位;所述把手包括轴向部件;
23.所述轴向部件穿过所述安装槽位,并进一步伸入所述安装位,从而实现将所述把手安装在所述手柄本体上。
24.本技术提供一种安装在手动操控的移动器械上的手柄,包括:手柄本体,安装在所述手柄本体上的把手,锁元件;
25.所述把手具有如下两种状态:便于手柄本体被单手握持的闭合状态、便于把手被双手握持的张开状态;
26.所述锁元件具有锁定位置和解锁位置,当所述锁元件位于解锁位置时,所述把手能够在闭合状态和张开状态之间切换;当所述锁元件位于锁定位置时,所述把手锁定在当前状态。
27.本技术提供一种清洁装置,包括:清洁机身、手柄;
28.所述手柄包括:手柄本体,安装在所述手柄本体上的把手,锁元件;
29.所述清洁机身与所述手柄连接;
30.所述把手具有如下两种状态:便于单手握持的第一状态、便于双手握持的第二状态;
31.所述锁元件具有锁定位置和解锁位置,当所述锁元件位于解锁位置时,所述把手能够在第一状态和第二状态之间切换;当所述锁元件位于锁定位置时,所述把手锁定在当前状态。
32.本技术提供一种清洁装置,包括:清洁机身、手柄;
33.所述手柄包括:手柄本体,安装在所述手柄本体上的把手,锁元件;
34.所述清洁机身与所述手柄连接;
35.所述把手具有如下两种状态:便于握持把手第一位置的第一状态、便于握持把手第二位置的第二状态;
36.所述锁元件具有锁定位置和解锁位置,当所述锁元件位于解锁位置时,所述把手能够在第一状态和第二状态之间切换;当所述锁元件位于锁定位置时,所述把手锁定在当
前状态。
37.可选的,所述把手在第一状态时的形态不同于所述把手在第二状态时的形态。
38.与现有技术相比,本技术具有以下优点:
39.本技术提供一种清洁装置,包括:清洁机身、手柄;所述手柄包括:手柄本体,安装在所述手柄本体上的把手,锁元件;所述清洁机身与所述手柄连接;所述把手具有如下两种状态:便于手柄本体被单手握持的闭合状态、便于把手被双手握持的张开状态;所述锁元件具有锁定位置和解锁位置,当所述锁元件位于解锁位置时,所述把手能够在闭合状态和张开状态之间切换;当所述锁元件位于锁定位置时,所述把手锁定在当前状态。由于该手柄本体上的把手与锁元件相互配合,当锁元件位于锁定位置时,能够将把手锁定在当前的状态,当锁元件位于解锁位置时,把手能够在闭合状态和张开状态之间旋转,进而旋转至闭合状态或者张开状态,便于清洁装置被单手握持或者被双手握持,从而便于用户对手持式清洁装置进行握持。
附图说明
40.图1为第一实施例的手柄上的把手处于便于手柄本体被单手握持状态下的结构示意图;
41.图2为第一实施例的手柄上的把手处于可被双手握持状态下的结构示意图;
42.图3为第一实施例的锁元件的结构示意图;
43.图4为第一实施例的锁元件锁定把手的结构示意图;
44.图5为第一实施例的锁元件解锁把手的结构示意图;
45.图6为第一实施例的第一部的外周面的形状为正八边形时的手柄的第一结构示意图;
46.图7为第一实施例的第一部的外周面的形状为正八边形时的手柄的第二结构示意图;
47.图8为第一实施例的第一部的外周面的形状为正八边形时的手柄的第三结构示意图;
48.图9为第一实施例的第一部的外周面的形状为正八边形时的手柄的第四结构示意图;
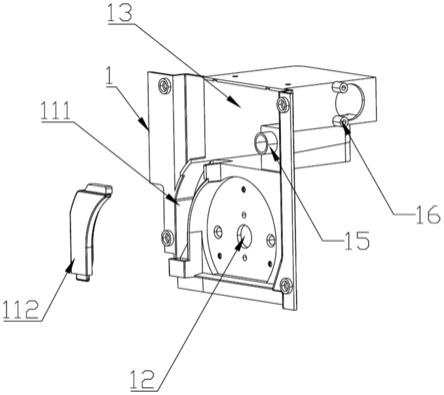
49.图10为第二实施例提供的清洁装置的结构示意图。
具体实施方式
50.在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似推广,因此本技术不受下面公开的具体实施的限制。
51.本技术提供安装有手柄的清洁装置与安装在手动操控的移动器械上的手柄,以下采用具体的实施例对本技术的清洁装置与手柄的结构与工作原理进行描述。需要说明的是,以下所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。为了便于理解本技术的清洁装置,先对安装在清洁装置上的手柄
的结构进行详细介绍。
52.第一实施例
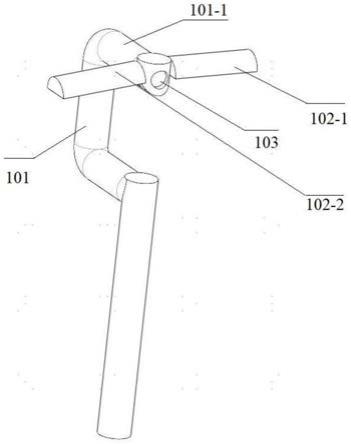
53.本技术第一实施例提供一种安装在手动操控的移动器械上的手柄,在本实施例中,该手柄能够被单手握持,也能够被双手握持。如图1与图2所示,其分别为本技术第一实施例的手柄上的把手分别在不同状态下的结构示意图。图1为手柄上的把手处于便于手柄本体被单手握持状态下的结构示意图,图2为手柄上的把手处于可被双手握持状态下的结构示意图。为了便于观察手柄的内部结构,本技术提供了图3至图5,图3至图5能够示意出手柄上的各部件的拆解结构示意图。以下对本实施例的手柄的结构以及工作原理进行详细阐述。
54.请参照图1至图5,本实施例的手柄包括手柄本体101、安装在手柄本体上的把手102、锁元件103。其中,把手102具有如下两种状态:便于手柄本体101被单手握持的闭合状态、便于把手102被双手握持的张开状态。具体地,在本实施例中,需要说明的是,在把手102处于便于手柄本体101被单手握持的闭合状态时,用户可以单手握持手柄前端,在把手102处于可被双手握持的张开状态时,用户可以双手握持把手102的第一把手102-1与第二把手102-2。
55.具体地,把手102包括第一把手102-1与第二把手102-2(图1未同时示出第一把手102-1与第二把手102-2,图2已同时示出第一把手102-1与第二把手102-2)。请参照图1,图1示意的为手柄上的把手102处于便于手柄本体101被单手握持的状态,此时通过图1可以看出,第一把手102-1与第二把手102-2处于贴合的状态。请参照图2,图2示意的为手柄上的把手102处于可被双手握持的状态,此时通过图2可以看出,第一把手102-1与第二把手102-2处于张开的状态。当第一把手102-1与第二把手102-2处于张开的状态时,第一把手102-1与第二把手102-2关于锁元件103对称。
56.当然,可以理解的是,图1展示的把手102处于便于手柄本体101被单手握持的状态与图2展示的把手102处于可被双手握持的状态均为一种示例,并不表示仅在处于图1所示的状态手柄本体101才能够被单手握持,或者,也并不表示仅在处于图2所示的状态把手102才能够被双手握持。例如,在第一把手102-1与第二把手102-2之间的夹角为某一角度时,只要锁元件103能够将把手102的两个把手第一把手102-1与第二把手102-2进行锁定,使得把手102的两个把手第一把手102-1与第二把手102-2不能旋转,此时,锁元件103可以将第一把手102-1与第二把手102-2锁定在当前状态。这种第一把手102-1与第二把手102-2存在一定角度的夹角,并且第一把手102-1与第二把手102-2不能旋转的状态下,实际上也可以作为伸展把手102可被双手握持状态的一种示例。
57.在本实施例中,把手102具有便于手柄本体101被单手握持的闭合状态、便于把手102被双手握持的张开状态,并且能够在闭合状态与张开状态之间转换,与锁元件103的结构与工作原理有关。具体地,锁元件103具有锁定位置和解锁位置,当锁元件103位于解锁位置时,把手102能够在闭合状态和张开状态之间切换;当锁元件103位于锁定位置时,把手102锁定在当前状态。具体地,在锁元件103位于解锁位置时,可以将把手102以转动的方式转动到合适的位置或者角度,再使锁元件103位于锁定位置,这样就实现了把手102在被双手握持和便于手柄本体101被单手握持两种状态之间的转换。
58.例如,当用户需要对安装有本实施例的手柄的手动操控的移动器械进行使用时,
以手持式清洁装置作为手动操控的移动器械为例,用户可以单手握持该手持式清洁装置,也可以双手握持该手持式清洁装置,并且手持式清洁装置可以在单手握持状态与双手握持状态之间进行转换。
59.例如,当手持式清洁装置上的手柄上的把手102位于图1所示的状态时,通过使锁元件103位于锁定位置,用户可以单手握持手柄。若使锁元件103位于解锁位置,可以旋转把手102的第一把手102-1与第二把手102-2,当将第一把手102-1与第二把手102-2旋转至合适的角度或者位置时,可以将锁元件103设置为锁定位置,进而将第一把手102-1与第二把手102-2锁定在当前状态,例如,可以是将第一把手102-1与第二把手102-2锁定在图2所示的状态,此时,用户可以双手握持手柄,上述过程实现了手持式清洁装置在单手握持状态到双手握持状态之间的转换。
60.类似于上述过程,还可以将手持式清洁装置从双手握持状态转换至单手握持状态,例如,当手持式清洁装置上的手柄上的把手位于图2所示的状态时,通过将锁元件103设置为锁定位置,用户可以双手握持手柄。若使锁元件103位于解锁位置,可以旋转把手102的第一把手102-1与第二把手102-2,当将第一把手102-1与第二把手102-2旋转至合适的角度或者位置时,可以将锁元件103设置为锁定位置,进而将第一把手102-1与第二把手102-2锁定在当前状态,例如,可以是将第一把手102-1与第二把手102-2锁定在图1所示的状态,此时,用户可以单手握持手柄,上述过程实现了手持式清洁装置在双手握持状态到单手握持状态之间的转换。
61.需要说明的是,之所以当锁元件103位于解锁位置时,把手102能够在闭合状态和张开状态之间切换,当锁元件103位于锁定位置时,把手102锁定在当前状态,与锁元件103的结构有关,以下对锁元件103的结构进行详细阐述。
62.具体地,锁元件103可以采用轴向部件实现。请参照图3,其为本技术第一实施例的锁元件的结构示意图。
63.该轴向部件安装在手柄本体101上,并能够通过用户操作而处于解锁位置和锁定位置;把手102通过与轴向部件套接,实现与手柄本体101的连接。即:在本实施例中,把手102通过套接在轴向部件上的方式,通过轴向部件安装在手柄本体101上。为了便于推拉轴向部件,该轴向部件上设置有推拉部件103-3,通过推拉轴向部件上的推拉部件103-3,能够使轴向部件分别处于解锁位置、锁定位置。具体地,推拉部件103-3可以为推拉按钮,当然,推拉部件103-3还可以是除了推拉按钮之外的便于用户进行推拉操作的其他形式的部件。
64.本实施例中,锁元件103,即轴向部件,在沿着手柄本体101的握持部101-1(图2所示)的延伸方向上运动,所述手柄本体101的握持部101-1为用户使用清洁装置进行清洁作业时被用户单手握持的部位,当推拉部件103-3被按压时,轴向部件在手柄本体101的握持部101-1的延伸方向上向前(清洁装置前进方向)运动,当推拉部件103-3被拉出或推出时,轴向部件在手柄本体101的握持部101-1的延伸方向上向后(清洁装置后退方向)运动。轴向部件的运动方向与第一把手102-1和第二把手102-2的旋转平面不共面。在另一实施例中,锁元件103,即轴向部件可在水平方向上前后运动,当推拉部件103-3被按压时,轴向部件在水平方向上向前(清洁装置前进方向)运动,当推拉部件103-3被拉出或推出时,轴向部件在水平方向上向后(清洁装置后退方向)运动。此时,轴向部件的运动方向垂直于第一把手102-1和第二把手102-2的旋转平面。
65.在本实施例中,为了清晰地示意如何将轴向部件与把手102共同安装在手柄本体101上,并实现把手102在闭合状态与张开状态之间转换的过程,以下结合图1、图4与图5进行详细阐释。图4为本技术第一实施例的锁元件103锁定把手102的结构示意图,图5为本技术第一实施例的锁元件103解锁把手102的结构示意图。
66.具体地,手柄本体101上设置有安装位(图中未示出)。把手102上设置有安装孔102-3。轴向部件通过穿过安装孔102-3,实现与所述把手102的套接,并进一步伸入安装位,从而实现将所述把手102安装在手柄本体101上。在本实施例中,手柄本体101上设置的安装位可以是指容纳把手102的安装孔的结合部位的相关部分,以及轴向部件的孔。
67.为了便于利用轴向部件锁定或者解锁把手102,可以将轴向部件设计成包含第一部103-1与第二部103-2的如图3所示意的结构。之所以将轴向部件设计成包含第一部103-1与第二部103-2的结构,主要原因在于当轴向部件与安装孔102-3套接的位置位于第一部103-1时,轴向部件能够锁定把手102,即:第一把手102-1与第二把手102-2处于锁定状态,相互之间不能自由旋转。当轴向部件与安装孔102-3套接的位置位于第二部103-2时,轴向部件解锁把手102,把手102能够以轴向部件为轴进行旋转,即:第一把手102-1与第二把手102-2处于解锁状态,能够以轴向部件为轴进行自由旋转。在本实施例中,具体地,当推拉部件103-3被按压时,轴向部件与安装孔102-3套接的位置位于第二部103-2处,轴向部件解锁把手102;当推拉部件103-3被复原时(从按压状态抽拉出来),轴向部件与安装孔102-3套接的位置位于第一部103-1处,轴向部件锁定把手102。
68.在本实施例中,在推拉轴向部件时,为了便于判断推拉到何种程度,锁元件103由初始的锁定位置变为解锁位置,可以通过推拉过程中轴向部件的运动行程来判断。具体地,当轴向部件的运动行程达到第一部103-1在轴向部件轴向方向上的长度,或者达到第一把手102-1、第二把手102-2在轴向部件轴向方向上的旋转接头的尺寸之和时,则锁元件103由锁定位置变为解锁位置。
69.在推拉轴向部件时,为了将锁元件103由解锁位置恢复至初始的锁定位置,在手柄上还安装有机械复位结构或者电动复位结构。具体地,当锁元件103处于解锁位置时,并将把手102的第一把手102-1、第二把手102-2旋转到位后,通过触发上述机械复位结构或者电动复位结构,以触发锁元件103回复到初始的锁定位置。上述机械复位结构或者电动复位结构能够触发锁元件103复位。
70.可以理解的是,在本实施例中,还可以是当推拉部件103-3被抽拉出来时,轴向部件与安装孔102-3套接的位置位于第二部103-2处,轴向部件解锁把手102;当推拉部件103-3被复原时(从抽拉状态按压回去),轴向部件与安装孔102-3套接的位置位于第一部103-1处,轴向部件锁定把手102,在该情形中,第一部103-1与第二部103-2的相互位置关系与图3所示的结构相反,即:在该情形中,第一部103-1与推拉部件103-3直接相连接,同时第一部103-1与第二部103-2相连接。即,在该结构中,第一部与第二部的位置相较于图3中的第一部与第二部的位置进行了调换。
71.更具体地,为了使得当轴向部件与安装孔102-3套接的位置位于第一部103-1时,轴向部件锁定把手102;同时,当轴向部件与安装孔102-3套接的位置位于第二部103-2时,轴向部件解锁把手102,在本实施例中,可以将安装孔102-3的内周面设置成非圆周面;与之对应地,将第一部103-1的外周面设置成与安装孔102-3的内周面的形状与尺寸相匹配的形
状与尺寸,并具有非圆形的形状,使得当轴向部件与安装孔102-3套接的位置位于第一部103-1时,轴向部件锁定把手102。当然,上述非圆形的形状仅仅是一种理论上可能性,实际上,由于需要使把手在闭合状态和张开状态均能被锁定,则所述形状选择至少要满足在上述两个状态均能够实现第一部103-1的外周面与安装孔102-3的内周面恰好配合。一种比较明显的选择方案是,所述安装孔的内周面为边数为偶数的正多边形;对应地,所述轴向部件的第一部103-1的外周面的形状采用同样的正多边形并具有与所述安装孔的内周面相配合的尺寸;所述把手与所述锁元件在闭合状态和张开状态之间具有如下数量的能够实现锁定的位置状态数:所述边数除以2。
72.具体地,请参见图4,图4示意出了第一部103-1的外周面的形状与尺寸与安装孔102-3的内周面的形状与尺寸相匹配的一种示例,通过图4可以看出:安装孔102-3的内周面的形状为正方形,第一部103-1的外周面的形状也为正方形,并且二者的尺寸恰好能够使得第一部103-1与安装孔102-3能够相互配合实现套接,此时,轴向部件锁定把手102。
73.与此同时,可以将第二部103-2的外周面的形状设置为如图5中示意的圆周面,在将第二部103-2的外周面的形状设置为圆周面时,该圆周面的尺寸需要能够内接于安装孔102-3的内周面,进而使得当轴向部件与安装孔102-3套接的位置位于第二部103-2时,轴向部件解锁把手102。
74.在本实施例中,当将安装孔102-3的内周面设置成为正方形时;对应地,将第一部103-1的外周面的形状也设置为正方形。把手102与锁元件103在闭合状态和张开状态之间(包括闭合状态与张开状态)有两个状态能够实现锁定。这两个状态分别是如图1所示的闭合状态与如图2所示的张开状态。
75.在本实施例中,除了将安装孔102-3的内周面与第一部103-1的外周面设置为尺寸相匹配的正方形。还可以将安装孔102-3的内周面与第一部103-1的外周面设置为尺寸相匹配的其他正多边形。当然,其他正多边形的边数应当为偶数。例如,可以将安装孔102-3的内周面与第一部103-1的外周面设置为尺寸相匹配的正八边形或者正十六边形。
76.在本实施例中,当将安装孔102-3的内周面设置成为正八边形时;对应地,将第一部103-1的外周面的形状也设置为正八边形。把手102与锁元件103在闭合状态和张开状态之间(包括闭合状态与张开状态)有四个状态能够实现锁定。其中,在四个状态中,有三个状态可以是把手102被张开锁定的状态,这三个状态两个把手(第一把手与第二把手)之间的夹角分别为:90度、180度以及270度。
77.具体地,请参见图6至图9,其分别为第一实施例的第一部的外周面的形状为正八边形时的手柄的第一结构示意图至第四结构示意图。具体地,图6展示的是第一把手与第二把手之间的夹角为90度时的手柄的第一立体示意图,图7展示的是第一把手与第二把手之间的夹角为90度时的手柄的第二立体示意图。从图6与图7可以看出:当第一把手102-1与第二把手102-2之间的夹角为90度时,可以使用锁元件103将第一把手102-1与第二把手102-2锁定在该特定的位置。
78.图8展示的是第一把手与第二把手之间的夹角为90度时的手柄的平面示意图,图9展示的是第一把手与第二把手之间的夹角为180度时的手柄的平面示意图。从图9可以看出:当第一把手102-1与第二把手102-2之间的夹角为180度时,可以使用锁元件103将第一把手102-1与第二把手102-2锁定在该特定的位置。
79.在本实施例中,当将安装孔102-3的内周面设置成为正十六边形时;对应地,将第一部103-1的外周面的形状也设置为正十六边形。把手102与锁元件103在闭合状态和张开状态之间(包括闭合状态与张开状态)有八个状态能够实现锁定。其中,在八个状态中,有七个状态可以是把手102被张开锁定的状态,这七个状态两个把手(第一把手与第二把手)之间的夹角分别为:45度、90度、135度、180度、225度、270度以及315度。
80.同时,在该手柄特定的位置上,例如推拉部件103-3的外端面上增加导向提醒机构103-4,具体可以参见图8与图9,导向提醒机构103-4用于提示用户当把手102的第一把手102-1与第二把手102-2转动到该特定的位置时,可以将第一把手102-1与第二把手102-2通过锁元件103进行锁定。上述特定的位置对应恰好能够锁定第一把手102-1与第二把手102-2的角度。具体地,上述导向提醒机构103-4可以是推拉部件103-3的外端面上的与第一把手102-1和第二把手102-2的多个转动角度一一对应的多个标记,当第一把手102-1和第二把手102-2转动到与标记对齐时,用户可以选择将把手锁定在与该标记对应的角度。更具体地,推拉部件103-3的外端面上的标记与第一部103-1的外周面上可用于锁定第一把手102-1与第二把手102-2的角度一一对应。
81.在本实施例中,为了便于用户感知转动把手102的第一把手102-1与第二把手102-2转动到哪个角度时,能够将第一把手102-1与第二把手102-2进行锁定,具体地,可以在该手柄内部设置齿轮,该齿轮与把手102的第一把手102-1、并与第二把手102-2相互啮合,以助于锁元件103位于解锁位置时,第一把手102-1与第二把手102-2进行同步同角度地转动。
82.在本实施例中,第一把手102-1与第二把手102-2在把手102处于闭合状态时可以在竖直方向上延伸,第一把手102-1与第二把手102-2贴合在一起,例如:如图1所示的闭合状态;第一把手102-1与第二把手102-2在把手102处于张开状态时可以在水平方向上延伸,例如:如图2所示的张开状态;当然,当将安装孔102-3的内周面与第一部103-1的外周面的形状对应设置成正偶数(该偶数大于等于六)边形时,第一把手102-1与第二把手102-2可锁定在多个张开角度。
83.上述阐述的锁元件103解锁与锁定把手102的过程,是以在锁元件103上设置轴向部件,在把手102上设置用于轴向部件穿过的安装孔为例介绍的。可以理解的是,还可以在把手102上设置轴向部件,在锁元件103上设置用于轴向部件穿过的安装槽位以完成锁元件103解锁与锁定把手102的过程。把手102上的轴向部件通过与安装槽位对接,实现将把手102安装在手柄本体101上。具体地,手柄本体101上设置有安装位,轴向部件穿过安装槽位,并进一步伸入安装位,从而实现将把手102安装在手柄本体101上。
84.只要保证锁元件103能够解锁与锁定把手102,把手102具有闭合状态、展开状态以及能够在闭合状态与展开状态之间转换即可。
85.在本实施例中,如图5所示,可以在第一把手102-1与第二把手102-2上设置有磁吸装置102-4。磁吸装置102-4用于当锁元件103位于解锁位置时,提供使第一把手102-1与第二把手102-2相互贴合的作用力,使得第一把手102-1与第二把手102-2贴合在一起,以使把手102处于闭合状态。例如,当第一把手102-1与第二把手102-2处于如图2所示的张开状态时,如果想使把手102处于如图1所示的闭合状态,则可以在锁元件103位于解锁位置时,使第一把手102-1与第二把手102-2贴合在一起,所述磁吸装置102-4使得把手102维持于闭合状态。这样就避免了用户在单手操作手柄本体101时,需要手动将第一把手102-1与第二把
手102-2贴合在一起的多余动作。
86.在本实施例中,还可以在第一把手102-1与第二把手102-2之间设置弹簧装置。弹簧装置用于当锁元件103位于解锁位置时,提供使第一把手102-1与第二把手102-1相互分开的作用力,以使把手102处于张开状态。例如,当第一把手102-1与第二把手102-2处于如图1所示的闭合状态时,如果想使把手102处于如图2所示的张开状态,则可以在第一把手102-1与第二把手102-2之间设置弹簧装置,具体可以采用设置在第一把手102-1与第二把手102-2结合部的扭簧,将扭簧设置在所述第一把手102-1与第二把手102-2之间,以使得当锁元件103位于解锁位置时,第一把手102-1与第二把手102-2能够被扭簧弹开,使得把手102处于张开状态。这样就避免了用户手动将第一把手102-1与第二把手102-2分开的操作;当然,所述弹簧装置应当设置为具有足够的柔性,使第一把手102-1与第二把手102-2可以在外力作用下能够恢复到闭合状态。
87.在本实施例中,手柄本体101上设置的安装位可以是指容纳把手102的安装孔的结合部位的相关部分,以及轴向部件的孔,在该孔中,设置有安置所述轴向部件的第一部103-1的结构,在推拉部件103-3被按压时,该结构的空间用于容纳所述轴向部件的第一部103-1。
88.在本实施例中,由于该手柄本体上的把手与锁元件相互配合,当锁元件位于锁定位置时,能够将把手锁定在当前的状态,当锁元件位于解锁位置时,把手能够在闭合状态和张开状态之间切换,进而旋转至闭合状态或者张开状态;因此,使用者可以在锁元件位于解锁位置时,将所述把手置位到闭合状态或者张开状态,并在置位到位后,将锁元件移动到锁定位置,从而使把手维持在所述闭合状态或者张开状态,以便于用户根据需要的方式,对手持式清洁装置进行握持。
89.第二实施例
90.本实施例提供一种安装有手柄的清洁装置,请参照图10,其为本技术第二实施例提供的清洁装置的结构示意图。
91.在本实施例中,该清洁装置上设置的可变形手柄为第一实施例提供的手柄。该清洁装置包括:清洁机身100与手柄;手柄包括:手柄本体101,安装在手柄本体101上的把手102,锁元件103。
92.在本实施例中,清洁机身100与手柄连接;把手102具有如下两种状态:便于手柄本体被单手握持的闭合状态、便于把手被双手握持的张开状态。
93.锁元件103具有锁定位置和解锁位置,当锁元件103位于解锁位置时,把手102能够在闭合状态和张开状态之间切换;当锁元件103位于锁定位置时,把手102锁定在当前状态。
94.第三实施例
95.本实施例提供一种清洁装置,包括:清洁机身、手柄,清洁机身与手柄连接。
96.手柄具体包括:手柄本体,安装在手柄本体上的把手与锁元件。
97.把手具有如下两种状态:便于单手握持的第一状态、便于双手握持的第二状态。
98.锁元件具有锁定位置和解锁位置,当锁元件位于解锁位置时,把手能够在第一状态和第二状态之间切换;当锁元件位于锁定位置时,把手锁定在当前状态。
99.在本实施例中,作为把手处于便于单手握持的第一状态的一种示例,可以是如第二实施例中的把手的两个子把手处于闭合状态,或者把手的两个子把手处于贴合状态。作
为把手处于便于双手握持的第二状态的一种示例,可以是如第二实施例中的把手的两个子把手处于张开状态。当然第一状态或者第二状态还可以是除了上述列举状态,此处对第一状态与第二状态不进行限制,只要第一状态便于单手握持,第二状态便于双手握持即可。关于该实施例中的其他部件或者结构不再详细阐释,详细参加第一实施例与第二实施例。
100.第四实施例
101.本实施例提供一种清洁装置,包括:清洁机身、手柄;清洁机身与手柄连接。
102.手柄包括:手柄本体,安装在手柄本体上的把手,锁元件。
103.把手具有如下两种状态:便于握持把手第一位置的第一状态、便于握持把手第二位置的第二状态;
104.锁元件具有锁定位置和解锁位置,当锁元件位于解锁位置时,把手能够在第一状态和第二状态之间切换;当锁元件位于锁定位置时,把手锁定在当前状态。
105.在本实施例中,把手在第一状态时的形态不同于把手在第二状态时的形态。
106.在本实施例中,作为便于握持把手第一位置的第一状态的一种示例,可以是指便于单手握持的第一状态,当然也可以是以其他方式握持把手第一位置的第一状态;作为便于握持把手第二位置的第二状态的一种示例,可以是指便于双手握持的第二状态,当然也可以是以其他方式握持把手第二位置的第二状态。关于该实施例中的其他部件或者结构不再详细阐释,详细参加第一实施例与第二实施例。
107.应用场景1
108.用户使用清洁装置清洁地面时,当前单手握持该清洁装置的手柄;若在清洁过程中遇到障碍物,需要使用较大力时,按压锁元件,使得锁元件处于解锁位置,将手柄上的把手打开至张开状态,然后复原锁元件,使得锁元件处于锁定位置。用户即可双手握持把手进行清洁过程。
109.应用场景2
110.用户使用清洁装置清洁地面时,当前采用双手握持该清洁装置的手柄进行清洁,当清洁完毕时,需要将把手闭合,按压锁元件,使得锁元件处于解锁位置,将手柄上的把手旋转至闭合状态,然后复原锁元件,使得锁元件处于锁定位置。即可收纳该清洁装置。
111.应用场景3
112.用户使用清洁装置清洁地面时,当前双手握持该清洁装置的手柄进行清洁,当清洁空间突然变得狭小时,需要将把手部分收起,按压锁元件,使得锁元件处于解锁位置,将手柄上的把手旋转至合适角度,然后复原锁元件,使得锁元件处于锁定位置。即可将把手在部分程度上收起。
113.本技术虽然以较佳实施例公开如上,但其并不是用来限定本技术,任何本领域技术人员在不脱离本技术的精神和范围内,都可以做出可能的变动和修改,因此本技术的保护范围应当以本技术权利要求所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。