技术特征:
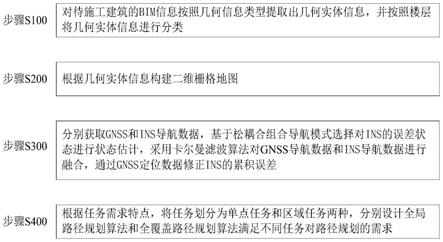
1.一种基于bim的机器人自主导航方法,其特征在于,包括:构建二维栅格地图:提取待施工建筑的bim信息中的几何实体信息,按照楼层对几何实体信息进行分类,并根据几何实体信息构建二维栅格地图;机器人定位:分别获取机器人的rtk-gnss和ins导航数据,基于松耦合组合导航模式选择对ins的误差状态进行状态估计得到融合算法模型,采用卡尔曼滤波算法用rtk-gnss导航数据修正ins导航数据的累积误差;规划机器人路径:根据任务需求特点,将任务划分为单点任务和区域任务两种,采用全局路径规划算法和全覆盖路径规划算法分别满足为单点任务和区域任务下机器人的路径规划。2.根据权利要求1所述的方法,其特征在于,融合算法模型包括姿态误差、速度误差、位置误差模型和惯性传感器误差模型;其中(1)姿态误差模型(1)姿态误差模型(1)姿态误差模型(1)姿态误差模型其中,l和h分别为机器人当前位置的维度和海拔高度,分别为导航坐标系下机器人的速度值,r
n
、r
e
分别为地球南北方向和东西方向的曲率半径,w
ie
为地球自转角速度在导航坐标系下的投影,为imu测量误差;(2)速度误差模型(2)速度误差模型(2)速度误差模型
其中,为imu获取比力值在导航坐标系下的投影,b
a,x
、b
a,y
分别为加速度计在x轴和y轴的零偏误差,ψ=[ψ
x ψ
y ψ
z
]
t
为平台失准角;(3)位置误差模型(3)位置误差模型其中l和λ分别代表机器人当前位置对应的纬度和经度;(4)惯性传感器误差模型(4)惯性传感器误差模型其中,b
a
、b
g
分别为加速度计和陀螺仪的零偏误差,τ
a
、w
ba
分别为加速度计零偏的相关时间和噪声项,τ
g
、w
bg
分别为陀螺仪计零偏的相关时间和噪声项。3.根据权利要求2所述的方法,其特征在于,采用卡尔曼滤波算法用rtk-gnss导航数据修正ins导航数据的累积误差的具体过程包括步骤s331,设机器人状态模型变量为:将式(1)~(10)代入式(11)得到状态方程和状态矩阵(12)将式(1)~(10)代入式(11)得到状态方程和状态矩阵(12)其中a为系统状态矩阵,w代表系统噪声,在实际计算中可以将过程协方差矩阵中的噪声项简化为高斯白噪声,
步骤s332,对上述连续时间的状态方程进行离散化,得到式(13)x
k
=φ
k-1
x
k-1
q
k-1
ꢀꢀꢀꢀꢀ
(13)其中,φ
k-1
=e
aδt
,h
k
=h,δt为采样周期,q
k-1
为过程噪声协方差矩阵;步骤s333,针对rtk-gnss定位数据的特点,选择rtk-gnss与ins的速度差值、位置差值作为测量模型中的观测量,构建测量模型;其中速度差值与状态变量满足以下关系:其中,和分别代表ins输出沿x方向的速度值和沿y方向的速度值,和分别代表rtk-gnss输出沿x方向的速度值和沿y方向的速度值,ξ
x
和ξ
y
分别表示rtk-gnss接收机在x方向和y方向上的测量误差;位置差值与状态变量之间满足以下关系:其中,l
i
和λ
i
分别代表ins输出纬度值和经度值,l
g
和λ
g
分别代表rtk-gnss输出纬度值和经度值,n
x
和n
y
分别表示rtk-gnss接收机在x方向和y方向上的测量误差,步骤s334,定义观测矩阵为:根据式(14)(15)得到测量模型中测量矩阵为4.根据权利要求1所述的方法,其特征在于,全局路径规划算法采用改进theta*算法实现单点任务下机器人路径规划,其中open表中堆顶元素始终是代价值最小的节点,其中代价值为当前节点与起始节点的欧拉距离加上当前节点与目标节点的欧拉距离之和;改进theta*算法具体包括:步骤s410,添加机器人的起始节点和结束节点;步骤s411,将初始状态加入open表中,转步骤s412;步骤s412,获取open表中堆顶节点作为当前节点;若当前节点为目标节点,输出节点信
息;若不为目标节点,转步骤s413;步骤s413,判断当前节点父节点与当前节点相邻节点的可见性;若相邻节点可见,转步骤s414;否则转步骤s415;步骤s414,将当前节点的相邻节点作为拓展节点,并将拓展节点的父节点调整为当前节点的父节点,同时从open堆中移除当前节点和新拓展节点,转步骤s416;步骤s415,拓展新状态,将不重复的新状态添加到open堆中,从open堆中移除当前节点,转步骤s416;步骤s416,输出结果;其中步骤s413当前节点父节点与相邻节点的可见性判断标准为:在当前节点中维护角度范围变量θ,若当前节点的父节点与当前节点的相邻节点形成直线与参考方向所成角度落在θ内,则该相邻节点相对于当前节点的父节点是可见的。5.根据权利要求4所述的方法,其特征在于,全覆盖路径规划算法实现区域任务下机器人路径规划的方法包括:步骤s401,初始化起始位置等相关参数,如果当前位置为起始位置,转步骤s402;否则通过改进theta*算法进行路径规划抵达起始位置后转步骤s402;步骤s402,通过改进bcd算法进行局部区域覆盖;步骤s403,将符合要求的栅格位置记录在回溯表中,当机器人移动到死点位置时,根据回溯点筛选规则对回溯表进行筛选,若筛选后回溯表不为空集,转步骤s404;若回溯表为空集,转步骤s406;步骤s404,筛选后的回溯表作为区域衔接目标点的候选集合,分别计算回溯点与当前位置点的欧拉距离,并选取欧拉距离最小的回溯点作为目标点;步骤s405,在选定区域衔接目标点之后,通过改进theta*算法进行路径规划抵达目标点,将目标点作为当前位置,转步骤s402;步骤s406,结束本次全覆盖过程。6.根据权利要求5所述的方法,其特征在于,步骤s402中的改进bcd算法中机器人包括8个移动方向,分别为正北、正南、正西、正东、东北、西北、西南、东南,且规定移动方向的优先级,优先级包括:优先级1:水平和垂直方向的优先级高于倾斜方向;优先级2:在优先级1相同的情况下,靠近起始点的方向优先级高于远离起始点的方向;优先级3:在优先级2相同的情况下,垂直方向的优先级高于水平方向,且正北高于正南,正东高于正西。7.根据权利要求6所述的方法,其特征在于,改进bcd算法具体过程包括:步骤s420,根据二维栅格地图,确定待工作区域的栅格地图并确定出发点;步骤s421,通过全局路径规划算法规划出当前位置到出发点所在位置的路径,并移动到出发位置;步骤s422,获取当前位置所有可移动方向,如果存在可移动方向则通过改进bcd算法优先级规则确定当前移动方向,若可移动,转步骤s423;否则,输出局部覆盖路径;步骤s423,沿着选定方向移动一个栅格并更新当前位置,转步骤s422。8.根据权利要求8所述的方法,其特征在于,步骤s403中的回溯表用于存储两个子区域
间衔接时选取的候选目标点,所述候选目标点是机器人所在位置相邻八个方向上非障碍物且机器人尚未抵达过的栅格位置,其中判断候选目标的过程包括:步骤s4311,假设待筛选回溯点位于a点,a点可移动的八个方向上的点分别为p1~p8,在这些点中能够与a点形成直线的一共有四对,分别是p1和p5、p2和p6、p3和p7、p4和p8;步骤s4312,定义状态描述函数d(p
i
,p
j
)用于反映与a点在同一直线上的相邻两点是否均为自由未覆盖栅格;若d(p
i
,p
j
)=1则说明与a点在同一直线上的相邻两点p
i
、p
j
均为自由未覆盖栅格,则可判定a点必然不是所在子区域的边缘点,进而可以将a点从回溯表中移除,转步骤s4313;步骤s4313,定义回溯点判断函数如下:d(a)=d(p1,p5) d(p2,p6) d(p3,p7) d(p4,p8)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(17)若d(a)≥1,则表示在a点与相邻位置形成的四条直线中,存在直线上a点相邻的两个位置点均为自由非覆盖栅格,那么a点必然不是边缘点,从回溯表中删除;若d(a)=0,则说明a点是边缘点,需要保留,在图8所示环境中,根据上述判定规则,自由黑色实心点标记的栅格位置才具有作为回溯点的条件,其他栅格位置均不需要维护在回溯表中。
技术总结
本发明的目的在于提供一种基于BIM的机器人自主导航方法,包括:构建二维栅格地图:提取待施工建筑的BIM信息中的几何实体信息,按照楼层对几何实体信息进行分类,并根据几何实体信息构建二维栅格地图;机器人定位:分别获取机器人的RTK-GNSS和INS导航数据,基于松耦合组合导航模式选择对INS的误差状态进行状态估计得到融合算法模型,采用卡尔曼滤波算法用RTK-GNSS导航数据修正INS导航数据的累积误差;规划机器人路径:根据任务需求特点,将任务划分为单点任务和区域任务两种,采用全局路径规划算法和全覆盖路径规划算法分别满足为单点任务和区域任务下机器人的路径规划。点任务和区域任务下机器人的路径规划。点任务和区域任务下机器人的路径规划。
技术研发人员:郭健 秦杰 高豪杰
受保护的技术使用者:南京理工大学
技术研发日:2021.12.16
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。