技术特征:
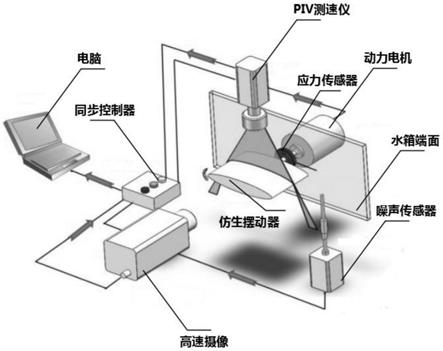
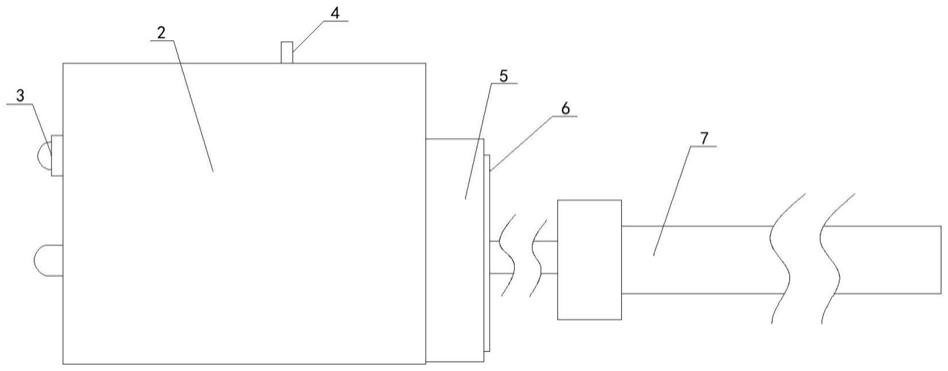
1.一种仿生潜航器摆动推进性能一体化测试平台,其特征在于包括仿生鱼摆动器、动力驱动系统、高速成像系统、piv测速仪、数据测量系统、信息处理系统、信息控制系统;其中:仿生鱼摆动器,用于模拟被测仿生潜航器,通过连杆连接至动力驱动系统驱动输出端;动力驱动系统,收到同步触发信号之后,按照仿生潜航器的运动参数,驱动仿生摆动器在水箱中进行摆动运动,模拟仿生潜航器的真实运动;所述运动参数包括摆动频率f0和摆动幅值a0;高速成像系统,获取仿生摆动器在水箱中的摆动形态图像,收到同步触发信号之后,将仿生摆动器在水箱中的摆动形态图像发送给信息处理系统;piv测速仪,收到同步触发信号之后,用于定量化捕捉仿生摆动器运动状态,实时获取仿生摆动器的摆动作用下水箱中流体流场的速度和涡量,发送给信息处理系统;数据测量系统,收到同步触发信号之后,实时监测仿生摆动器运动状态下的噪声辐射特性、实时监测仿生摆动器运动状态下连杆的应变量,将真实噪声辐射特性和连杆的应变量发送给信息处理系统;信息控制系统,发送同步触发信号至动力驱动系统、高速成像系统和数据测量系统,统一控制仿生摆动系统、高速成像系统、数据测量系统的工作状态;信息处理系统,根据摆动形态图像,推算仿生摆动推进器的真实摆动频率f1和摆动幅值a1;根据连杆的应变量,计算被测仿生潜航器在摆动过程中产生的应力s1;根据仿生摆动器运动状态下的噪声辐射特性,通过噪声传感器内置的背景噪声滤波处理,提取仿生摆动推进器自身产生的噪声源及噪声级,根据piv测速仪得到的预设的时间段内流场速度,得到流场的平均速度v1,综合仿生摆动器的摆动频率、摆动幅值、噪声、应力、速度,对仿生摆动推进器的综合性能进行评价。2.根据权利要求1所述的一种仿生潜航器摆动推进性能一体化测试平台,其特征在于仿生鱼摆动器、动力驱动系统、高速成像系统、piv测速仪、数据测量系统、信息处理系统、信息控制系统的时间同步。3.根据权利要求1所述的一种仿生潜航器摆动推进性能一体化测试平台,其特征在于所述仿生推进器运动性能根据仿生推进器运动性能公式计算得到,仿生推进器运动性能公式为:其中,η是评价仿生摆动推进的综合指标参数,n1是噪声传感器测量的噪声辐射特性,s1是被测仿生潜航器在摆动过程中产生的应力;a1是被测仿生潜航器的摆动幅值,f1是被测仿生潜航器的运动频率;v1是流场的平均速度n0、s0、a0、f0、v0分别为噪声传感器、应力传感器、仿生鱼摆动幅值、频率、速度的设计参数值;c
i
为分指标参数的权重参数,i=1-5。4.根据权利要求3所述的一种仿生潜航器摆动推进性能一体化测试平台,其特征在于所述分指标参数的权重参数c
i
的取值范围为0~1。5.根据权利要求1所述的一种仿生潜航器摆动推进性能一体化测试平台,其特征在于所动力驱动系统采用动力驱动电机实现。6.根据权利要求1所述的一种仿生潜航器摆动推进性能一体化测试平台,其特征在于
所述数据测量系统包括应力传感器、噪声传感器;应力传感器,用于实时监测仿生摆动器运动状态下对连杆的应力应变作用;噪声传感器,用于实时监测仿生摆动器运动状态下的噪声辐射特性。
技术总结
本发明涉及一种仿生潜航器摆动推进性能一体化测试平台,包括仿生鱼摆动器,用于模拟被测仿生潜航器;动力驱动系统,用于动仿生摆动器在水箱中进行摆动运动;高速成像系统,获取仿生摆动器在水箱中的摆动形态图像;PIV测速仪,实时获取仿生摆动器的摆动作用下水箱中流体流场的速度;数据测量系统,实时监测仿生摆动器运动状态下的噪声辐射特性、实时监测仿生摆动器运动状态下连杆的应变量;信息控制系统,发送同步触发信号至动力驱动系统、高速成像系统和数据测量系统,统一控制仿生摆动系统、高速成像系统、数据测量系统的工作状态;信息处理系统,综合仿生摆动器的摆动频率、摆动幅值、噪声、应力、速度,对仿生摆动推进器的综合性能进行评价。合性能进行评价。合性能进行评价。
技术研发人员:马潇健 徐志程 詹景坤 赵静 王大鹏 魏洪亮 李明 秦芬 王琳娜 徐海运 刘凯悦 周晓彤 潘姝
受保护的技术使用者:中国运载火箭技术研究院
技术研发日:2021.12.14
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。