1.本发明涉及火灾图像处理技术领域,具体地说,涉及一种基于灰色综合关联度的火灾图像模糊隶属度识别方法。
背景技术:
2.火灾作为最常见的灾害之一,严重威胁着人们的生命和财产安全。木里火灾火场面积约20公顷,造成31人遇难。火灾现场救援过程中准确及时的识别目标一直是火灾防治领域的重要研究内容之一。传统的火灾检测方法有感温、感烟、感光等。目前针对火灾图像的偏色检测研究甚少,火灾场景包含大量的目标特征,这些特征是火灾图像识别的依据。但是,火灾场景环境复杂,不仅受自然光的影响,同时受燃烧物特性的影响,因此如何正确合理的进行火灾图像偏色检测是火灾现场图像及时准确识别的第一步。
3.目前,国内外学者对火灾图像处理及图像偏色检测进行了大量的研究。在火灾图像处理领域,主要集中在火灾图像分割、火灾图像识别、森林火灾探测等方面。在图像偏色检测领域,主要集中在道路偏色检测,医学细胞偏色检测、偏色检测算法、偏色校正等方面。
4.截止目前,国内外尚未有学者针对火灾现场图像偏色检测方法及偏色规律进行研究。
技术实现要素:
5.本发明的内容是提供一种基于灰色综合关联度的火灾图像模糊隶属度识别方法,其能够克服现有技术的某种或某些缺陷。
6.根据本发明的基于灰色综合关联度的火灾图像模糊隶属度识别方法,其包括以下步骤:
7.1)、读入待检图像和常规图像,对rgb色彩空间内的常规图像f(x,y)
rgb
进行偏色因子提取,根据kr、kg、kb的关系判断常规图像类别,同时确定相应的阈值大小;
8.2)、对待检图像和常规图像的偏色因子方差var数据进行罗曼洛夫斯基准则优化和区间值化算子数据优化,并对数据进行归一的预处理,同时生成待检图像偏色因子向量和常规图像偏色因子向量;
9.3)、基于待检图像偏色因子向量和常规图像偏色因子向量,根据相对关联度、接近关联度及最小二乘灰色关联度求解方法,求取综合灰色关联度;
10.4)、根据图像类型确定的阈值大小,结合隶属度函数求解代价图像隶属度值,基于最大隶属度原则判断待检图像是否为火灾图像。
11.作为优选,偏色因子及其方差var计算方法为:
12.[0013][0014][0015][0016][0017][0018][0019][0020]
其中dr、dg、db为rgb图像各个分量信息的平均值,m、n为图像的像素维数;mr、mg、mb为rgb图像各个分量信息偏色平均值;kr、kg、kb均为三个分量偏色因子,var为偏色因子方差。
[0021]
作为优选,根据kr、kg、kb的关系判断常规图像类别的方法为:
[0022]
当kr》kg且kr》kb时常规图像为红色类、当kg》kr且kg》kb时常规图像为绿色类,当kb》kr且kb》kg时常规图像为蓝色类。
[0023]
作为优选,罗曼洛夫斯基准则优化方法为:
[0024]
设对某量作多次等精度测量,得x1,x2,x3,
…
,xn,若认为测量值xi为可疑数据,则将其剔除后计算平均值,计算公式如下:
[0025][0026]
并求得测量列的标准差,计算公式如下:
[0027][0028]
根据测量次数n和选取的显著度α,即可由查表得到t分布的检验系数k(n,α);若则认为测量值xi含有粗大误差,剔除x是正确的;否则认为xi不含有粗大误差,应予以保留。
[0029]
作为优选,区间值化算子计算方法为:
[0030]
选择[0,1]区间值化算子,设对某量作多次等精度测量,得xi=(xi(1),xi(2),
…
,xi(n)),[0,1]区间化算子的计算公式如下:
[0031][0032]
作为优选,相对关联度γ
ij
计算方法为:
[0033]
a、求xi,xj初值像,得:
[0034][0035][0036]
b、求x
′0、x
′1的始点零化像,得:
[0037][0038][0039]
c、求参数|s
′i|,|s
′j|,|s
′
i-s
′j|,即:
[0040][0041][0042][0043]
d、计算灰色相对关联度:
[0044][0045]
接近关联度计算方法为:
[0046]
a、求参数|s
i-sj|,得:
[0047][0048]
b、计算灰色接近关联度:
[0049][0050]
最小二乘灰色关联度计算方法为:
[0051]
综合灰色关联度算子集结相对关联度和接近关联度,灰色综合关联度的计算公式如下:
[0052]
ω
ij
=θγ
ij
(1-θ)ε
ij
,θ∈[0,1]
[0053]
θ表示权重。
[0054]
本发明为提高火灾现场救援过程目标识别的准确度,研究火灾现场偏色检测方法及偏色特征,为火灾现场偏色校正提供技术支持。
附图说明
[0055]
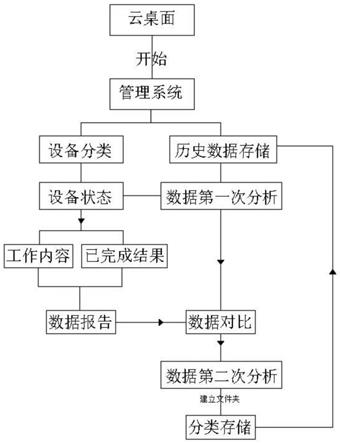
图1为实施例1中一种基于灰色综合关联度的火灾图像模糊隶属度识别方法的流程图;
[0056]
图2为实施例1中三种拍摄情景示意图;
[0057]
图3为实施例1中情景1、2、3在常规-常规场景下灰色综合关联度随权重θ变化分布图;
[0058]
图4为实施例1中情景1、2、3在火灾-火灾场景下灰色综合关联度随权重θ变化分布图;
[0059]
图5为实施例1中情景1、2、3在常规-火灾场景下灰色综合关联度随权重θ变化分布图。
具体实施方式
[0060]
为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。应当理解的是,实施例仅仅是对本发明进行解释而并非限定。
[0061]
实施例1
[0062]
如图1所示,本实施例提供了一种基于灰色综合关联度的火灾图像模糊隶属度识别方法,其包括以下步骤:
[0063]
1)、读入一幅待检图像和常规图像,对rgb色彩空间内的常规图像f(x,y)
rgb
进行偏色因子提取,根据kr、kg、kb的关系判断常规图像类别,即当kr》kg且kr》kb时常规图像为红色类、当kg》kr且kg》kb时常规图像为绿色类,当kb》kr且kb》kg时常规图像为蓝色类,同时确定相应的阈值大小;
[0064]
2)、对待检图像和常规图像的偏色因子var数据进行罗曼洛夫斯基准则优化,并对数据进行归一的预处理,同时生成待检图像偏色因子向量和常规图像偏色因子向量;
[0065]
3)、基于待检图像偏色因子向量和常规图像偏色因子向量,根据相对关联度、接近关联度及最小二乘灰色关联度求解方法,求取综合灰色关联度。
[0066]
4)、根据图像类型确定的阈值大小,结合隶属度函数求解代价图像隶属度值,基于最大隶属度原则判断待检图像是否为火灾图像。
[0067]
本实施例基于常见的三种色彩模式,利用偏色因子及偏色因子间方差var来研究常规场景与火灾场景下视频图像偏色问题。偏色因子及其方差var计算方法为:
[0068][0069][0070][0071][0072][0073][0074][0075][0076]
其中dr、dg、db为rgb图像各个分量信息的平均值,m、n为图像的像素维数;mr、mg、mb为rgb图像各个分量信息偏色平均值;kr、kg、kb均为三个分量偏色因子,var为偏色因子方差。
[0077]
待检图像和常规图像均是在特定时空条件下很短时间内(1/3秒内)通过视频监控拍摄而成的图像,其相邻图像的偏色因子大小分布满足均值分布,基于此原理在图像数据预处理时利用均值分布原理对原始数据做优化处理。目前针对均值分布数据长江的数据预
处理方法有3σ法则、罗曼洛夫斯基准则、格罗布斯准则、狄克松准则,其中3σ法则适用于测量数据较多的测量列,对于测量列数据较少的数据不可靠,格罗布斯准则对20-100的测量列效果较好,当测量数据较小时,需要适用罗曼洛夫斯基准则,而狄克松准则适用于需要快速判断粗大误差的情形。
[0078]
考虑到本文数据测量列特征(8-12个),应选择曼洛夫斯基准则进行数据的预处理。
[0079]
罗曼洛夫斯基准则优化方法为:
[0080]
设对某量作多次等精度测量,得x1,x2,x3,
…
,xn,若认为测量值xi为可疑数据,则将其剔除后计算平均值,计算公式如下:
[0081][0082]
并求得测量列的标准差,计算公式如下:
[0083][0084]
根据测量次数n和选取的显著度α,即可由查表得到t分布的检验系数k(n,α);若则认为测量值xi含有粗大误差,剔除x是正确的;否则认为xi不含有粗大误差,应予以保留。
[0085]
在对实际问题进行建模过程中,常常会面临不同类型数据处理及融合,而各个指标之间由于计量单位和数量级的不尽相同,从而使得各指标不具有可比性,在数据分析之前,则需要规范化处理。本文数据由于数量原因同样存在数据的无量纲化处理。常见的数据无量纲化方法有区间值化算子[37]、规范化算子、均值化算子、规范差化算子。其中,极值化算子按照规范化后取值范围分为三种,即[0,1]、[-∞,1];规范化算子是用每一个变量值与其平均值的差除以该变量的标准差,量化后各变量的均值为0,标准差为1;均值化算子是用每一个变量除以各变量均值,这种方法消除量纲和数量级影响同时,保留了各变量取值差异程度上的信息;规范差化方法是用每个变量除以标准差所得,规范化后各变量的均值为0。
[0086]
区间值化算子计算方法为:
[0087]
考虑到本实施例数据中相对关联度和接近关联度计算的实际需要,选择[0,1]区间值化算子,原因在于这样才使得关联度大小更为直观。设对某量作多次等精度测量,得xi=(xi(1),xi(2),
…
,xi(n)),[0,1]区间化算子的计算公式如下:
[0088][0089]
常见的灰色关联度的类型邓氏灰色关联度、绝对灰色关联度、相对灰色关联度、相似灰色关联度、接近灰色关联度等。设x0=(x0(1),x0(2),
…
,x0(n))为系统特征行为序列,且为相关因素序列。给定实数γ(x0(k),xi(k))满足:
[0090]
(1)规范性:0《γ(x0,xi)≤1,
[0091]
(2)接近性:|x0(k)-xi(k)|越小,γ(x0(k),xi(k))越大
[0092]
则称γ(x0,xi)为x0与xi的灰色关联度。
[0093][0094]
相对关联度γ
ij
计算方法为:
[0095]
a、求xi,xj初值像,得:
[0096][0097][0098]
b、求x
′0、x
′1的始点零化像,得:
[0099][0100][0101]
c、求参数|s
′i|,|s
′j|,|s
′
i-s
′j|,即:
[0102][0103][0104][0105]
d、计算灰色相对关联度:
[0106][0107]
接近关联度计算方法为:
[0108]
a、求参数|s
i-sj|,得:
[0109][0110]
b、计算灰色接近关联度:
[0111][0112]
最小二乘灰色关联度计算方法为:
[0113]
综合灰色关联度算子集结相对关联度和接近关联度,灰色综合关联度的计算公式如下:
[0114]
ω
ij
=θγ
ij
(1-θ)ε
ij
,θ∈[0,1]。
[0115]
实验与讨论
[0116]
实验数据
[0117]
为了验证本文方法的有效性,使用自建数据库进行测试实验。自建数据库图像来自相机canon 80d,火灾燃烧物为0.5l溶剂油,燃烧池为直径为10cm火盆,为了燃烧的充分性与稳定性在火盆中加入1l常温水(约18℃),同时用一套热电偶记录火焰温度。自建数据库来自三种情景,情景1为黑色物体,情景2为多数为红色的物体,情景3为蓝色物体(见图2)。本文选择上述三种情景主要原因在于纯黑色对光的吸收性最好,红色背景最接近火灾颜色特征,纯蓝色是图像的三原色之一。
[0118]
实验过程中首先通过相机在自然光场景(以下简称常规场景)和火灾场景下针对上述三种情景进行拍摄,每种情景拍摄16张,总计2
×3×
16=96张图像。其中,常规场景是指在自然光条件下,首先定义拍摄时的白平衡,然后在此白平衡模式下拍摄上述3种情景,认为此白平衡下的3种情景均无偏色,颜色信息符合人类视觉反映。火灾场景是指在常规场景拍摄时定义的白平衡模式下,在暗室(2m
×
2m)中(无自然光)拍摄3种情景,同时利用热电偶记录火焰温度,约600℃。最后,利用matlab软件计算对96张图像在rgb色彩模式下计算偏色因子kr、kg、kb,及方差因子var大小。
[0119]
检测结果可视化分析
[0120]
计算三种场景下情景1、2、3相对关联度和接近关联度大小表3),同时计算三种场景下情景1、2、3灰色综合关联度分别随权重θ变化分布表(表4),同时绘制可视化分布图(图3、图4、图5)。从表3、表4、图3、图4、图5可以看出:
[0121]
1)针对三种场景下情景1、2、3,从关联度大小视角看接近关联度相对于相对关联度具有较好的优势,单一场景下情景1、2、3的接近关联度ε≥0.9600,而相对关联度大小0.84≤γ《0.96,混合场景下情景1、2、3的接近关联度0.60《ε《0.82,而相对关联度0.53≤γ《0.61。因此,相对关联度和接近关联度对于识别火灾场景各有其优势。
[0122]
2)针对三种场景下情景1、2、3,随着权重θ值的增加,其综合关联度大小均随之减小;同时,针对某一情景而言,单一场景与混合场景下灰色综合关联度离差值也逐渐减小。因此,其权重值的选取应该应分布在区间中间区域。
[0123]
3)对于情景1和情景3而言,其混合场景与单一场景灰色综合关联度均值的差值在θ=0.9处均取得最大值;对于情景2而言,其混合场景与单一场景灰色综合关联度均值的差值在θ=0.1处均取得最大值。因此,火灾图形识别过程中针对不同的情景类别应当选择不同权重值θ大小。
[0124]
4)根据阈值选取公式
[0125][0126]
情景1、情景2、情景3的灰色综合关联度阈值t分别:t1=0.7603、t2=0.8683、t3=0.7502。
[0127]
5)对于情景1,由min{ω
常规-常规
,ω
火灾-火灾
}=0.8939、ω
常规-火灾
=0.6266、t1=0.7603可建立火灾图像隶属度函数为:
[0128][0129]
其中,f
情景1
(x,y)=1表示识别结果为火灾图像,f
情景1
(x,y)=0表示识别结果为非火灾图像,f
情景1
(x,y)∈[0.1]为识别结果为火灾图像和非火灾图像的隶属度大小。
[0130]
同理,情景2、情景3火灾图像的隶属度函数分别为:
[0131][0132][0133]
表3三种场景下情景1、2、3相对关联度和接近关联度大小
[0134][0135]
表4三种场景下情景1、2、3灰色综合关联度随权重θ变化分布表
[0136][0137]
检测结果回归分析
[0138]
如表5所示为三种场景三种情景灰色综合关联度ω关于权值θ线性回归参数分布结果,参数分别为斜率(k)、截距(b)、以及残差范数(l)。从表5可以看出:
[0139]
1)从单一场景(常规-常规场景、火灾-火灾场景)到混合场景(常规-火灾场景),其斜率(k)均减小,说明随着权重θ的增加,灰色综合关联度的变化率也增加,从而表明灰色综合关联度是识别火灾图像的较稳定特征。
[0140]
2)从单一场景(常规-常规场景、火灾-火灾场景)看,从情景1到情景2在再到情景3,随着情景类型的变化,其斜率(k)变化幅度δk《0.1,说明随着权重θ的增加,灰色综合关联度的变化范围较小,从而表明单一场景下灰色综合关联度特征较稳定。
[0141]
3)从混合场景(常规-火灾场景)看,从情景1到情景2再再到情景3,随着情景类型的变化,其斜率(k)变化幅度δk》0.1,说明随着权重θ的增加,灰色综合关联度的变化范围较大,从而表明与单一场景相比,灰色综合关联度能较好的量化火灾图像与非火灾图像之间的差异。
[0142]
表5三种场景下三种情景灰色综合关联度ω关于权值θ的线性回归参数表
[0143][0144]
结论
[0145]
(1)从常规-常规场景看,在rgb色彩模式下接近关联度识别三种情景的火灾图像效果最好;
[0146]
(2)不同时空条件下常规场景与火灾场景内比三种情景偏色因子趋势均相互交叠,同时随情景颜色色温的变化,偏色因子交叠趋势也发生着变化;
[0147]
(3)同一时空条件下常规场景与火灾场景之间的三种情景偏色度呈现明显的欧式距离特征。
[0148]
本方法有效避免了主流方法易受图像形成过程色温变化和数据测量的偶然误差的综合影响,有效的提供了一种针对火灾场景下各类情景火灾图像偏色度量化方法,在火灾场景目标识别中具有较强的技术指导和实际应用价值。
[0149]
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。