技术特征:
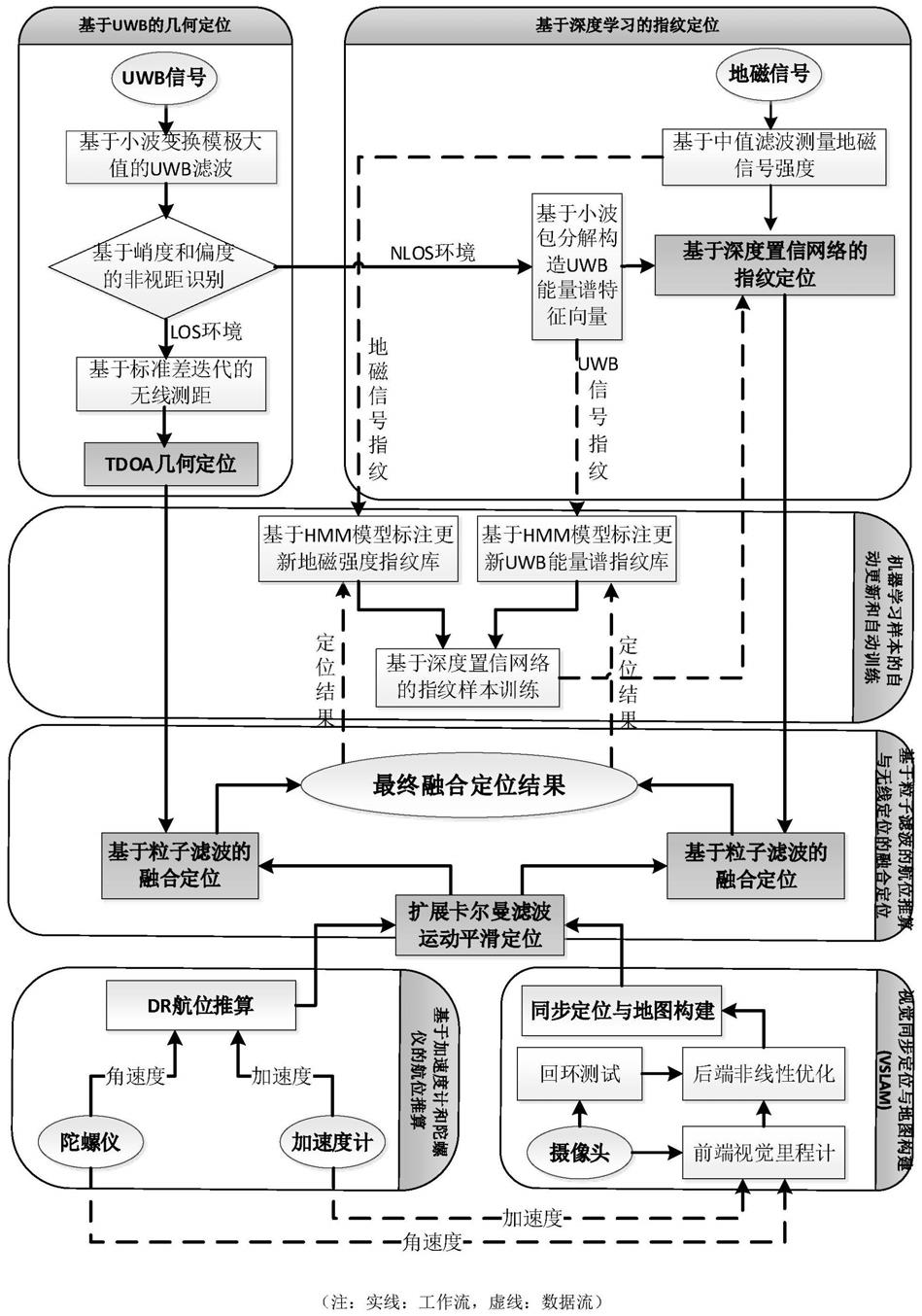
1.一种基于机器学习的复杂环境下无线定位方法,其特征在于,采用视距(line of sight,los)环境下基于uwb(ultra-wide band,超宽带)的几何定位模块、非视距(non line ofsight,nlos)环境下基于深度学习的指纹定位模块、基于加速度和陀螺仪的航位推算(deadreckoning,dr)模块和基于视觉的同步定位与地图构建(visual simultaneous localization andmapping,vslam)模块对终端进行多信号源融合定位,并通过机器学习实现样本的自动更新以及深度置信网络(deep boltzmann machine,dbn)的自动训练,具体步骤如下:步骤1:加速度计获取加速度信号,陀螺仪获取角速度信号,利用dr推算出其在下一时刻的坐标位置,得到dr定位结果;步骤2:将加速度信号、角速度信号和摄像头采集的图像信号输入到vslam系统的前端视觉里程计进行处理,计算姿态变化,并进行回环检测和后端非线性优化,构建周围环境地图,从而得到vslam定位结果;步骤3:将步骤1和步骤2得到的定位结果进行ekf(extended kalman filter,扩展卡尔曼滤波)平滑融合处理,从而得到ekf融合结果;步骤4:对带有噪声的uwb信号进行小波变化,再对各个尺度的模极大值进行处理,利用处理后的模极大值重构信号以去除噪声;步骤5:利用基于峭度和偏度的非视距识别判断当前环境,若为los环境,则执行步骤6;若为nlos环境,则跳转到步骤7;步骤6:对去噪后的uwb信号进行基于标准差迭代的无线测距,计算终端信号到多个基站的到达时间差实现uwb几何定位,然后跳转到步骤8;步骤7:采用中值滤波方法测量地磁信号强度,利用小波包分解构造uwb能量谱特征向量,将地磁信号样本和uwb能量谱特征向量输入到dbn网络,进行特征指纹的训练,并计算输出的位置结果,得到dbn指纹定位结果,然后跳转到步骤9;步骤8:对步骤3得到的ekf融合结果和步骤6得到的uwb几何定位结果进行粒子滤波融合,得到los环境下终端的最终定位结果,然后跳转到步骤10;步骤9:对步骤3得到的ekf融合结果和步骤7得到的dbn指纹定位结果进行粒子滤波融合,得到nlos环境下终端的最终定位结果,然后跳转到步骤11;步骤10:将步骤8得到的定位结果作为标签,基于中值滤波测量的地磁强度作为信号指纹,采用基于hmm(hidden markov model,隐式马尔科夫模型)的流形对齐法更新地磁指纹样本库,然后跳转到步骤12;步骤11:将步骤9得到的定位结果作为标签,基于小波包分解得到的uwb能量谱特征向量作为信号指纹,采用基于hmm的流形对齐法更新uwb能量谱特征向量指纹样本库;步骤12:基于步骤10和步骤11更新后的两个样本库,实现dbn的自动学习和自动更新。
技术总结
本发明属于无线定位技术领域,涉及的是一种基于机器学习的复杂环境下无线定位方法。主要步骤是采用视距(Line of Sight,LOS)环境下基于UWB(Ultra-Wide Band,超宽带)的几何定位模块、非视距(Non Line of Sight,NLOS)环境下基于深度学习的指纹定位模块、基于加速度和陀螺仪的航位推算(Dead Reckoning,DR)模块和基于视觉的同步定位与地图构建(Visual Simultaneous Localization and Mapping,VSLAM)模块对终端进行多信号源定位,同时利用基于粒子滤波和扩展卡尔曼滤波对无线定位结果进行融合平滑处理,通过机器学习实现样本的自动更新以及深度置信网络(Deep Boltzmann Machine,DBN)的自动训练,以适应室内布局多变的空间和电磁环境。本发明可以适应复杂的室内环境,为终端提供高精度、连续、稳定的无线定位服务。服务。
技术研发人员:李娟 崔学荣 及美琪 毛欣伟 张敬瑶
受保护的技术使用者:中国石油大学(华东)
技术研发日:2021.10.29
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。