1.本发明属于无线定位技术领域,涉及的是一种基于机器学习的复杂环境下无线定位方法。
背景技术:
2.随着物联网技术的发展,人们的生产生活正朝着信息化、智能化、大数据化的方向推进。定位技术作为物联网中最重要的感知技术之一,在智能交通、资源勘探、地球观测等领域都有着广泛的应用。
3.目前主流的定位方式主要有卫星定位和无线定位,卫星定位依赖于视距(line of sight,los)环境下电磁波的直线传播,高楼等物体的遮挡会严重影响终端对卫星信号的接收,因此主要应用于较为空旷的室外环境当中;室内定位则主要依靠无线定位手段,通过测量无线电波的参数和使用特定的算法来解算终端的位置信息。
4.现有的无线定位技术主要有wi-fi定位、蓝牙定位、uwb(ultra-wide band,超宽带)定位、蜂窝无线定位、rfid(radio frequency identification,射频识别)定位、imu(inertial measurement unit,惯性测量单元)定位、视觉定位等技术;使用的无线定位算法主要为toa(time of arrival,到达时间)算法、tdoa(time difference of arrival,到达时间差)算法、aoa(angle of arrival,到达角度)算法、rss(received signal strength,接收信号强度)算法、指纹匹配算法等,或者采用多信号源和融合算法达到更高的定位精度。
5.然而,室内高精度定位因非视距(non line of sight,nlos)环境、电磁环境复杂、室内布局多变等技术障碍难以突破而成果寥寥,迄今为止尚无任何一种主导的高精度室内定位服务。几何定位精度高,但是容易受到nlos的影响;指纹定位精度略低,而且当环境布局或者电磁环境发生改变后精度将大大降低;基于惯性导航的航位推算定位有着不可避免的时间累积误差;基于视觉slam(simultaneous localization and mapping,即时定位与地图构建)定位易发生累计误差导致跟踪失败等。因此,单独使用任何一种技术都难以满足室内复杂环境的定位要求。定位系统的多源信息融合可以将不同子系统中的信息进行综合处理,规避单子系统的一些缺点。目前最常用的方法是将惯导与无线电定位方法进行融合实现在nlos环境下的连续定位,另外还可以将图像识别与其他定位方法进行融合。如何使每个多源子系统都能发挥自身的优势,增强整个系统的定位性能、容错能力以及自适应能力,已经成为多源信息融合定位方面需要解决的关键问题。
6.基于机器学习的室内定位技术最近几年刚刚开始引起关注,仍然面临着非常多的技术挑战,其中最大的问题是当样本集所在的环境电磁信号发生变化时,已经训练的算法无法进行相应的自动学习,从而导致定位误差出现较大偏离,甚至导致系统无法正常工作。为此,本发明提出了在非视距、复杂电磁环境下的高精度定位方法以及在室内布局多变环境下机器学习样本库的自动更新和自动训练方法,从而实现高精度、连续、稳定的室内无线定位。
技术实现要素:
7.由于任何单一的定位技术都有一定的局限性,均不能满足复杂环境下的高精度定位要求,本发明提出了一种基于机器学习的复杂环境下无线定位方法,以解决室内无线定位中由于非视距、电磁环境复杂、室内布局等导致的定位精度下降问题。
8.本发明的技术方案如下:
9.一种基于机器学习的复杂环境下无线定位方法,包括以下步骤:
10.1.采用4个定位模块对uwb信号、地磁信号、加速度信号、角速度信号和摄像头采集的图像信号进行处理,并完成定位结果的估测。其中,4个定位模块包括:
11.(1)los环境下基于uwb的几何定位模块
12.对uwb信号进行基于小波变换的模极大值滤波和基于峭度和偏度的非视距识别,若识别结果为los环境,则执行基于uwb的高精度几何定位,首先进行基于标准差迭代的无线测距,然后再进行tdoa几何定位;若识别结果为nlos环境,则进入基于深度学习的信号指纹定位模块。
13.(2)nlos环境下基于深度学习的指纹定位模块
14.采用中值滤波方法测量地磁信号强度,利用小波包分解构造uwb能量谱特征向量,将地磁信号样本和uwb能量谱特征向量输入到深度置信网络(deep boltzmann machine,dbn),进行特征指纹的训练,并计算输出的位置结果,完成对目标的位置估测。
15.(3)基于加速度和陀螺仪的航位推算(dead reckoning,dr)模块
16.通过加速度和陀螺仪采集加速度信号和角速度信号,得到单位采样周期内终端移动的转向角和距离,利用基于建立的数学模型进行航位推算,得出终端在下一时刻的坐标位置。
17.(4)基于视觉的同步定位与地图构建(visual simultaneous localization and mapping,vslam)模块
18.将加速度信号、角速度信号和摄像头采集的图像信号输入到vslam系统的前端视觉里程计进行处理,计算姿态变化,并进行回环检测和后端非线性优化,构建周围环境地图。
19.2.将上述4个定位模块的定位结果进行融合定位,包括:
20.(1)基于扩展卡尔曼滤波(extended kalman filter,ekf)的dr与vslam运动平滑
21.定位
22.对dr模块与vslam模块得到的定位数据进行基于ekf的平滑融合处理。
23.(2)基于粒子滤波将运动平滑定位与无线定位进行融合定位
24.在los环境下,将基于uwb的几何定位模块定位数据和基于扩展卡尔曼滤波的dr与vslam的运动平滑定位数据进行基于粒子滤波的融合定位,得到los环境下终端的最终定位结果;在nlos环境下,将基于深度学习的指纹定位模块定位数据和基于扩展卡尔曼滤波的dr与vslam的运动平滑定位数据进行基于粒子滤波的融合定位,得到nlos环境下终端的最终定位结果。
25.3.利用机器学习使样本自动更新和自动训练。
26.在los定位时,更新地磁指纹样本库:用基于中值滤波测量的地磁指纹和los环境下基于粒子滤波的位置指纹,基于隐式马尔科夫模型(hidden markov model,hmm)的流形
对齐法对样本库标注更新;在nlos定位时,更新uwb能量谱特征向量指纹样本库:使用基于深度学习置信网络进行指纹信号定位中的uwb信号能量谱特征向量和nlos环境下基于粒子滤波的位置指纹样本,基于hmm的流形对齐法对样本库进行标注更新;
27.基于los定位和nlos定位中更新后的两个样本库对dbn进行深度学习的训练,之后再用于基于深度学习的指纹信号定位。
附图说明
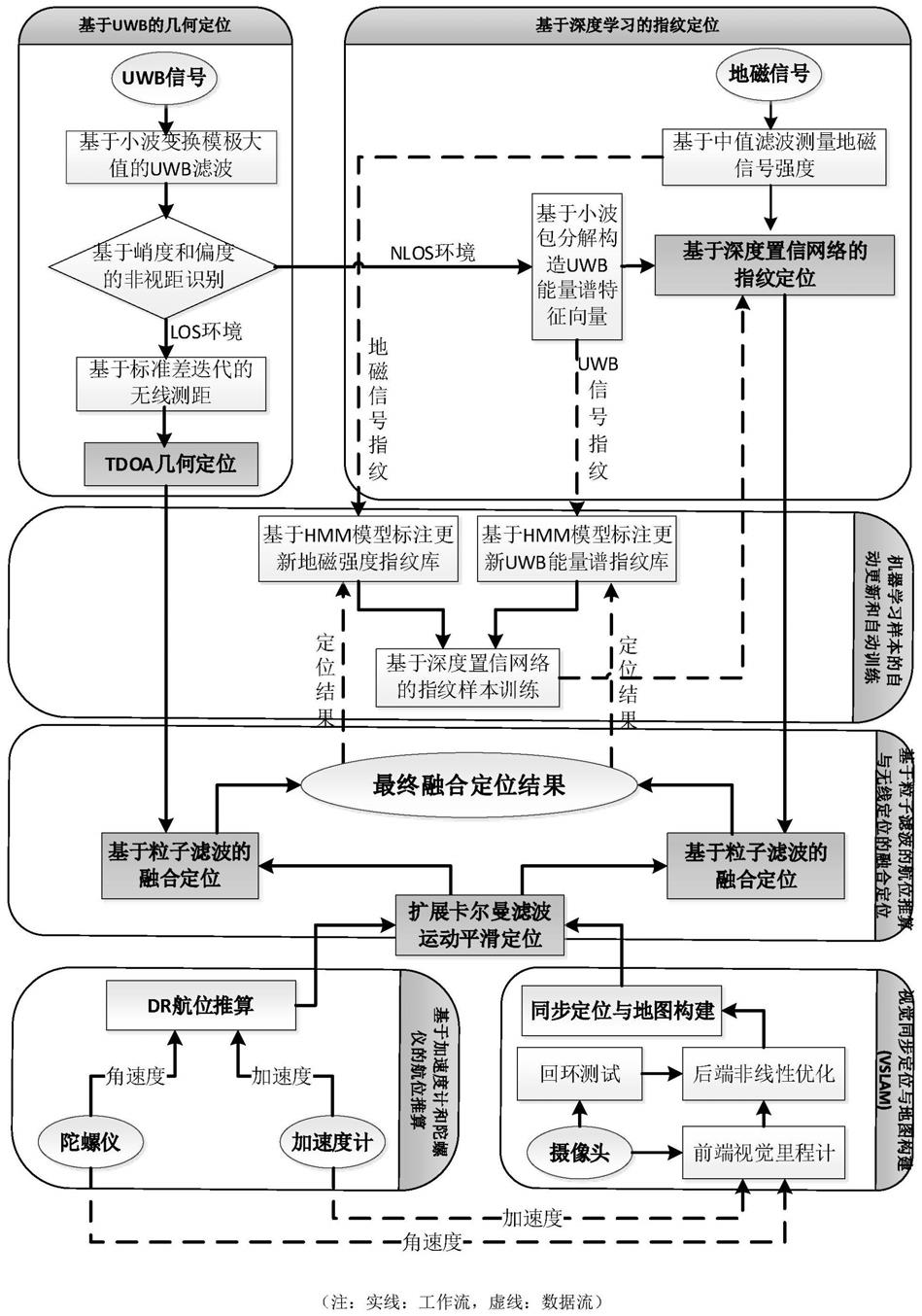
28.图1为基于机器学习的复杂环境下无线定位方法流程图。
具体实施方式
29.以下结合图例,对本发明进行详细说明。
30.如图1所示,本发明的主要步骤如下:
31.步骤1:加速度计获取加速度信号,陀螺仪获取角速度信号,从而得到单位采样周期内终端移动的转向角和距离,利用dr推算出其在下一时刻的坐标位置,得到dr定位结果;
32.步骤2:将加速度信号、角速度信号和摄像头采集的图像信号输入到vslam系统的前端视觉里程计进行处理,计算姿态变化,并进行回环检测和后端非线性优化,构建周围环境地图,从而得到vslam定位结果;
33.步骤3:将步骤1和步骤2得到的定位结果进行ekf平滑融合处理,通过泰勒分解线性化后可得到解析解,从而得到ekf融合结果;
34.步骤4:对带有噪声的uwb信号进行小波变化,再对各个尺度的模极大值进行处理,利用处理后的模极大值重构信号以去除噪声;
35.步骤5:利用基于峭度和偏度的非视距识别判断当前环境,若为los环境,则执行步骤6;若为nlos环境,则跳转到步骤7;
36.步骤6:对去噪后的uwb信号进行基于标准差迭代的无线测距,计算终端信号到多个基站的到达时间差实现uwb几何定位,然后跳转到步骤8;
37.步骤7:采用中值滤波方法测量地磁信号强度,利用小波包分解构造uwb能量谱特征向量,将地磁信号样本和uwb能量谱特征向量输入到dbn网络,进行特征指纹的训练,并计算输出的位置结果,得到dbn指纹定位结果,然后跳转到步骤9;
38.步骤8:对步骤3得到的ekf融合结果和步骤6得到的uwb几何定位结果进行粒子滤波融合,得到los环境下终端的最终定位结果,然后跳转到步骤10;
39.步骤9:对步骤3得到的ekf融合结果和步骤7得到的dbn指纹定位结果进行粒子滤波融合,得到nlos环境下终端的最终定位结果,然后跳转到步骤11;
40.步骤10:将步骤8得到的定位结果作为标签,基于中值滤波测量的地磁强度作为信号指纹,采用基于hmm的流形对齐法更新地磁指纹样本库,然后跳转到步骤12;
41.步骤11:将步骤9得到的定位结果作为标签,基于小波包分解得到的uwb能量谱特征向量作为信号指纹,采用基于hmm的流形对齐法更新uwb能量谱特征向量指纹样本库;
42.步骤12:基于步骤10和步骤11更新后的两个样本库,实现dbn的自动学习和自动更新。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。