技术特征:
1.一种锚杆支护机器人工作臂轨迹规划方法,其特征在于:包括以下步骤,s100~确定巷道安装锚杆处相对锚护机器人的位置信息;s200~确定锚杆支护机器人工作臂的运动路径;s300~根据工作臂运动路径,确定工作臂各关节的b样条轨迹的插值时间和节点矢量;s400~确定关节i的b样条轨迹的控制点;s500~根据步骤4确定的控制点,确定关节i的b样条轨迹,计算得到关节i的速度和加速度。2.根据权利要求1所述的锚杆支护机器人工作臂轨迹规划方法,其特征在于:所述的步骤s100的具体过程为,通过锚杆支护机器人视觉模块识别出巷道内需要安装锚杆的位置,选取相邻两个锚固位置作为工作臂的起始位置点s0和终止位置点s
k
,为了满足锚杆支护作业要求,锚杆支护机器人工作臂在起始位置点s0和终止位置点s
k
的速度和加速度均要求为0。3.根据权利要求2所述的锚杆支护机器人工作臂轨迹规划方法,其特征在于:所述的步骤s200的具体过程为,根据工作臂的避障需求,在起始位置点s0和终止位置点s
k
之间确定一条路径,即使用一条光滑曲线连接起始位置点s0和终止位置点s
k
,并通过包围盒算法检测工作臂按照该路径运动是否会与巷道、锚杆支护机器人自身发生碰撞,然后离散为k-1个路径点[s1, s2, s3,
ꢀ…
, s
k-1
],并根据工作臂的运动学模型,计算出所有路径点[s0, s1, s2, s3,
ꢀ…
, s
k-1
, s
k
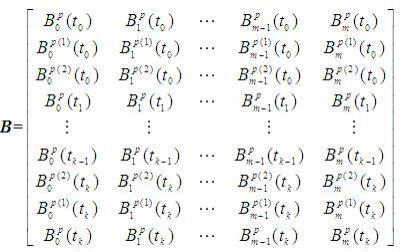
]相对于锚杆支护机器人的关节坐标。4.根据权利要求3所述的锚杆支护机器人工作臂轨迹规划方法,其特征在于:所述的步骤s300的具体过程为,b样条轨迹的模型为:其中,为关节i的b样条轨迹;t为工作臂的运动时间;i表示机器人工作臂的第i个关节;p为b样条轨迹的阶数;为关节i的b样条轨迹的控制点;的表达式为:式中,时间t
i
为b样条轨迹的时间节点矢量;对分别求一阶导和二阶导,则有:
式中,,,,,,在锚杆支护机器人工作臂运动的时间范围中,确定b样条轨迹的时间节点矢量为:。5.根据权利要求4所述的锚杆支护机器人工作臂轨迹规划方法,其特征在于:所述的步骤s400的具体过程为,根据s100确定的工作臂在起始位置和终止位置速度和加速度均为零,即:根据下式计算出b样条轨迹的控制点
式中:,, 。
技术总结
本发明属于锚杆支护机器人自动锚杆支护作业的技术领域,具体是一种锚杆支护机器人工作臂轨迹规划方法。包括以下步骤,S100~确定巷道安装锚杆处相对锚护机器人的位置信息;S200~确定锚杆支护机器人工作臂的运动路径;S300~根据工作臂运动路径,确定工作臂各关节的B样条轨迹的插值时间和节点矢量;S400~确定关节i的B样条轨迹的控制点P
技术研发人员:邓镓敏 高志强 郭治富 阎志伟 金江 刘伟立 赵永红
受保护的技术使用者:山西天地煤机装备有限公司
技术研发日:2021.12.09
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。