1.本发明涉及伸缩缝大模板技术领域,具体为一种伸缩缝大模板伸缩装置施工工艺。
背景技术:
2.传统常用模板安装做法为放置木盒或泡沫板,模板无法拆除周转,材料浪费大,经济性差;且混凝土浇筑过程中模板如有移位偏差无法调整,影响混凝土成型效果,且泡沫板为弹性易碎材料,填充此宽度伸缩缝需要多块叠加,其弹性模量无法控制,容易造成墙底部压力较大处比上部墙厚,截面尺寸不一致,甚至爆模,造成混凝土超方量,或振捣时损坏泡沫板造成墙体夹渣等。
技术实现要素:
3.本发明的目的在于提供一种伸缩缝大模板伸缩装置施工工艺,以解决上述背景技术中提出的问题。
4.为实现上述目的,发明提供如下技术方案:一种伸缩缝大模板伸缩装置施工工艺,具体包括以下步骤:
5.步骤一:模板系统设计:
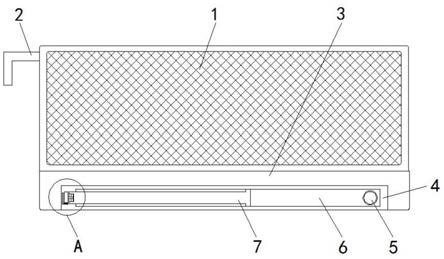
6.首先,选取规格为长*宽*厚=2700mm*500mm*65mm的铝模板,横向背楞选用60mm*60mm*3mm的方管,竖向背楞选用40mm*40mm*3mm的方管,横竖方向背楞一边齐平并牢固焊接,在横向背楞上开设用于安装伸缩单元的螺栓孔,孔径为φ12mm,并在背楞上焊接吊耳;然后,选用φ18mm的对拉螺杆,底层第二排横向背楞加长140~160mm预留用于微调安装;最后,最外侧竖向背楞每边最少预留两组无动力伸缩单元;
7.步骤二:伸缩系统设计:
8.首先,伸缩系统由多组伸缩单元通过串联或并联组成,每个伸缩单元由一组左支撑臂、一组右支撑臂、螺杆、正反丝螺母、传动轴组成,然后,其中的左右支撑臂由40mm*40mm*3mm方管加工而成,每个伸缩单元由四个完全一样的支撑臂组装成一个伸缩单元,最后用φ25mm钢筋将每个伸缩单元串联起来;
9.步骤三:转动系统设计:
10.首先,在转动轴一端往内50mm处焊接一个链轮,共焊接8组,其中中间四组在已焊接好的链轮外侧再焊接一个链轮,两链轮之间留设10mm间隙,链轮与转动轴保持同心,并在其中一条传动轴两端各焊接一个六角螺母,手摇柄采用钢筋制作,端头焊接内六角套筒,最后,调整链条长度以保证设计转动轴间距并略微张紧为宜;
11.步骤四:微调系统设计:
12.微调系统采用40mm*40mm*3mm方管制作,其中竖向螺杆支座采用两根40mm*40mm*3mm方管并列焊接,水平方向螺杆支座采用一根40mm*40mm*3mm方管与竖向方管焊接成一整体;
13.步骤五:首先,将一侧模板背楞放置稳定,将一根串联好的转动轴上的伸缩单元放进横向背楞缝隙内,移转转动轴,使每个伸缩单元上的销轴孔与横向背楞上的圆孔重合,再穿入销轴,将销轴与横向背楞焊接固定,圆销采用φ20mm圆钢制成,长度略大于每组横向背楞外皮尺寸;然后,同理安装剩余转动轴,带手摇柄的转动轴安装在中间靠下位置;接着安装无动力伸缩单元;接着将另一侧模板背楞靠近已安装伸缩转动系统的背楞处,移动该背楞使其横向背楞销轴孔与伸缩系统销轴孔对应,依次穿入销轴并临时固定;接着调节中间伸缩转动轴,套上链条,穿限位固定;接着对微调系统进行安装,将微调系统依次焊接于模板背楞两端,安装位置不与链轮及链条碰撞;接着在背楞顶部焊接吊耳;最后进行装置调试,在平整坚实的地面弹墙身线,搭设临时支架配合倒链模拟塔吊吊装该装置,使装置基本上位于墙身线位置上方并离地约4~6cm,转动手摇柄使装置张开至略小于伸缩缝尺寸,在通过转动竖向和水平方向微调系统丝杆,使装置达到预定位置,模拟安装穿墙螺杆,最后再转动手摇柄使装置张开至预期宽度,直至调试至该装置开合流畅为止,再将模板安装固定于背楞上。
14.优选的,步骤一中竖向背楞设置间距满足与横向背楞焊接后的刚度要求,并使受力均匀分散,竖向背楞避开设置的螺栓孔。
15.优选的,步骤三中还设置有手摇柄,其中的手摇柄采用φ25mm钢筋制成,并且端头焊接内六角套筒。
16.优选的,还包括装置高度的控制:现场安装该装置位置为伸缩缝处,伸缩缝宽度为350mm,调节装置高度时需要再微调系统竖向丝杆下横跨伸缩缝上垫放若干个方木或钢槽,使竖向丝杆生根稳固。
17.优选的,还包括装置安装的控制:检查并清理该装置与下层结构搭接部分有无凸出墙面的石子,同时为防止伸缩缝两侧剪力墙钢筋影响该装置安装,先吊装提升该装置至上一结构层并临时固定,再绑扎剪力墙钢筋、安装内墙面模板,再调节装置使穿墙螺杆能自由贯通伸缩缝两侧剪力墙四面模板,安装到位后取下手摇柄,并设置专人检查。
18.优选的,还包括装置日常维护的控制:检查丝杆上废机油消耗情况,并及时补刷,检查装置伸缩转动系统上有无粘结混凝土浆及木屑,及时清理,装置安装到位后及时用模板盖在顶部,以防止杂物掉进。
19.与现有技术相比,发明的有益效果是:
20.1、该伸缩缝大模板伸缩装置施工工艺,设置多组伸缩单元同步进行伸张或收缩,带动与之连接的模板背楞一起伸缩来控制模板的开合尺寸,实现伸缩缝大模板的伸缩调节。
21.2、该伸缩缝大模板伸缩装置施工工艺,每组伸缩单元的原理为基于等腰三角形的两个腰部长度不变,通过伸长或缩短底边的长度来改变顶点距底边长度的几何原理,通过螺杆和螺母之间配合螺旋传动来调节两侧两个等腰三角形底边长度来实现整个伸缩单元伸张和收缩尺寸。
22.3、该伸缩缝大模板伸缩装置施工工艺,针对伸缩缝传统模板的受力分析,及与剪力墙内侧面铝模板配合工作通用性分析,在模板设计对拉杆处各设置一组伸缩单元,采用多组伸缩单元串、并联的方式与模板背楞铰接成整体,进而来实现单元间伸缩缝等特殊部位的模板支模。
具体实施方式
23.下面将结合本发明实施例中,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.本发明提供一种技术方案:一种伸缩缝大模板伸缩装置施工工艺,具体包括以下步骤:
25.步骤一:模板系统设计:
26.首先,选取规格为长*宽*厚=2700mm*500mm*65mm的铝模板,横向背楞选用60mm*60mm*3mm的方管,竖向背楞选用40mm*40mm*3mm的方管,横竖方向背楞一边齐平并牢固焊接,在横向背楞上开设用于安装伸缩单元的螺栓孔,孔径为φ12mm,并在背楞上焊接吊耳;然后,选用φ18mm的对拉螺杆,底层第二排横向背楞加长140~160mm预留用于微调安装;最后,最外侧竖向背楞每边最少预留两组无动力伸缩单元;
27.步骤二:伸缩系统设计:
28.首先,伸缩系统由多组伸缩单元通过串联或并联组成,每个伸缩单元由一组左支撑臂、一组右支撑臂、螺杆、正反丝螺母、传动轴组成,然后,其中的左右支撑臂由40mm*40mm*3mm方管加工而成,每个伸缩单元由四个完全一样的支撑臂组装成一个伸缩单元,最后用φ25mm钢筋将每个伸缩单元串联起来;
29.步骤三:转动系统设计:
30.首先,在转动轴一端往内50mm处焊接一个链轮,共焊接8组,其中中间四组在已焊接好的链轮外侧再焊接一个链轮,两链轮之间留设10mm间隙,链轮与转动轴保持同心,并在其中一条传动轴两端各焊接一个六角螺母,手摇柄采用钢筋制作,端头焊接内六角套筒,最后,调整链条长度以保证设计转动轴间距并略微张紧为宜;
31.步骤四:微调系统设计:
32.微调系统采用40mm*40mm*3mm方管制作,其中竖向螺杆支座采用两根40mm*40mm*3mm方管并列焊接,水平方向螺杆支座采用一根40mm*40mm*3mm方管与竖向方管焊接成一整体;
33.步骤五:首先,将一侧模板背楞放置稳定,将一根串联好的转动轴上的伸缩单元放进横向背楞缝隙内,移转转动轴,使每个伸缩单元上的销轴孔与横向背楞上的圆孔重合,再穿入销轴,将销轴与横向背楞焊接固定,圆销采用φ20mm圆钢制成,长度略大于每组横向背楞外皮尺寸;然后,同理安装剩余转动轴,带手摇柄的转动轴安装在中间靠下位置;接着安装无动力伸缩单元;接着将另一侧模板背楞靠近已安装伸缩转动系统的背楞处,移动该背楞使其横向背楞销轴孔与伸缩系统销轴孔对应,依次穿入销轴并临时固定;接着调节中间伸缩转动轴,套上链条,穿限位固定;接着对微调系统进行安装,将微调系统依次焊接于模板背楞两端,安装位置不与链轮及链条碰撞;接着在背楞顶部焊接吊耳;最后进行装置调试,在平整坚实的地面弹墙身线,搭设临时支架配合倒链模拟塔吊吊装该装置,使装置基本上位于墙身线位置上方并离地约4~6cm,转动手摇柄使装置张开至略小于伸缩缝尺寸,在通过转动竖向和水平方向微调系统丝杆,使装置达到预定位置,模拟安装穿墙螺杆,最后再转动手摇柄使装置张开至预期宽度,直至调试至该装置开合流畅为止,再将模板安装固定
于背楞上。
34.本实施例中,步骤一中竖向背楞设置间距满足与横向背楞焊接后的刚度要求,并使受力均匀分散,竖向背楞避开设置的螺栓孔。
35.本实施例中,步骤三中还设置有手摇柄,其中的手摇柄采用φ25mm钢筋制成,并且端头焊接内六角套筒。
36.本实施例中,还包括装置高度的控制:现场安装该装置位置为伸缩缝处,伸缩缝宽度为350mm,调节装置高度时需要再微调系统竖向丝杆下横跨伸缩缝上垫放若干个方木或钢槽,使竖向丝杆生根稳固。
37.本实施例中,还包括装置安装的控制:检查并清理该装置与下层结构搭接部分有无凸出墙面的石子,同时为防止伸缩缝两侧剪力墙钢筋影响该装置安装,先吊装提升该装置至上一结构层并临时固定,再绑扎剪力墙钢筋、安装内墙面模板,再调节装置使穿墙螺杆能自由贯通伸缩缝两侧剪力墙四面模板,安装到位后取下手摇柄,并设置专人检查。
38.本实施例中,还包括装置日常维护的控制:检查丝杆上废机油消耗情况,并及时补刷,检查装置伸缩转动系统上有无粘结混凝土浆及木屑,及时清理,装置安装到位后及时用模板盖在顶部,以防止杂物掉进。
39.技术效果:该伸缩缝大模板伸缩装置施工工艺,设置多组伸缩单元同步进行伸张或收缩,带动与之连接的模板背楞一起伸缩来控制模板的开合尺寸,实现伸缩缝大模板的伸缩调节。该伸缩缝大模板伸缩装置施工工艺,每组伸缩单元的原理为基于等腰三角形的两个腰部长度不变,通过伸长或缩短底边的长度来改变顶点距底边长度的几何原理,通过螺杆和螺母之间配合螺旋传动来调节两侧两个等腰三角形底边长度来实现整个伸缩单元伸张和收缩尺寸。该伸缩缝大模板伸缩装置施工工艺,针对伸缩缝传统模板的受力分析,及与剪力墙内侧面铝模板配合工作通用性分析,在模板设计对拉杆处各设置一组伸缩单元,采用多组伸缩单元串、并联的方式与模板背楞铰接成整体,进而来实现单元间伸缩缝等特殊部位的模板支模。
40.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。