1.本发明涉及水位的测量装置,特别涉及一种可调精度的水位测量装置及方法。
背景技术:
2.水位是反应水体、水流变化的水力要素,是水力测验中最基本的观察要素。传统的水位测量方式为安装水尺目测读数,然而,此种测量方式不仅劳动强度大,而且测量效率低、误差大;而后又出现了使用传感器自动采集水位的相关模拟量再转换为水位量的测量方法。
3.现有技术中采用传感器测量水位的装置如公开号为cn111623853a的中国专利公开的一种测量水库水位的激光测量装置及其测量方法,其中公开了一种测量水库水位的激光测量装置,包括红外测距跟踪头和水位计靶盘,所述红外测距跟踪头设在控制塔上,外测距跟踪头包括跟踪摄像头,跟踪摄像头上方设有红外测距头,跟踪摄像头与外壳体铰接,外壳体下方与固定板转动连接,外壳体内部设有第一驱动装置和第二驱动装置,第一驱动装置驱动外壳体旋转,第二驱动装置驱动跟踪摄像头上下摆动,水位计靶盘设在水库水面上,水位计靶盘通过固定锚固定;所述红外测距跟踪头中的跟踪摄像头用于跟踪水位计靶盘的位置,并通过红外测距头射在水位计靶盘上计量水位。
4.又如公开号为cn113435442a的中国专利公开的一种水位测量方法、装置、水尺及电子设备,其中公开了一种水位测量装置,包括:位置识别模块,用于将水尺图像输入至水尺位置识别模型,得到带有水尺位置框的图像;位置框截图模块,用于基于所述带有水尺位置框的图像,得到水尺位置框截图;截图分割模块,用于将所述水尺位置框截图输入至水尺分割模型,得到水尺头部图像和水尺测量部图像;水位数据获取模块,用于基于所述水尺头部图像和所述水尺测量部图像,得到水尺信息和水位数据;其中,所述水尺位置识别模型为,以所述水尺图像为样本,以预先确定的水尺图像对应的带有水尺位置框的图像为样本标签,训练得到;所述水尺分割模型为,以所述水尺位置框截图为样本,以预先确定的水尺位置框截图对应的水尺头部图像和水尺测量部图像为样本标签,训练得到。
5.上述专利公开的利用传感器等装置采集收据自动测量水位的方式虽然降低了劳动强度,提高了工作效率和检测精度,但是在实际使用的过程中,传感器安装难度大,维护困难,受环境影响较大且价格昂贵。
技术实现要素:
6.为解决现有技术中存在的问题,本发明提供一种可调精度的水位测量装置,精度可调,能满足多种场景对模型指标的不同精度要求。
7.一种可调精度的水位测量装置,包括底座,所述底座上设有三维位移系统,所述三维位移系统上活动固定有远距离探测头,所述远距离探测头与可调节读数台连通,所述可调节读数台可拆卸固定在底座上;
8.所述可调节读数台包括底板和设有标尺的倾斜台面,所述倾斜台面上可拆卸固定
有u型气液差测量管,所述u型气液差测量管的两端分别与远距离探测头和基准水箱连通;
9.所述倾斜台面靠近底板的一侧设有调节倾斜台面与底板之间的夹角的支撑杆;
10.所述u型气液差测量管上还设有用于调节u型气液差测量管内的液面始终处于度数范围内的读数调节装置。
11.具体的,由于远距离探测头活动固定在三维位移系统上,因此远距离探测头可实现六个方向上移动,能够准确、快速的移动至测量点。
12.u型气液差测量管的两端分别与远距离探测头和基准水箱连通,则u型气液差测量管会形成两个液柱,具体测量时,待测点的液体通过远距离探测头后流入u型气液差测量管内;在压强的作用下,基准水箱内的液体流入u型气液差测量管内,直至u型气液差测量管两管内的压强相等;由于两边压强相等,而两管内的液体密度和重力加速度均相等,液柱的液面高度通过倾斜台面的高度可读出,故而将液柱的高度换算成与被测模型的液面高度相关的等式后即可得出被测模型的水位。
13.当倾斜台面与底板之间的夹角越小时,同样的高度对应的倾斜台面上的长度越长,而u型气液差测量管设于倾斜台面上,即u型气液差测量管上的读数精度越高,因此通过调节倾斜台面和底板之间的夹角可以调节水位测量的精度。
14.此外,在测量过程中为了方便读数,会出现可调节读数台与远距离探测头之间存在较高的高度差的情况,这会导致计算出的水位包含了两者之间的高度差,影响测量精度,
15.当可调节读数台与远距离探测头之间的高度差过大时,会导致u型气液差测量管内液柱无法读数;因此设置读数调节装置调节页面高度,使得最终计算出的水位不包括可调节读数台与远距离探测头之间的高度差。
16.优选的,所述三维位移系统包括相互垂直的第一导轨、第二导轨、第三导轨;
17.所述第一导轨包括相互平行的、设于底座上的两条,各所述第一导轨上均设有第一滑块;
18.所述第二导轨的两端分别通过第一滑块活动固定在两个第一导轨上,所述第二导轨上设有第二滑块;
19.所述第三导轨通过第二滑块活动固定在第二导轨上,所述第三导轨上设有第三滑动部件;
20.所述远距离探测头通过第三滑动部件活动固定在第三导轨上。
21.所述第一滑块、第二滑块、第三滑动部件的运动均由电机驱动。
22.具体的,在电机的驱动下,第三滑动部件带着远距离探测头在第三导轨上滑动实现远距离探测头沿着第三导轨的轴向的运动;在电机的驱动下,第二滑块带着第三导轨沿着第二导轨的方向运动,即实现了远距离探测头沿着第二导轨的方向的运动;在电机的驱动下,第一滑块带着第二导轨沿着第一导轨的方向运动,即实现了远距离探测头沿着第一导轨的方向的运动。
23.由于第一导轨、第二导轨、第三导轨两两相互垂直,因此远距离探测头实现了六个方向上的运动。
24.优选的,所述读数调节装置为排气装置;所述排气装置包括固定在u型气液差测量管上阀门,所述阀门远离u型气液差测量管的一端固定有集气筒,所述集气筒远离阀门的一端设有密封盖;所述u型气液差测量管的两端开口朝下,排气装置设于u型气液差测量管的
顶部。
25.具体的,需要调节u型气液差测量管内的液面高度时,先将阀门关闭,而后将集气筒中注满水,随后扭紧密封盖,将密封盖扭紧后打开阀门,集气筒中的水受到重力作用流入u型气液差压测量管中,从而达到调节倒u型测量管中水位高度的目的。
26.优选的,所述可调节读数台的底板上设有若干与支撑杆适配的固定槽,支撑杆卡接在不同的固定槽中时倾斜台面与底板之间的夹角不同。
27.具体的,固定槽与支撑杆相配合的结构,使得每一个固定槽对应一个精度;更加方便使用者对精度进行调节。
28.优选的,所述u型气液差测量管的两端分别通过第一柔性软管和第二柔性软管与远距离探测头和基准水箱连通。
29.具体的,利用柔性软管连通的结构,既不影响液体的流动,也使得u型气液差测量管、远距离探测头、基准水箱三者之间位置的具有一定的可调节性。
30.优选的,所述远距离探测头包括与第一柔性软管连通的设有标尺的测试管,所述测试管远离第一柔性软管的一端固定有u型测孔。
31.本发明还提供了一种水位测量方法,采用如上任一项所述的可调精度的水位测量装置,对多点水位数据进行测量。
32.一种水位测量方法,包括如下步骤:
33.确定测量原点,将远距离探测头移动至三维位移系统的坐标原点,将被测模型中与坐标原点重合的点作为测量原点;
34.计算待测点的坐标,选定测量原点后,计算所有待测点相对于测量原点的坐标;
35.调整精度,调整远距离探测头的位置使其与测量原点的待测水体完全接触,此时通过可调节读数台上u型气液差测量管内的液面高度即可读出测量原点的静水压力,根据测量精度要求调节倾斜台面与底板之间的夹角,并记录测量原点的水位数据;
36.测量待测点的水位数据,启动电机,在电机的驱动下远距离探测头在各滑块的带动下运动至待测点,随后对远距离探测头的位置进行调整,使得远距离探测头与待测点的水体完全接触,读数并记录数据;重复此步骤完成所有测量点的水位测量。
37.优选的,当可调节读数台未安装在底座上、且与远距离探测头之间存在高度差时,通过读数调节装置调节u型气液差测量管内的水位防止水位高度超过读数范围。
38.与现有技术相比,本发明的有益之处在于:
39.利用三维位移系统,实现了测量系统与被测模型的坐标系的统一,在电机的驱动下,远距离探测头能自动定位到待测点并对电测点的水位进行检测;通过调节倾斜台面与底板之间的倾斜角度实现测量精度的调节,使得装置能满足多种场景对模型指标的不同精度要求;同时本装置结构简单、维护方便。
附图说明
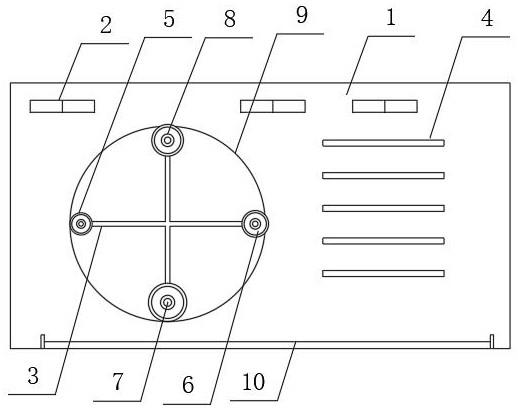
40.图1为本发明提供的可调精度的水位测量装置的装配示意图;
41.图2为本发明提供的可调精度的水位测量装置的可调节读数台的立体示意图;
42.图3为本发明提供的可调精度的水位测量装置的可调节读数台的侧视图;
43.图4为本发明提供的可调精度的水位测量装置的排气装置的结构示意图;
44.图5为本发明提供的可调精度的水位测量装置的远距离探测头的结构示意图;
45.图6为检测时的第一实施例的示意图;
46.图7为检测时的第二实施例的示意图;
47.图8为检测时的第三实施例的示意图。
具体实施方式
48.下面结合附图和具体实施例对本发明做进一步说明。
49.如图1、2所示,可调精度的水位测量装置,包括底座10,所述底座10上设有三维位移系统,所述三维位移系统上活动固定有远距离探测头30,所述远距离探测头30与可调节读数台40连通,所述可调节读数台40可拆卸的固定在底座10上;
50.所述可调节读数台40包括底板41和设有标尺的倾斜台面42,所述倾斜台面42上可拆卸固定有u型气液差测量管50,所述u型气液差测量管50的两端分别与远距离探测头30和基准水箱71连通;所述倾斜台面42靠近底板41的一侧设有调节倾斜台面42与底板41之间的夹角的支撑杆43;所述u型气液差测量管50上还设有用于调节u型气液差测量管50内的液面始终处于度数范围内的读数调节装置。
51.所述三维位移系统包括相互垂直的第一导轨21、第二导轨23、第三导轨25;
52.所述第一导轨21包括相互平行的、设于底座10上的两条,各所述第一导轨21上均设有第一滑块22;所述第二导轨23的两端分别通过第一滑块22活动固定在两个第一导轨21上,所述第二导轨23上设有第二滑块24;所述第三导轨25通过第二滑块24活动固定在第二导轨23上,所述第三导轨25上设有第三滑动部件26;所述远距离探测头30通过第三滑动部件26活动固定在第三导轨25上;所述第一滑块22、第二滑块24、第三滑动部件26的运动均由电机驱动;滑块与电机一一对应。
53.如图3所示,所述可调节读数台40的底板41上设有若干与支撑杆43适配的固定槽44,支撑杆43卡接在不同的固定槽44中时倾斜台面42与底板41之间的夹角不同。
54.即,当倾斜台面42与底板41之间的夹角α越小时,同样的高度h对应的倾斜台面42上的长度l越长,而u型气液差测量管50设于倾斜台面42上,即u型气液差测量管50上的读数精度越高,因此通过调节倾斜台面42和底板41之间的夹角α可以调节水位测量的精度。
55.所述u型气液差测量管50的两端分别通过第一柔性软管81和第二柔性软管82与远距离探测头30和基准水箱71连通。
56.如图4所示,所述读数调节装置为排气装置60;所述排气装置60包括固定在u型气液差测量管50上阀门61,所述阀门61远离u型气液差测量管50的一端固定有集气筒62,所述集气筒62远离阀门61的一端设有密封盖63;
57.所述u型气液差测量管50的两端开口朝下,排气装置60设于u型气液差测量管50的顶部。
58.如图5所示,所述远距离探测头30包括与第一柔性软管81连通的设有标尺的测试管31,所述测试管31远离第一柔性软管81的一端固定有u型测孔32。
59.具体测量方法包括如下步骤:
60.确定测量原点,将远距离探测头30移动至三维位移系统的坐标原点,将被测模型73中与坐标原点重合的点作为测量原点;
61.计算待测点的坐标,选定测量原点后,计算所有待测点相对于测量原点的坐标;
62.调整精度,调整远距离探测头30的位置使其与测量原点的待测水体完全接触,此时通过可调节读数台40上u型气液差测量管50内的液面高度即可读出测量原点的静水压力,根据测量精度要求调节倾斜台面42与底板41之间的夹角,并记录测量原点的水位数据;
63.测量待测点的水位数据,启动电机,在电机的驱动下远距离探测头30在各滑块的带动下运动至待测点,随后对远距离探测头30的位置进行调整,使得远距离探测头30与待测点的水体完全接触,读数并记录数据;重复此步骤完成所有测量点的水位测量。
64.此外,当可调节读数台40未安装在底座10上、且与远距离探测头30之间存在高度差时,通过读数调节装置调节u型气液差测量管50内的水位防止水位高度超过读数范围。
65.下面根据在检测过程中的具体情况进行详细的说明。
66.实施例一
67.如图6所示,u型气液差测量管50的ⅰ端与基准水箱71连通,ⅱ端通过远距离探测头30与被测模型73连通;当ⅰ端测压管液面高于基准水位h1,ⅱ端测压管液面高于基准水位h2,被测模型73水位低于基准水位δh时,由于ⅰ端测压管液面与ⅱ端测压管液面压强相等,因此,两者之间存在如下关系:
[0068][0069]
即
[0070]
δh=h
1-h2[0071]
其中:ρ为被测液体的密度,单位为kg/m3;g为当地的重力加速度,单位为m/s2;p为容器中的水面压强,单位为pa。
[0072]
实施例二
[0073]
如图7所示,u型气液差测量管50的ⅰ端与基准水箱71连通,ⅱ端通过远距离探测头30与被测模型73连通;当ⅰ端测压管液面高于基准水位h1,ⅱ端测压管液面低于基准水位h2,被测模型73水位低于基准水位δh,且ⅱ端测压管液面高于被测模型73时,由于ⅰ端测压管液面与ⅱ端测压管液面压强相等,因此,两者之间存在如下关系:
[0074][0075]
即
[0076]
δh=h
1-h2[0077]
此时,h2为负数。
[0078]
实施例三
[0079]
如图8所示,u型气液差测量管50的ⅰ端与基准水箱71连通,ⅱ端通过远距离探测头30与被测模型73连通;当ⅰ端测压管液面高于基准水位h1,ⅱ端测压管液面高于基准水位h2,被测模型73水位高于基准水位δh,且ⅱ端测压管液面高于被测模型73水位时,由于ⅰ端测压管液面与ⅱ端测压管液面压强相等,因此,两者之间存在如下关系:
[0080][0081]
即
[0082]
δh=h
1-h2[0083]
此时,δh为负数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。