1.本实用新型涉及机器人的供电控制,尤其涉及一种伺服电机的供电控制装置。
背景技术:
2.随着机器人的不断普及,对于其工作的稳定性和连续性及运行精度有了更高的要求,特别是有些机器人需要在不同地点工作,经常需要关机后移动到比较远的地方工作,比如搜救机器人,服务机器人。这些机器人在不工作时对于之前工作的各项信息,尤其是伺服电机的位置信息都需要储存在内部。一旦进入工作状态,各项运动机构将迅速调整到工作位置,而不需要重新标定伺服电机。
3.市面上虽然有能保存住伺服电机圈数信息的机器人,但有两个问题没有克服:一是这种机器人的圈数数据一圈只有一个,精度不高;二是内置的电池不能充电,一旦电量耗尽将无法正常工作。特别是有些机器人担任着特殊任务,工作一次后将长时间不处于工作状态。在此状态下需要保存关机之前的各项信息及断电后的姿态变化,在下次工作开始时,能快速进入工作状态。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术中存在的不足,提供一种伺服电机的供电控制装置,延长机器人伺服电机的待机时间,使内置数据在更长的时间内得以保证其完整性。
5.本实用新型是通过以下技术方案予以实现:
6.一种伺服电机的供电控制装置,包括:
7.电源端子,连接用于为伺服电机供电的电源;
8.电池端子,连接用于为伺服电机充电的电池;
9.输出端子,连接伺服电机;
10.第一检测单元,检测电源端子并输出电源电压信号;
11.控制单元,接收电源电压信号以控制切换单元的连接方式;
12.切换单元,使伺服电机连通电源或电池。
13.根据上述技术方案,优选地,包括多个输出端子。
14.根据上述技术方案,优选地,控制单元设有定时器,控制单元控制切换单元连通伺服电机和电池后启动定时器,定时器定时连通或断开电池。
15.根据上述技术方案,优选地,还包括按键单元;
16.按键单元根据手动操作轮流输出第一触发信号和第二触发信号;
17.切换单元连通伺服电机和电池后,控制单元接收安检单元输出的信号:
18.控制单元接收第一触发信号后短接定时器,直接连通电池和伺服电机;
19.控制单元接收第二触发信号后启动定时器。
20.根据上述技术方案,优选地,还包括第二检测单元、升压单元和降压单元,第二检
测单元检测电池端子并输出电池电压信号,控制单元接收电池电压信号后使电池接入升压单元或降压单元以适配伺服电机的电压。
21.本实用新型的有益效果是:
22.本装置能够时实监测识别机器人的伺服电机是否通过外部电源供电,并根据供电状况切换是否接入电池进行充电。
23.本装置具有一路输入、多路输出功能,通过板载分流插座对输入电路进行分配,能减少排在前面的电机流过电流的压力,提升机器人的整体性能和稳定性。
24.本产品可以自动控制或手动控制,当没有人为干预的情况下,本产品将运行于自动状态,自动识别供电状态及定时充电等待时间。一旦按下手动充电按钮,本产品将开始对机器人进行充电,如果此时再次按下按钮,将结束充电,如果不按按钮,在充电定时时间到了,将自动结束充电,并进入自动控制模式。
附图说明
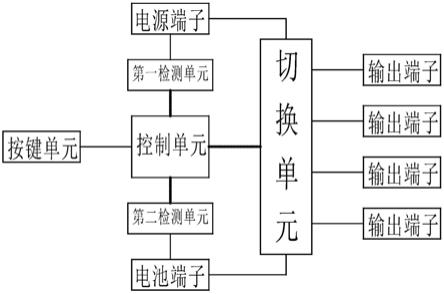
25.图1示出了本实用新型的实施例的模块连接框图。
26.图2示出了本实用新型的实施例的功能框图。
27.图3示出了本实用新型的实施例的单片机电路图。
28.图4示出了本实用新型的实施例的切换单元电路图。
29.图5示出了本实用新型的实施例的第一接线端子图。
30.图6示出了本实用新型的实施例的第二接线端子图。
31.图7示出了本实用新型的实施例的检测部分电路图。
32.图8示出了本实用新型的实施例的按键单元与状态显示电路图。
33.图9示出了本实用新型的实施例的升压单元图。
34.图10示出了本实用新型的实施例的降压单元图。
具体实施方式
35.为了使本技术领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和最佳实施例对本实用新型作进一步的详细说明。
36.实施例一
37.本实用新型一种伺服电机的供电控制装置,包括:电源端子,连接用于为伺服电机供电的电源;电池端子,连接用于为伺服电机充电的电池;输出端子,连接伺服电机;第一检测单元,检测电源端子并输出电源电压信号;控制单元,接收电源电压信号以控制切换单元的连接方式;切换单元,使伺服电机连通电源或电池。
38.当第一检测单元检测到电源端子具有电源电压信号时,控制单元会控制切换单元连通电源端子和输出端子,使外部电源为伺服电机正常供电。此时机器人通过外部电源供电,处于开机正常工作状态。
39.当第一检测单元检测到电源端子没有电源电压信号时,控制单元会控制切换单元连通电池端子和输出端子,通过电池为伺服电机充电。此时机器人没有连接外部电源,处于断电关机状态,电池为伺服电机充电,延长机器人伺服电机的待机时间,使内置数据在更长的时间内得以保证其完整性。
40.实施例二
41.根据上述实施例,优选地,包括多个输出端子。多个输出端子分别连接不同的伺服电机,使本供电控制装置可以同时为多个伺服电机充电。现有技术通常采用电池与多个伺服电机串联的方式充电,使与电池连接最近的伺服电机受到电流过大。而本装置并联多个伺服电机,避免了上述问题,提升机器人的整体性能和稳定性。
42.实施例三
43.根据上述实施例,优选地,控制单元设有定时器,控制单元控制切换单元连通伺服电机和电池后启动定时器,定时器定时连通或断开电池。当机器人断电关机时,如果电池与伺服电机长时间连接,将带来安全隐患。因此通过定时器,定时启动或关闭电池充电,使本装置进入定时充电状态。
44.根据上述实施例,优选地,还包括按键单元;按键单元根据手动操作轮流输出第一触发信号和第二触发信号;切换单元连通伺服电机和电池后,控制单元接收安检单元输出的信号:控制单元接收第一触发信号后短接定时器,直接连通电池和伺服电机;控制单元接收第二触发信号后启动定时器。
45.本装置可以通过按键单元,手动控制启动充电或停止充电。机器人断电停机后,操作者第一次触发按键单元,输出第一触发信号,短接定时器,直接连通电池和伺服电机,使电池为伺服电机充电。操作者第二次触发按键单元,输出第二触发信号,恢复接入定时器,本装置回到定时充电状态。
46.实施例四
47.根据上述实施例,优选地,还包括第二检测单元、升压单元和降压单元,第二检测单元检测电池端子并输出电池电压信号,控制单元接收电池电压信号后使电池接入升压单元或降压单元以适配伺服电机的电压。
48.图3-10示出了一种本技术方案的具体实施例。
49.图3采用单片机作为控制单元,用于协调各部电路有序工作。
50.图5中p1,p2,p3,p4为向伺服电机供电的输出端子。con 1,con 2,con 3,con 4为can总线向伺服电机输出的扩展端子。con 7为机器人主控向本装置输入的can总线端子。con 8为电池端子。
51.图6中p5为电源端子,ec1-ec14为滤波电容,con5为另一路的电池端子。
52.图7中vbus_s为第一检测单元,用于检测电源的电压。bat-bus_s为第二检测单元,用于检测电池电压。p6用于机器人主控或外部控制器与本装置的通信接口。
53.图8中key1为按键单元,用于手动控制充电。led1和led2用于显示本装置的状态。
54.本实用新型的有益效果是:
55.本装置能够时实监测识别机器人的伺服电机是否通过外部电源供电,并根据供电状况切换是否接入电池进行充电。
56.本装置具有一路输入、多路输出功能,通过板载分流插座对输入电路进行分配,能减少排在前面的电机流过电流的压力,提升机器人的整体性能和稳定性。
57.本产品可以自动控制或手动控制,当没有人为干预的情况下,本产品将运行于自动状态,自动识别供电状态及定时充电等待时间。一旦按下手动充电按钮,本产品将开始对机器人进行充电,如果此时再次按下按钮,将结束充电,如果不按按钮,在充电定时时间到
了,将自动结束充电,并进入自动控制模式。
58.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
