一种无人机与互联车辆wlan系统的同频干扰表征方法
技术领域
1.本发明涉及无人机通信技术领域,特别涉及一种无人机与互联车辆wlan系统的同频干扰表征方法。
背景技术:
2.近年来,无人机通信系统凭借机动灵活,可控能力强,易于部署等优点,成为无线通信领域广泛研究热点。为了为“无人机互联网”时代奠定基础,无人机通信必须支持覆盖面无处不在、低延迟、高可靠性、高吞吐量,以实现无人机的安全运行。相比于地面通信由于多径和障碍物以非视距(non-line-sight,nlos)传输为主,无人机通信可根据实际地理位置灵活部署无人机,通过视距(line-sight,los)传输,有效降低路径损耗,大大提升系统通信性能。然而在频谱资源日益紧缺的背景下,无人机网络所工作的频段资源紧张,导致业务间同频干扰日益严重,通信质量无法得到有效保障。在无人机频谱资源配置与使用方面,通信链路的频段选择和带宽需求与频谱资源紧缺之间的矛盾尤为突出,已经成为关系到无人机产业健康发展的重要内容之一。
3.无线局域网(wireless local area network,wlan)由于传输效率高、扩展性好等优点,在车辆的互联中得到了广泛应用,其中ieee802.11系列的wlan技术将会得到最迅猛的发展,被称为解决终端最后100m接入问题的有效方案。ieee 802.11b/g协议规定的无线局域网技术也工作在ism频段内,无人机与互联车辆wlan系统在使用过程中可能存在频谱干扰问题,对各自的通信性能造成一定的影响。未来互联车辆wlan的密集部署和通信带宽的增大,势必导致ism频段更加“拥挤”,同频干扰将越来越严重。因此,评估无人机通信与互联车辆wlan系统的同频干扰情况并提高其频谱效率,成为了关键性问题。目前,针对无人机同频干扰的研究中,尚未提出一直灵巧的干扰分析方法,能很好的表征在无人机与互联车辆wlan系统的干扰的动态变化规律。
技术实现要素:
4.发明目的:本发明提供一种无人机与互联车辆wlan系统的同频干扰表征方法,以解决现有技术无法很好的表征无人机与互联车辆wlan系统同频干扰的技术问题。
5.本发明具体包括:
6.构建无人机与互联车辆wlan系统同频干扰模型;其中,基于mcl方法,模拟无人机在卫星固定服务通信时,对互联车辆wlan系统的真实干扰效果,假设卫星、无人机和受干扰的互联车辆wlan接收器位于同一水平线上,它们在无人机和受干扰接收器之间的方向角方向上彼此指向对方;
7.考虑受干扰接收机的天线方向相对自由,假设为直接指向无人机,元件和阵列增益设置为最大值;研究受干扰接收器的频率相关抑制以适应信道干扰,在无人机通信中采用两种正交频分复用波形:循环前缀正交频分复用和加窗正交频分复用,以抑制其带外发射,减轻相邻信道干扰;
8.考虑到实际的接收机滤波器,对实际接收机滤波器的频率响应进行建模,并推导出两个正交频分复用波形在不同保护频带下的频率相关抑制的数学表达式;
9.假设无人机以恒定的高度和仰角飞行,其中,θ
ele
表示卫星的仰角,即无人机的天线仰角,该仰角由上行链路路径与无人机的运行轨迹方向形成,干扰路径是从无人机到受干扰互联车辆业务的连线,它与无人机的上行链路路径形成了离轴角
10.基于所述同频干扰模型,提出同频干扰表征方法,确定目标终端受到的干扰,计算所述目标终端的接收信噪比,确定无人机对互联车辆wlan系统的同频干扰,并以信噪比作为指标对无人机对互联车辆wlan系统的同频干扰进行表征,确定无人机的相关运行标准。
11.进一步地,所述计算同频干扰的干扰表征方法,包括:
12.基于所述同频干扰模型,计算互联车辆wlan的接收信噪比作为干扰分析的指标,它可以通过将干扰功率除以受干扰系统的总功率来计算。在所述干扰场景下,通过计算在不同距离下,无人机和受干扰互联车辆接收器之间的干扰噪声比,与互联车辆wlan系统的保护标准进行对比,确定无人机和互联车辆wlan系统的的最小分离距离,以不对互联车辆wlan系统产生强烈干扰。受干扰互联车辆系统接收到来自无人机的aci干扰功率如下所示:
13.i
aci
=p
aero_uav-a
uav-p
fs-p
fuselage-p
atmospheric
g
r-fdr
14.其中,p
aero_uav
是无人机的偏轴等效全向辐射功率e.i.r.p.,a
uav
是无人机与wlan之间由于带宽不匹配而导致的调整因子,p
fs
是自由空间衰减,p
fuselage
是无人机的机身损耗,p
atmosphecri
是大气气体损耗,gr是受干扰接收器的天线增益,fdr是频率相关抑制(频响比)。
15.由于干扰功率超过了某个值,来自无人机的aci导致受干扰系统中断,因此,无人机的干扰功率需要在受干扰系统的可接受范围之内,受干扰系统的最大可接受干扰可由信噪比阈值计算得出,如下所示:
16.i
th
=i/n
th
n
nol
17.其中,n
nol
是受干扰系统的总噪声功率(考虑热噪声和噪声系数),需要根据不同业务的信噪比阈值来确定不同的最大可接收干扰。对于n
nol
,它主要与受干扰系统的温度、带宽和噪声系数有关,具体表示如下:
18.n
nol
=10log(kt) nf 10log(bw
victim
)
19.其中,k是玻尔兹曼常数,t是受干扰系统的温度(单位是k),bw
victim
是受干扰系统的带宽,nf是噪声系数。
20.进一步地,基于所述信噪比阈值,确定同频干扰中干扰功率的各分量,其中:
21.计算偏轴等效全向辐射功率,根据wrc-19颁布的相关决议和标准,参考itu-rs.524-9,偏轴等效全向辐射功率p
aero_uav
是输出功率和天线增益在偏轴角为时的总和,可表示如下:
[0022][0023]
计算自由空间损耗,无人机与受干扰互联车辆接收器之间的链路损耗采用自由空
间损耗模型,参考itu-r p.525,具体表示如下:
[0024]
p
fs
=92.4 20log
10
f 20log
10d[0025]
式中,f为频率(ghz),d为无人机与wlan的距离(km);
[0026]
计算无人机的机身损耗,信号衰减发生在无人机机身,参考itu-r m.2221建议书中的模型,基于mcl方法,假设最坏的干扰情况下,可将该模型应用于本发明中来计算机身损耗;
[0027]
计算大气气体衰减,对于已知气温、干空气气压和水汽密度的分度,可以通过逐线方法计算无人机与互联车辆wlan系统的下行路径气体衰减,高度h1和h2之间(h2>h1≥0km)下行路径倾斜路径的气体衰减为:
[0028][0029]
其中:
[0030][0031]
γ(h)是高度h的比衰减,re是平均地球半径(6371千米),是高度h1的局部视在仰角,n(h)是高度h的折射率;气体比衰减通过以下公式计算:
[0032]
γ=γo γw=0.1820f(n"
oxygen
(f) n"
watervapour
(f))(db/km)
[0033]
其中,γo和γw分别是干空气(氧气条件下,由气压造成的氮和非共振德拜衰减)和水汽条件下的比衰减(单位是db/km),f是频率(单位是ghz),n"
oxygen
(f)和n"
watervapour
(f)是该频率相关的负折射率的虚部:
[0034]
n"
oxygen
(f)=∑
i(oxygen)sifi
n"d(f)
[0035]
n"
watervapour
(f)=∑
i(watervapour)sifi
[0036]
i(oxygen)表示氧气谱线数据,i(watervapour)表示水汽谱线数据,si是第i条氧气或水汽谱线强度,fi是氧气或水汽谱线形状因子,下述中a1、a2、a3、a4、a5、a6分别表示根据国际电信联盟颁布的全球平均参考大气数据中的氧气谱线数据的2-7列,b1、b2、b3、b4、b5、b6分别表示根据国际电信联盟颁布的全球平均参考大气数据中的水汽谱线数据的2-7列。
[0037]
n"d(f)是由气压造成的氮吸收以及德拜频谱产生的干空气连续吸收谱,计算公式如下:
[0038]
谱线强度为:
[0039]
对于氧气,si=a1×
10-7
pθ3exp[a2(1-θ)],
[0040]
对于水汽,si=b1×
10-1
eθ
3.5
exp[b2(1-θ)],
[0041]
其中,p为干空气气压,单位为hpa;e为水汽分压,单位为hpa(总气压,p
tol
=p e);θ=300/t;t是温度,单位为k,任何高度的水汽分压e可以通过该高度的水汽密度ρ和温度t计算得到,公式为:
[0042][0043]
谱线形状因子计算如下:
[0044][0045]
其中,fi是氧气或水汽谱线频率,δf是谱线宽度:
[0046]
对于氧气,
[0047]
对于水汽,
[0048]
修改谱线宽度δf,将氧气谱线的塞曼分裂和水汽谱线的多普勒展宽考虑在内:
[0049]
对于氧气,
[0050]
对于水汽,
[0051]
由于在氧气线中的干扰影响,δ是修正因子:
[0052]
对于氧气,δ=(a5 a6θ)
×
10-4
(p e)θ
0.8
,
[0053]
对于水汽,δ=0,
[0054]
干空气连续带来自于10ghz以下的氧气的非共振德拜频谱以及100ghz以上的由气压造成的氮衰减:
[0055][0056]
其中,dn是德拜频谱的宽度参数:
[0057]dn
=5.6
×
10-4
(p e)θ
0.8
。
[0058]
计算频率相关抑制,在频率共享研究中,频率相关抑制(fdr)是由接收机的信道选择性和发射机的无用发射决定的,可通过下式计算得出:
[0059][0060]
其中,φ(f)是干扰信号的功率谱密度,ψ(f)是接收机的归一化频率响应,δf2是频率偏移。保护频带可以通过频率偏移来计算得出:
[0061][0062]
其中,w
t
是发射机的信道带宽,wr是接收机的信道带宽;
[0063]
在本发明中,计算fdr用到了两种正交频分复用信号,分别是循环前缀正交频分复用(cp-ofdm)和加窗正交频分复用,通过接收机建模得出实际频率响应,根据信号的类型计算出fdr;在计算频响比时,该值可由发射信号的功率谱密度和接收机的频率响应决定,接收机的理想频率响应是整个接收信道带宽上的平坦响应,但在本发明中,为了实现接收机的实际频率响应,将其以下式建模:
[0064][0065]
其中,bb是阻带衰减,wf是平坦响应的带宽,w
t
是转换带宽;
[0066]
当副载波之间的正交性被破坏后,正交频分复用会引起符号间干扰和信道间干扰,为了解决这一问题,通过放置数据符号之间的保护间隔来执行循环前缀,这被称为循环前缀正交频分复用,其基带信号表示如下:
[0067][0068]
其中,n是子载波的数量,c
n,k
是在第n个正交频分复用符号的第k个子载波上调制的数据符号,p(t)是脉冲整形窗口,ts是数据符号的长度,tg是保护间隔。当每个子载波在统计上独立并相互正交时,应用任意脉冲整形窗口的正交频分复用干扰信号的功率谱密度可表示如下:
[0069][0070]
其中,ps是子载波的功率,p(f)是脉冲整形窗口的傅里叶变化,t
total
=ts tg是总符号持续时间,循环前缀正交频分复用子载波使用时域中的矩形脉冲整形窗口,表示如下:
[0071][0072]
该信号傅里叶变换可表示如下:
[0073]
p
cp
(f)=t
total
·
sin c(t
total f),
[0074]
其中sin c(x)=sin(xπ)/xπ,计算得到循环前缀正交频分复用的功率谱密度,如下所示:
[0075][0076]
加窗正交频分复用是一种提高频谱效率的技术,因为它使用了比循环前缀频分复用中使用的矩形脉冲整形窗口更加平滑的窗口;对于加窗正交频分复用,在时域中使用升余弦函数的窗口,如下所示:
[0077][0078]
其中,t
tr
是过渡时间,t=t
total
t
tr
是窗口持续时间;加窗正交频分复用在过渡期间具有平滑的弯曲形状,傅里叶变换如下所示:
[0079][0080]
计算加窗正交频分复用的功率谱密度,如下所示:
[0081][0082]
基于正交频分复用波形的功率谱密度,计算频率相关抑制:
[0083][0084]
其中,发射信号的功率
[0085]
基于所述同频干扰表征方法,确定无人机对互联车辆wlan系统的同频干扰,给出无人机的相关运行标准。
[0086]
本发明提供的技术方案带来的有益效果包括:
[0087]
本发明提出了一种合适的建模方式,用于分析无人机与互联车辆wlan同频干扰估计时的系统特性。本发明基于mcl方法,模拟无人机在卫星固定服务通信时,对互联车辆wlan系统的真实干扰效果,假设卫星、无人机和受干扰的互联车辆wlan接收器位于同一水平线上,它们在无人机和受干扰接收器之间的方向角方向上彼此指向对方;考虑受干扰接收机的天线方向相对自由,假设为直接指向无人机,元件和阵列增益设置为最大值;研究受干扰接收器的频率相关抑制以适应信道干扰,在无人机通信中采用两种正交频分复用波形:循环前缀正交频分复用和加窗正交频分复用,以抑制其带外发射,减轻相邻信道干扰;同时研究无人机对互联车辆wlan系统的同频干扰,提出同频干扰表征方法,以受干扰系统接收信号信噪比为指标,计算干扰功率各分量,给出无人机的相关运行标准。本发明可为无人机干扰规避,系统用频规则等技术研究提供指导意见。
附图说明
[0088]
下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述和/或其他方面的优点将会变得更加清楚。
[0089]
图1是本发明提出的人机与互联车辆wlan系统的同频干扰表征方法的执行流程示意图;
[0090]
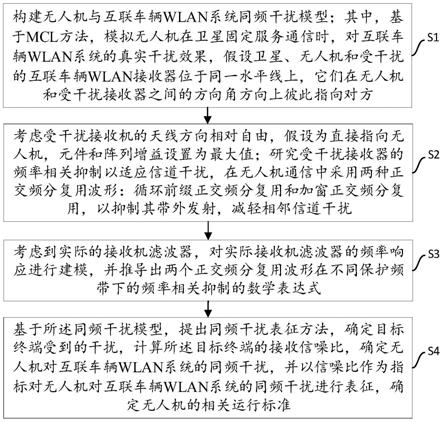
图2是本发明提出的无人机与互联车辆wlan系统的同频干扰场景示意图;
具体实施方式
[0091]
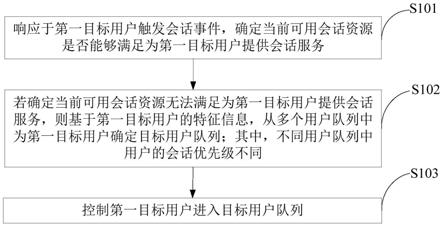
本发明提供了一种无人机与互联车辆wlan系统的同频干扰表征方法,包括以下步骤:
[0092]
步骤1,构建无人机与互联车辆wlan系统同频干扰模型;
[0093]
步骤2,设定受干扰互联车辆wlan接收器的天线方向直接指向无人机,元件和阵列增益设置为最大值;计算互联车辆wlan系统的接收信噪比;对于受干扰互联车辆wlan接收器的频率相关抑制以适应信道干扰,在无人机通信中采用两种正交频分复用波形:循环前缀正交频分复用和加窗正交频分复用,以抑制发射信号的带外发射,减轻相邻信道干扰;
[0094]
步骤3,推导出两个正交频分复用波形在不同保护频带下的频率相关抑制的数学表达式;
[0095]
步骤4,根据步骤2计算得到的互联车辆wlan系统的接收信噪比,与国际电信联盟确定的保护标准做对比,对无人机对互联车辆wlan系统的同频干扰进行表征,确定无人机的相关运行标准。
[0096]
步骤1包括:基于最小耦合损耗(mcl)方法,模拟无人机在卫星固定服务通信时,对互联车辆wlan系统的真实干扰效果,设定卫星、无人机和受干扰的互联车辆wlan接收器位于同一水平线上,且彼此指向对方。
[0097]
步骤1中,所述构建无人机与互联车辆wlan系统同频干扰模型,包括:
[0098]
设定无人机以恒定的高度和仰角飞行,其中,θ
ele
表示卫星的仰角,即无人机的天线仰角,卫星的仰角由上行链路路径与无人机的运行轨迹方向形成,干扰路径是从无人机到受干扰互联车辆业务的连线,干扰路径与无人机的上行链路路径形成了离轴角
[0099]
步骤2包括:基于所述同频干扰模型和目标终端的位置信息确定可能对目标终端形成同频干扰的无人机,计算无人机干扰信号各功率分量,具体包括:
[0100]
基于所述同频干扰模型,受干扰互联车辆系统接收到来自无人机的邻信道干扰(aci)功率i
aci
如下所示:
[0101]iaci
=p
aero_uav-a
uav-p
fs-p
fuselage-p
atmospheric
g
r-fdr
[0102]
其中,p
aero_uav
是无人机的偏轴等效全向辐射功率e.i.r.p.,a
uav
是无人机与互联车辆wlan系统之间由于带宽不匹配而导致的调整因子,p
fs
是自由空间衰减,p
fuselage
是无人机的机身损耗,p
atmosphecri
是大气气体损耗,gr是受干扰互联车辆wlan系统的天线增益,fdr是频率相关抑制;
[0103]
受干扰系统的最大可接受干扰由信噪比阈值计算得出,如下所示:
[0104]ith
=i/n
th
n
nol
[0105]
其中,i
th
是干扰功率阈值,i/n
th
是信噪比阈值,n
nol
是受干扰系统的总噪声功率,
具体表示如下:
[0106]nnol
=10log(kt) nf 10log(bw
victim
)
[0107]
其中,k是玻尔兹曼常数,t是受干扰系统的温度,bw
victim
是受干扰系统的带宽,nf是噪声系数。
[0108]
采用如下公式计算无人机的偏轴等效全向辐射功率p
aero_uav
:
[0109][0110]
采用如下公式计算自由空间衰减p
fs
:
[0111]
p
fs
=92.4 20log
10
f 20log
10
d,
[0112]
式中,f为频率,d为无人机与互联车辆wlan系统的距离。
[0113]
所述大气气体损耗计算方法如下:
[0114]
对于已知气温、干空气气压和水汽密度的分度,通过逐线方法计算无人机与互联车辆wlan系统的下行路径气体衰减,高度h1和h2之间下行路径倾斜路径的气体衰减p
gas
为:
[0115][0116]
其中:
[0117][0118]
是根据高度不同的仰角,γ(h)是高度h的比衰减,re是平均地球半径,是高度h1的局部视在仰角,n(h)是高度h的折射率;
[0119]
气体比衰减通过以下公式计算:
[0120]
γ=γo γw=0.1820f(n"
oxygen
(f) n"
watervapour
(f)),
[0121]
其中,γ是总的气体比衰减,γo和γw分别是干空气条件下的比衰减和水汽条件下的比衰减,n"
oxygen
(f)和n"
watervapour
(f)是分别是氧气关于频率f的负折射率的虚部和水蒸气关于频率f的负折射率的虚部:
[0122]
n"
oxygen
(f)=∑
i(oxygen)sifi
n"d(f),
[0123]
n"
watervapour
(f)=∑
i(watervapour)sifi
,
[0124]
其中,i(oxygen)表示氧气谱线数据,i(watervapour)表示水汽谱线数据,si是第i条氧气或水汽谱线强度,fi是氧气或水汽谱线形状因子,下述中a1、a2、a3、a4、a5、a6分别表示根据国际电信联盟颁布的全球平均参考大气数据中的氧气谱线数据的2-7列,b1、b2、b3、b4、b5、b6分别表示根据国际电信联盟颁布的全球平均参考大气数据中的水汽谱线数据的2-7列;
[0125]
n"d(f)是由气压造成的氮吸收以及德拜频谱产生的干空气连续吸收谱,计算公式如下:
[0126]
第i条氧气或水汽谱线强度为:
[0127]
对于氧气,si=a1×
10-7
pθ3exp[a2(1-θ)],
[0128]
对于水汽,si=b1×
10-1
eθ
3.5
exp[b2(1-θ)],
[0129]
其中,p为干空气气压;e为水汽分压;θ=300/t;t是温度;任何高度的水汽分压e通过对应高度的水汽密度ρ和温度t计算得到,公式为:
[0130][0131]
氧气或水汽谱线形状因子计算如下:
[0132][0133]
其中,fi是氧气或水汽谱线频率,δf是谱线宽度:
[0134]
对于氧气,
[0135]
对于水汽,
[0136]
修改谱线宽度δf:
[0137]
对于氧气,
[0138]
对于水汽,
[0139]
δ是修正因子:
[0140]
对于氧气,δ=(a5 a6θ)
×
10-4
(p e)θ
0.8
,
[0141]
对于水汽,δ=0,
[0142]
得到:
[0143][0144]
其中,dn是德拜频谱的宽度参数:
[0145]dn
=5.6
×
10-4
(p e)θ
0.8
。
[0146]
步骤3中,采用如下公式计算频率相关抑制fdr:
[0147][0148]
其中,φ(f)是干扰信号的功率谱密度,ψ(f)是受干扰的互联车辆wlan接收器的归一化频率响应,δf2是频率偏移;
[0149]
通过频率偏移来计算保护频带gb:
[0150][0151]
其中,w
t
是无人机发射干扰信号的信道带宽,wr是受干扰的互联车辆wlan接收器的信道带宽;
[0152]
建模:
[0153][0154]
其中,bb是阻带衰减,wf是平坦响应的带宽,w
t
是转换带宽;
[0155]
循环前缀正交频分复用的基带信号s(t)表示如下:
[0156][0157]
其中,n表示求和的数量,从负无穷到正无穷求和;n是子载波的数量,c
n,k
是在第n个正交频分复用符号的第k个子载波上调制的数据符号,p(t)是脉冲整形窗口,ts是数据符号的长度,tg是保护间隔;
[0158]
当每个子载波在统计上独立并相互正交时,应用任意脉冲整形窗口的正交频分复用干扰信号的功率谱密度表示如下:
[0159][0160]
其中,ps是子载波的功率,p(f)是脉冲整形窗口的傅里叶变化,t
total
=ts tg是总符号持续时间,循环前缀正交频分复用子载波使用时域中的矩形脉冲整形窗口p
cp
(t),表示如下:
[0161][0162]
信号傅里叶变换pcp(f)表示如下:
[0163]
p
cp
(f)=t
total
·
sinc(t
total
f),
[0164]
其中函数sinc(x)=sin(xπ)/xπ,sinc(x)是一个固定函数,计算得到循环前缀正交频分复用的功率谱密度φ
cp
(f):
[0165][0166]
对于加窗正交频分复用,在时域中使用升余弦函数的窗口,如下所示:
[0167][0168]
其中,t
tr
是过渡时间,t=t
total
t
tr
是窗口持续时间;加窗正交频分复用在过渡期间具有平滑的弯曲形状,p
wo
(t)是加窗正交频分复用的窗口函数,傅里叶变换如下所示:
[0169][0170]
计算加窗正交频分复用的功率谱密度φ
wo
(f):
[0171][0172]
基于正交频分复用波形的功率谱密度,计算频率相关抑制:
[0173][0174]
其中,发射信号的功率
[0175]
实施例
[0176]
本实施例提供了一种无人机与互联车辆wlan系统的同频干扰表征方法,该方法的执行流程如图1、图2所示,包括以下步骤:
[0177]
s1,构建无人机与互联车辆wlan系统同频干扰模型;其中,基于mcl方法,模拟无人机在卫星固定服务通信时,对互联车辆wlan系统的真实干扰效果,假设卫星、无人机和受干扰的互联车辆wlan接收器位于同一水平线上,它们在无人机和受干扰接收器之间的方向角方向上彼此指向对方;
[0178]
s2,考虑受干扰接收机的天线方向相对自由,设定为直接指向无人机,元件和阵列增益设置为最大值;研究受干扰接收器的频率相关抑制以适应信道干扰,在无人机通信中采用两种正交频分复用波形:循环前缀正交频分复用和加窗正交频分复用,以抑制其带外发射,减轻相邻信道干扰;
[0179]
s3,考虑到实际的接收机滤波器,对实际接收机滤波器的频率响应进行建模,并推导出两个正交频分复用波形在不同保护频带下的频率相关抑制的数学表达式;设无人机以恒定的高度和仰角飞行,其中,θ
ele
表示卫星的仰角,即无人机的天线仰角,该仰角由上行链路路径与无人机的运行轨迹方向形成,干扰路径是从无人机到受干扰互联车辆业务的连
线,它与无人机的上行链路路径形成了离轴角
[0180]
s4,基于所述同频干扰模型,提出同频干扰表征方法,确定目标终端受到的干扰,计算所述目标终端的接收信噪比,确定无人机对互联车辆wlan系统的同频干扰,并以信噪比作为指标对无人机对互联车辆wlan系统的同频干扰进行表征,确定无人机的相关运行标准。
[0181]
进一步地,所述计算同频干扰的干扰表征方法,包括:
[0182]
基于所述同频干扰模型,计算互联车辆wlan的接收信噪比作为干扰分析的指标,它可以通过将干扰功率除以受干扰系统的总功率来计算。在所述干扰场景下,通过计算在不同距离下,无人机和受干扰互联车辆接收器之间的干扰噪声比,与互联车辆wlan系统的保护标准进行对比,确定无人机和互联车辆wlan系统的的最小分离距离,以不对互联车辆wlan系统产生强烈干扰。受干扰互联车辆系统接收到来自无人机的aci干扰功率如下所示:
[0183]iaci
=p
aero_uav-a
uav-p
fs-p
fuselage-p
atmospheric
g
r-fdr
[0184]
其中,p
aero_uav
是无人机的偏轴等效全向辐射功率e.i.r.p.,a
uav
是无人机与wlan之间由于带宽不匹配而导致的调整因子,p
fs
是自由空间衰减,p
fuselage
是无人机的机身损耗,p
atmosphecri
是大气气体损耗,gr是受干扰接收器的天线增益,fdr是频率相关抑制(频响比)。
[0185]
由于干扰功率超过了某个值,来自无人机的aci导致受干扰系统中断,因此,无人机的干扰功率需要在受干扰系统的可接受范围之内,受干扰系统的最大可接受干扰可由信噪比阈值计算得出,如下所示:
[0186]ith
=i/n
th
n
nol
[0187]
其中,n
nol
是受干扰系统的总噪声功率(考虑热噪声和噪声系数),需要根据不同业务的信噪比阈值来确定不同的最大可接收干扰。对于n
nol
,它主要与受干扰系统的温度、带宽和噪声系数有关,具体表示如下:
[0188]nnol
=10log(kt) nf 10log(bw
victim
)
[0189]
其中,k是玻尔兹曼常数,t是受干扰系统的温度(单位是k),bw
victim
是受干扰系统的带宽,nf是噪声系数。
[0190]
进一步地,基于所述信噪比阈值,确定同频干扰中干扰功率的各分量,其中:
[0191]
计算偏轴等效全向辐射功率,根据wrc-19颁布的相关决议和标准,参考itu-rs.524-9,偏轴等效全向辐射功率p
aero_uav
是输出功率和天线增益在偏轴角为时的总和,可表示如下:
[0192][0193]
进一步地,计算自由空间损耗,无人机与受干扰互联车辆接收器之间的链路损耗采用自由空间损耗模型,参考itu-r p.525,具体表示如下:
[0194]
p
fs
=92.4 20log
10
f 20log
10d[0195]
式中,f为频率(ghz),d为无人机与wlan的距离(km);
[0196]
进一步地,计算无人机的机身损耗,信号衰减发生在无人机机身,参考itu-rm.2221建议书中的模型,基于mcl方法,假设最坏的干扰情况下,可将该模型应用于本发明中来计算机身损耗;
[0197]
进一步地,计算大气气体衰减,对于已知气温、干空气气压和水汽密度的分度,可以通过逐线方法计算无人机与互联车辆wlan系统的下行路径气体衰减,高度h1和h2之间(h2>h1≥0km)下行路径倾斜路径的气体衰减为:
[0198][0199]
其中:
[0200][0201]
γ(h)是高度h的比衰减,re是平均地球半径(6371千米),是高度h1的局部视在仰角,n(h)是高度h的折射率;气体比衰减可通过以下公式计算:
[0202]
γ=γo γw=0.1820f(n"
oxygen
(f) n"
watervapour
(f))(db/km)
[0203]
其中,γo和γw分别是干空气(氧气条件下,由气压造成的氮和非共振德拜衰减)和水汽条件下的比衰减(单位是db/km),f是频率(单位是ghz),n"
oxygen
(f)和n"
watervapour
(f)是该频率相关的负折射率的虚部:
[0204]
n"
oxygen
(f)=∑
i(oxygen)sifi
n"d(f)
[0205]
n"
watervapour
(f)=∑
i(watervapour)sifi
[0206]
其中,i(oxygen)表示氧气谱线数据,i(watervapour)表示水汽谱线数据,si是第i条氧气或水汽谱线强度,fi是氧气或水汽谱线形状因子,下述中a1、a2、a3、a4、a5、a6分别表示根据国际电信联盟颁布的全球平均参考大气数据中的氧气谱线数据的2-7列,b1、b2、b3、b4、b5、b6分别表示根据国际电信联盟颁布的全球平均参考大气数据中的水汽谱线数据的2-7列;
[0207]
n"d(f)是由气压造成的氮吸收以及德拜频谱产生的干空气连续吸收谱,计算公式如下:
[0208]
谱线强度为:
[0209]
对于氧气,si=a1×
10-7
pθ3exp[a2(1-θ)]
[0210]
对于水汽,si=b1×
10-1
eθ
3.5
exp[b2(1-θ)]
[0211]
其中,p为干空气气压,单位为hpa;e为水汽分压,单位为hpa(总气压,p
tol
=p e);θ=300/t;t是温度,单位为k,任何高度的水汽分压e可以通过该高度的水汽密度ρ和温度t计算得到,公式为:
[0212][0213]
谱线形状因子计算如下:
[0214][0215]
其中,fi是氧气或水汽谱线频率,δf是谱线宽度:
[0216]
对于氧气,
[0217]
对于水汽,
[0218]
修改谱线宽度δf,将氧气谱线的塞曼分裂和水汽谱线的多普勒展宽考虑在内:
[0219]
对于氧气,
[0220]
对于水汽,
[0221]
由于在氧气线中的干扰影响,δ是修正因子:
[0222]
对于氧气,δ=(a5 a6θ)
×
10-4
(p e)θ
0.8
[0223]
对于水汽,δ=0
[0224]
干空气连续带来自于10ghz以下的氧气的非共振德拜频谱以及100ghz以上的由气压造成的氮衰减:
[0225][0226]
其中,dn是德拜频谱的宽度参数:
[0227]dn
=5.6
×
10-4
(p e)θ
0.8
[0228]
进一步地,计算频率相关抑制,在频率共享研究中,频率相关抑制(fdr)是由接收机的信道选择性和发射机的无用发射决定的,可通过下式计算得出:
[0229][0230]
其中,φ(f)是干扰信号的功率谱密度,ψ(f)是接收机的归一化频率响应,δf2是频率偏移。保护频带可以通过频率偏移来计算得出:
[0231][0232]
其中,w
t
是发射机的信道带宽,wr是接收机的信道带宽;
[0233]
计算fdr用到了两种正交频分复用信号,分别是循环前缀正交频分复用(cp-ofdm)和加窗正交频分复用,通过接收机建模得出实际频率响应,根据信号的类型计算出fdr;在计算频响比时,该值可由发射信号的功率谱密度和接收机的频率响应决定,接收机的理想频率响应是整个接收信道带宽上的平坦响应,但在本发明中,为了实现接收机的实际频率响应,将其以下式建模:
[0234][0235]
其中,bb是阻带衰减,wf是平坦响应的带宽,w
t
是转换带宽;
[0236]
当副载波之间的正交性被破坏后,正交频分复用会引起符号间干扰和信道间干扰,为了解决这一问题,通过放置数据符号之间的保护间隔来执行循环前缀,这被称为循环前缀正交频分复用,其基带信号表示如下:
[0237][0238]
其中,n是子载波的数量,c
n,k
是在第n个正交频分复用符号的第k个子载波上调制的数据符号,p(t)是脉冲整形窗口,ts是数据符号的长度,tg是保护间隔。当每个子载波在统计上独立并相互正交时,应用任意脉冲整形窗口的正交频分复用干扰信号的功率谱密度可表示如下:
[0239][0240]
其中,ps是子载波的功率,p(f)是脉冲整形窗口的傅里叶变化,t
total
=ts tg是总符号持续时间,循环前缀正交频分复用子载波使用时域中的矩形脉冲整形窗口,表示如下:
[0241][0242]
该信号傅里叶变换表示如下:
[0243]
p
cp
(f)=t
total
·
sin c(t
total f)
[0244]
其中sin c(x)=sin(xπ)/xπ,计算得到循环前缀正交频分复用的功率谱密度,如下所示:
[0245][0246]
加窗正交频分复用是一种提高频谱效率的技术,因为它使用了比循环前缀频分复用中使用的矩形脉冲整形窗口更加平滑的窗口;对于加窗正交频分复用,在时域中使用升余弦函数的窗口,如下所示:
[0247][0248]
其中,t
tr
是过渡时间,t=t
total
t
tr
是窗口持续时间;加窗正交频分复用在过渡期间具有平滑的弯曲形状,傅里叶变换如下所示:
[0249][0250]
计算加窗正交频分复用的功率谱密度,如下所示:
[0251][0252]
基于正交频分复用波形的功率谱密度,计算频率相关抑制:
[0253][0254]
其中,发射信号的功率
[0255]
为确切计算相关干扰数值,依据国际电信联盟相关标准和建议书设置各参数:
[0256]
无人机系统的主要参数可根据itu-r的相关建议书确定,如下表所示:
[0257]
表1
[0258][0259]
用于干扰评估的互联车辆wlan的系统参数如下表2所示:
[0260]
表2
[0261][0262][0263]
计算频率相关抑制比时,受干扰互联车辆wlan接收器滤波器相关参数,如下表3所示:
[0264]
表3
[0265][0266]
无人机干扰信号的正交频分复用信号相关参数,如下表4所示:
[0267]
表4
[0268][0269][0270]
基于上述同频干扰表征方法和相关参数,可分析无人机以不同的仰角,在2.4ghz、零保护带宽、不同海拔高度下,对互联车辆wlan系统的干扰情况,计算不同高度下无人机与互联车辆wlan系统干扰路径的信噪比值。基于计算数值,可以得出:无人机的仰角越大,对ism频段的wlan系统的干扰水平越小,无人机与互联车辆wlan系统间产生同频干扰的概率越小;无人机与互联车辆wlan系统的分离高度越大,对ism频段的互联车辆wlan系统的干扰水平越小,无人机与互联车辆wlan系统间产生同频干扰的概率越小。当无人机与互联车辆wlan系统间分离高度为6.2km时,无人机仰角在各种情况下均能保证不对wlan系统产生同频干扰,可确定无人机与互联车辆wlan系统之间所需的保护高度约为:6.2km。
[0271]
本发明提供了一种无人机与互联车辆wlan系统的同频干扰表征方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。