1.本技术涉及外骨骼技术领域,特别是外骨骼髋膝关节刚柔混合的运动控制方法。
背景技术:
2.在机动助力型外骨骼作为机电一体化设备,主要目的为下肢失能人群重新行走或具备正常运动能力的人群行走助力,外骨骼的控制策略一直在被广泛的关注、研究和拓展。
3.康复类型的外骨骼控制策略由于应对对象为运动失能患者,基本缺失运动能力,运动意图识别和运动控制仅通过外部有限的运动触发机制和既定的轨迹规划。经文献检索,在cn 101933874a中垂直站立下肢康复系统,该设备在起立床的基础上加入下肢踏步功能,该康复机器人提供的行走模式有限且不可进行实时在线控制,忽略了患者的自主运动意识。cn 201610656352和cn 104606030中融合自主运动意识的下肢在线行走康复系统及方法,但通过脑电或者肌电信号获取运动意图识别或进行轨迹规划的方式较为困难,且特异性较强,不同的穿戴者差异较大。
4.助力型外骨骼的应用对象为健康人群,具有自主的运动意识,下肢外骨骼需要感知其自主运动意识,并执行对应的运动控制策略。bllex外骨骼采用了灵敏度放大控制策略控制液压驱动下肢助力外骨骼,力矩主要作用于外骨骼关节力矩输出,用于增加用户的承载能力。但灵敏度控制是一种开环控制方法,对通过参数辨识的动力学模型较为依赖,不合适的辨识模型误差会在系统的输出造成剧烈的变化,10%的系统模型误差会导致系统输出变动量占据理想输出的90%。同时控制器也会放大外部干扰力,系统将变得不稳定。基于模型的控制结构下,所需的机器人动作是基于人-外骨骼模型计算的,通常考虑了重力补偿、零力矩点(zmp)平衡准则,并提供额外的指令辅助。而这种控制策略依赖于模型的准确性和穿戴的传感器数据提供的信息丰富度、数据的稳定性,这需要不同类型传感器来感知运动学和动力学变量。以表面肌电信号与运动学信息融合的外骨骼控制策略为例,长期的穿戴导致的皮肤汗液或脱落会导致肌电传感数据异常。
5.综上所述,外骨骼控制策略中意图感知和精确控制需要进一步改进。
技术实现要素:
6.本技术实施例提供了一种刚柔混合的外骨骼运动控制方法、装置和系统,以至少解决现有的外骨骼控制策略意图感知和精确控制较差的问题。
7.根据本技术的一个方面,提供一种刚柔混合的外骨骼运动控制方法,通过实时足部角度和上一个运动状态并结合运动状态转换图识别抬腿相位、落腿相位和摆动相位,并提供对应的髋关节控制和膝关节控制;其中在抬腿相位时,髋关节控制提供助力,膝关节控制保持松弛;在落腿相位时,髋关节控制提供助力,膝关节控制保持张紧力最大;所述抬腿相位为从支撑相到足部完全离地之前,所述落腿相位为从足部自摆动相着地起到完全站立状态;在摆动相位时,髋关节控制为随动,膝关节控制保持不变。
8.进一步的,在本发明中,所述落腿相位时,髋关节处的人机交互力如下:
9.f
lh
=kp(θ
aim-θ
now
)
10.θ
aim
为髋关节的目标角度,θ
now
为肢髋关节的实际运动角度,kp为比例增益系数。
11.进一步的,在本发明中,采用基于人机交互力的pd控制策略实现髋关节控制,所述基于人机交互力的pd控制策略控制的输出力矩如下:
12.τ=kp(f
r-fb) kd(f
r-fb)
13.kp为比例增益系数,kd为微分增益系数,fr为人机交互力传感器,fb为传感数据的目标值。
14.进一步的,在本发明中,所述通过实时足部角度和上一个运动状态并结合运动状态转换图,识别出当前运动状态的方法为:
15.当上一个状态为站立,且足部角度的斜率超过正向阈值,则状态切换为抬脚,否则状态保持为站立;
16.当上一个状态为抬脚,若足部角度的斜率低于负向阈值,则状态切换为落脚,若足部角度斜率小于正向阈值且大于负向阈值,则状态切换为悬空;否则,状态保持为抬脚;
17.当上一个状态为悬空,若足部角度的斜率低于负向阈值,则状态切换为落脚;否则,状态保持为悬空;
18.当上一个状态为落脚,若足部角度为既定阈值,则状态切换为站立;否则,状态保持为落脚。
19.根据本技术的第二个方面,提供一种刚柔混合的外骨骼运动控制装置,包括:
20.相位识别模块,用于通过实时足部角度和上一个运动状态并结合运动状态转换图识别抬腿相位、落腿相位和摆动相位;
21.关节控制模块,用于提供对应的髋关节控制和膝关节控制;其中在抬腿相位时,髋关节控制提供助力,膝关节控制保持松弛;在落腿相位时,髋关节控制提供助力,膝关节控制保持张紧力最大;所述抬腿相位为从支撑相到足部完全离地之前,所述落腿相位为从足部自摆动相着地起到完全站立状态;在摆动相位时,髋关节控制为随动,膝关节控制保持不变。
22.进一步的,在本发明中,所述关节控制模块还用于,所述落腿相位时,髋关节处的人机交互力如下:
23.f
lh
=kp(θ
aim-θ
now
)
24.θ
aim
为髋关节的目标角度,θ
now
为肢髋关节的实际运动角度,kp为比例增益系数。
25.进一步的,在本发明中,所述关节控制模块还用于,采用基于人机交互力的pd控制策略实现髋关节控制,所述基于人机交互力的pd控制策略控制的输出力矩如下:
26.τ=kp(f
r-fb) kd(f
r-fb)
27.kp为比例增益系数,kd为微分增益系数,fr为人机交互力传感器,fb为传感数据的目标值。
28.根据本技术的第三个方面,提供一种刚柔混合的外骨骼运动控制系统,包括外骨骼硬件和软件,所述软件用于执行本技术第一个方面所述的方法。
29.有益效果:
30.本发明提供的一种刚柔混合的外骨骼运动控制方法,通过实时足部角度和上一个运动状态并结合运动状态转换图识别抬腿相位、落腿相位和摆动相位,并提供对应的髋关
节控制和膝关节控制;其中在抬腿相位时,髋关节控制提供助力,膝关节控制保持松弛;在落腿相位时,髋关节控制提供助力,膝关节控制保持张紧力最大;所述抬腿相位为从支撑相到足部完全离地之前,所述落腿相位为从足部自摆动相着地起到完全站立状态;在摆动相位时,髋关节控制为随动,膝关节控制保持不变。上述方法能够通过较少的传感器实现对状态的识别,并更合理的控制力的输出,控制较为精确,使得外骨骼装置的协同效果好。
附图说明
31.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
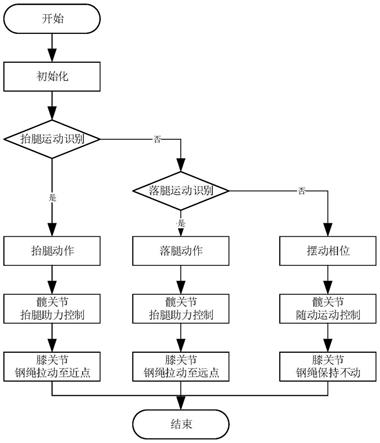
32.图1是根据本技术实施例的流程示意图;
33.图2是根据本技术实施例的足部运动状态示意图;
34.图3是根据本技术实施例的膝关节结构示意图;
35.图4是根据本技术实施例的足底结构示意图;
36.图5是根据本技术实施例的运动状态转换机制示意图;
37.图6是根据本技术实施例的足部原始数据;
38.图7是根据本技术实施例的公式1处理后的足部角度数据;
39.图8是根据本技术实施例的公式2处理后的足部角度数据;
40.图9是根据本技术实施例的抬脚状态感知识别图;
41.图10是根据本技术实施例的落脚状态感知识别图;
42.图11是根据本技术实施例的髋关节力矩输出数据;
43.图12是根据本技术实施例的膝关节弹簧线随步态变化位置曲线图。
44.图中,各附图标记的含义如下:
45.远离膝关节的点1、接近膝关节的点2、伸缩弹簧3、检测电路4、安装点5、足底结构外侧6、第一尼龙卡扣7、第二尼龙卡扣8、第一轴承9、第二轴承10、橡胶足底11。
具体实施方式
46.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
47.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
48.如图1所示为一种刚柔混合的外骨骼运动控制方法的流程图,本实施例按照图中所示的方法执行以下过程:通过实时足部角度和上一个运动状态并结合运动状态转换图识别抬腿相位、落腿相位和摆动相位,并提供对应的髋关节控制和膝关节控制;其中在抬腿相位时,髋关节控制提供助力,膝关节控制保持松弛;在落腿相位时,髋关节控制提供助力,膝关节控制保持张紧力最大;所述抬腿相位为从支撑相到足部完全离地之前,所述落腿相位为从足部自摆动相着地起到完全站立状态;在摆动相位时,髋关节控制为随动,膝关节控制保持不变。
49.上述方法感知运动状态时需要的传感器仅需要实现足部角度的探测即可利用软
件判断,用到的传感器少。并且提出了新的髋关节控制切入时机以及膝关节控制方法,如图2所示,本实施例中,髋关节助力控制为从左到右自第一个状态到第二个状态期间,以及从左到右自第六个状态到第七个状态期间,髋关节随动为从左到右自第三个状态到第五个状态期间,膝关节保持松弛为从左到右自第一个状态到第二个状态期间,膝关节控制保持张紧力最大为从左到右第六个状态到第七个状态期间,膝关节控制保持不变为从从左到右自第三个状态到第五个状态期间。通过上述合理控制,使得外骨骼的协调效果更好。
50.上述外骨骼结构主要作用于人体下肢,穿戴者可以通过柔性绑腹带和尼龙扣带,分别将外骨骼的大腿、小腿和足部与穿戴者的大腿、小腿和足部相适配。其中外骨骼的髋关节电机与穿戴者的髋关节对齐,驱动方式为直接驱动,膝关节电机于髋关节电机下侧,通过拉动或放松小腿结构实现间接助力,图3为膝关节柔性驱动结构。包括远离膝关节的点1,接近膝关节的点2以及为伸缩弹簧3,伸缩弹簧3安装方式为螺丝与电机输出轴部分固定,突出部分用于拉动钢绳套筒结构,其表面上内涵了磁珠,电机旋转时,会在不同的位置产生不同的磁场强度,检测电路4主要为霍尔传感器检测电路,用于检测磁场强度,其安装于外骨骼机械外壳上,位置固定于安装点5。关节电机可实现360
°
全自由度的旋转,以保证在运动过程中无干涉。图4为刚柔混合的下肢外骨骼足底结构,在足底结构外侧6处内壳部分安装了电路板,装载了检测足部运动角度的传感器,通过足部运动状态检测算法,检测足部的运动状态。穿戴者通过前后的第一尼龙卡扣7、第二尼龙卡扣8可实现对足部的穿戴,穿戴时保持穿戴者踝关节与足部保持平行,并且设置橡胶足底11用于减缓冲击,第一轴承9、第二轴承10分别为双向的轴承结构,方便穿戴者的多方向的自由运动。
51.对于支撑相位的直立状态,穿戴者往往需要将负载传递至地面,此时外骨骼将控制下肢关节保持刚性;对于下肢摆动侧。而在摆动相位时,外骨骼的摆动下肢应保持较小的人机交互力,系统将控制下肢外骨骼与人体以相同频率和幅度运动。
52.对于足部运动状态感知缺陷,本发明的实施例在抬腿的基础上实现并增加了对于落腿既支撑相位的运动状态的识别。在下肢行走过程中,其运动类型和循环方式如图5所示。
53.对于图5所示的循环过程,通过传感器检测足部角度并结合软件以及前一刻的状态判断当前具体处于何种状态。具体的算法运行步骤如下:
54.步骤1:系统初始化,自动进入初始态,辅助穿戴者直立,当前下肢关节角度运动信息和背部imu角度信息,确定各个传感器的基准值θb。
55.对于抬脚相位的识别使用如下识别算法:
56.步骤2:获取当前足部imu采集人体矢状面的角度信息,并对其数据处理,处理的步骤包括均值滤波,数据归一化,和公式1处理,处理完成后,对历史运动数据进行最小二乘法取斜率k,再根据图5所示的足底抬脚运动状态机制对单腿的运动状态进行识别。
[0057][0058]
其中θb为上电后,系统在初始化过程中获得的足部imu传感器数据基准值。θf为系统通过足部imu传感器实时获得的足部角度传感数据,其图像如图6所示,横坐标为时间,单位s,纵坐标为关节角度,单位deg,处理后的传感数据如图7所示,横坐标为时间,单位s,纵
坐标为关节角度,单位deg,在使用过足底基准值删减后,系统的所处理的角度数据仅保留了上半部分。
[0059]
图9中,状态1表示为抬脚状态,状态2表示为落脚状态,状态3表示为悬空状态,状态0表示为站立状态,其中状态1为实际的人体足部抬脚动作,横坐标为时间,单位s。
[0060]
对于落腿相位的识别使用如下识别算法:
[0061]
步骤3:获取当前足部imu采集人体矢状面的角度信息,并对其数据处理,处理的步骤包括均值滤波,数据归一化,和公式2处理,处理完成后,对历史运动数据进行最小二乘法取斜率k,再根据图5所示的足底落腿运动状态机对单腿的运动状态进行识别。
[0062][0063]
其中θb为上电后,系统在初始化过程中获得的足部imu传感器数据基准值。θf为系统通过imu传感器实时获得的足部角度传感数据,如图6所示,处理后的传感数据如图8所示,横坐标为时间,单位s,纵坐标为关节角度,单位deg,在使用过足底基准值删减后,系统的所处理的角度数据仅保留了下半部分。
[0064]
图10中,状态1表示为落脚状态,状态2表示为抬脚状态,状态3表示为悬空状态,状态0表示为落地状态,其中状态1为实际的人体足部落脚动作,横坐标为时间,单位s。
[0065]
作为优选的实施例,上述过程中,通过实时足部角度和上一个运动状态并结合运动状态转换图,识别出当前运动状态的方法为:
[0066]
当上一个状态为站立,且足部角度的斜率超过正向阈值,则状态切换为抬脚,否则状态保持为站立;
[0067]
当上一个状态为抬脚,若足部角度的斜率低于负向阈值,则状态切换为落脚,若足部角度斜率小于正向阈值且大于负向阈值,则状态切换为悬空;否则,状态保持为抬脚;
[0068]
当上一个状态为悬空,若足部角度的斜率低于负向阈值,则状态切换为落脚;否则,状态保持为悬空;
[0069]
当上一个状态为落脚,若足部角度为既定阈值,则状态切换为站立;否则,状态保持为落脚。
[0070]
通过上述方法识别状态,在整个步态的助力时相为抬腿动作和检测到落腿动作后的支撑相。
[0071]
识别出运动状态后对髋关节和膝关节进行控制包括如下具体方法:
[0072]
髋关节随动控制策略:
[0073]
对于未检测到助力时相的运动控制,控制目标为将人机交互力降低为0,基于人机交互力的pd控制策略会自动且动态的调整关节力矩输出,以pd控制器为例:系统的输出力矩表达式为:
[0074]
τ=kp(f
r-fb) kd(f
r-fb)#(3)
[0075]
其中kp为比例增益系数,kd为微分增益系数,fr为人机交互力传感器,fb为传感数据的目标值。
[0076]
髋关节抬腿助力控制策略:
[0077]
对于检测到抬腿和前摆的动作的下肢髋关节运动控制,控制策略为基于下肢左右
腿运动信息-关节力矩的抬腿的助力运动控制。
[0078][0079]
根据左右腿的主动驱动的关节角度信息,进行交互力规划,交互力规划公式为4。θ
l
为左腿的关节角度值,θr为右腿的关节角度值,k为增益系数,f
l
为规划的人机交互力,在通过公式4对交互力规划完成后,通过公式3的pd控制器控制实现对转矩电机输出的力矩,进而控制运动过程中的交互力。
[0080]
髋关节落腿助力控制策略:
[0081]
对于检测到直立后摆动作的运动实现的下肢髋关节,控制策略为基于位置的-关节力矩的落腿的助力运动控制。
[0082]fl
=kp(θ
aim-θ
now
)#(5)
[0083]
根据单条腿的主动驱动的关节角度信息,进行位置-关节人机交互力的力矩规划,交互力规划公式为5。θ
aim
为下肢关节的目标角度,θ
now
为下肢髋关节的实际运动角度。在对人机交互力进行并实现规划后,通过公式3的pd控制器控制实现对转矩电机输出的力矩,进而控制运动过程中的交互力。
[0084]
图11为髋关节的力矩随周期性步态下的曲线图,横坐标为时间,单位s,纵坐标为关节驱动模组的额定力矩的千分比,大于0处的力矩输入为髋关节的落腿相位识别给与的力矩,小于0的力矩输入抬腿动作下的髋关节输入,左右腿的助力交替出现。
[0085]
下肢膝关节运动控制基于对人体的运动意图识别,控制此策略为检测人体的单侧下肢动作意图,实现对膝关节的伸缩的位置运动控制。
[0086]
膝关节抬腿控制策略:
[0087]
抬腿时,为保持人机交互力尽可能降低,下肢膝关节控制柔性绳尽可能松动,故膝关节电机将会将会拉动钢绳至近点,由于柔性绳的处于松弛状态,此时,下肢膝关节与大腿结构可以认为通过轴承被动的连接,穿戴者可以实现对膝关节矢状面的自由运动。
[0088]
膝关节落腿控制策略:
[0089]
落腿时,控制策略为膝关节电机将会将弹簧拉绳拉动至远点,此时下肢关节将保持刚性,将人体关节拉紧,以方便将重物的重量传递至地面。对于同一步态周期下的单侧膝关节拉绳位置运动曲线图,最终结果如图12所示,高点为膝关节识别到人体处于直立或落腿的状态,运动至远点,将刚柔混合的下肢结构拉直,使其成为刚性结构,低点表示系统识别人体处于抬腿或悬空状态,运动至近点,使下肢膝关节处于柔性,不阻碍人体的正常运动。
[0090]
根据本技术的再一个方面,提供一种处理器和存储器,用于执行和存储软件,所述软件用于执行上述的运动控制方法。
[0091]
根据本技术的再一个方面,提供一种控制系统,包括外骨骼硬件和软件,所述软件用于执行上述的运动控制方法。
[0092]
需要说明的是,上述软件执行的运动控制方法与前面的介绍的运动控制方法相同,在此不再赘述。
[0093]
这些计算机程序也可装载到计算机或其他可编程数据处理设备上,使得在计算机
或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤,对应与不同的步骤可以通过不同的模块来实现。
[0094]
例如,在本技术实施例中的一种刚柔混合的外骨骼运动控制装置,包括:
[0095]
相位识别模块,用于通过实时足部角度和上一个运动状态并结合运动状态转换图,识别出当前运动状态识别抬腿相位、落腿相位和摆动相位;
[0096]
关节控制模块,用于提供对应的髋关节控制和膝关节控制;其中在抬腿相位时,髋关节控制提供助力,膝关节控制保持松弛;在落腿相位时,髋关节控制提供助力,膝关节控制保持张紧力最大;所述抬腿相位为从支撑相到足部完全离地之前,所述落腿相位为从足部自摆动相着地起到完全站立状态;在摆动相位时,髋关节控制为随动,膝关节控制保持不变。
[0097]
作为优选的实施例,所述关节控制模块还用于,所述落腿相位时,髋关节处的人机交互力如下:
[0098]flh
=kp(θ
aim-θ
now
)
[0099]
θ
aim
为髋关节的目标角度,θ
now
为肢髋关节的实际运动角度,kp为比例增益系数。
[0100]
作为优选的实施例,所述关节控制模块还用于,采用基于人机交互力的pd控制策略实现髋关节控制,所述基于人机交互力的pd控制策略控制的输出力矩如下:
[0101]
τ=kp(f
r-fb) kd(f
r-fb)
[0102]
kp为比例增益系数,kd为微分增益系数,fr为人机交互力传感器,fb为传感数据的目标值。
[0103]
上述程序可以运行在处理器中,或者也可以存储在存储器中(或称为计算机可读介质),计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
[0104]
以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。