对制造组件的子组件进行快速分类的方法及设备
1.相关申请的交叉引用
2.本技术主张2019年5月30日提交的美国临时申请第62/854,775号的权益。通过引用将上述申请的全部内容并入本文。
技术领域
3.本公开涉及使用自动化设备和方法对制造的组件或装置进行的检测。
背景技术:
4.随着时间的推移,集成电路封装技术已经发展并变得更加复杂。二维集成电路封装已发展为适应日益密集的连接,现在包括,例如,双列直插式封装、四平面封装、针栅阵列及球栅阵列。
5.此外,集成电路的高级封装越来越多地采用三维(3d)集成。这种3d封装技术的一示例通过内插器(interposer)在两个或多个半导体器件、半导体器件和印刷电路板、或半导体器件和一些其他封装组件之间提供互连。内插器可以是硅晶片,其中已经制造有穿过硅片并填充有导电材料(例如,铜或钨)的通孔。有源硅器件也可以用作内插器。
6.当集成电路接合到内插器的两侧时,硅通孔(tsv)允许来自一个ic的信号垂直传播到另一个ic相对较短的距离。当集成电路使用内插器接合到pcb时,tsv允许来自内插器一侧的ic的信号连接pcb。此类tsv可以具有10:1或更大的纵横比。
7.在某些高级封装解决方案中,单个内插器可以用作包含数十亿个存储单元的存储ic与微处理器的逻辑ic之间的互连。这样的内插器可能需要数千个tsv。这些tsv在逻辑和内存之间形成重要的通信链接,它们的正常运行至关重要。
技术实现要素:
8.本公开提供一种用于对制造的组件或装置的子组件中检测到的缺陷进行快速分类的方法及装置。缺陷分类可以在缺陷检测之后发生,或者由于分类可以足够快以在缺陷检测期间实时执行,因此可以作为缺陷检测过程的一部分。
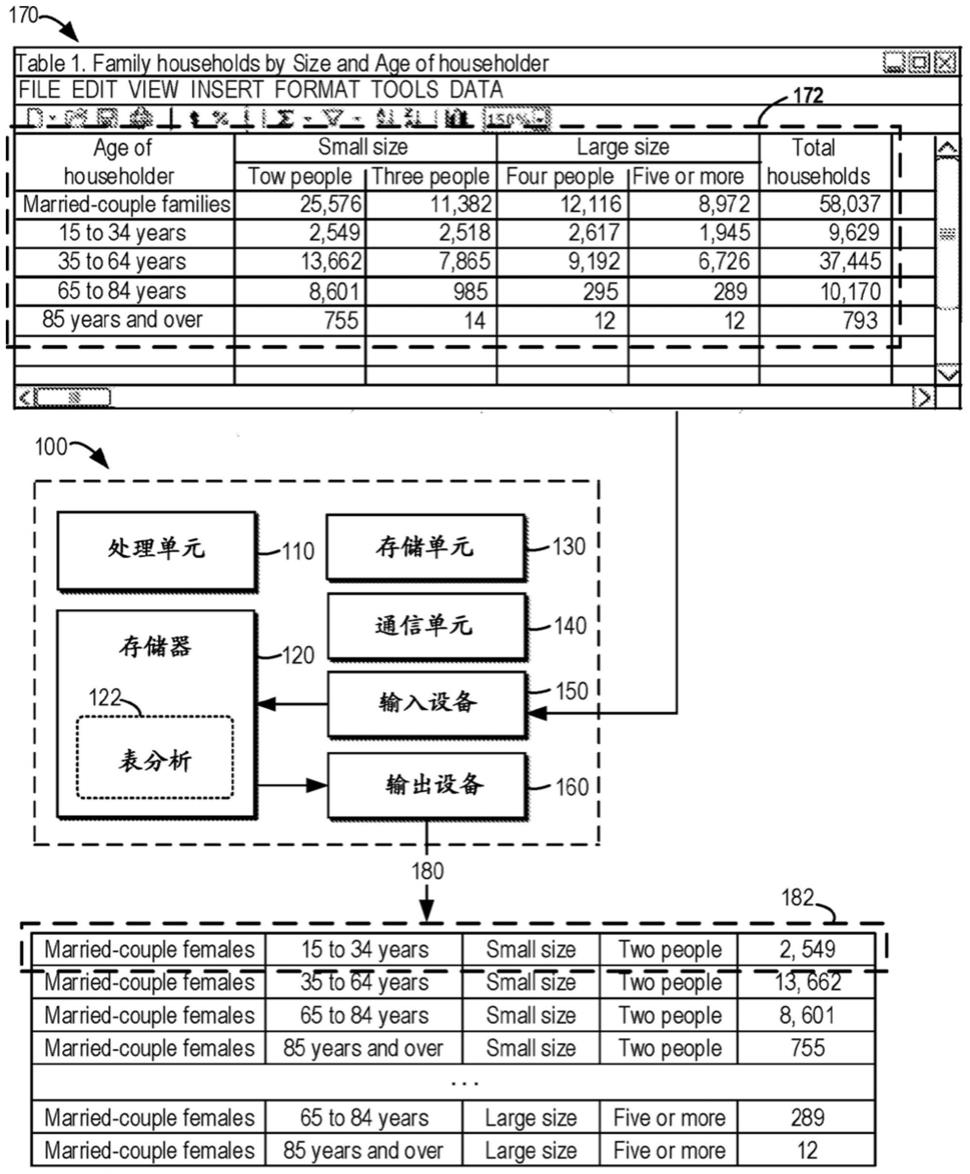
9.在示例性实现中,现在公开的技术可用于实现对组件的多个子组件中检测到的缺陷进行实时分类。组件可以是例如具有硅内插器的多芯片封装,并且子组件可以包括例如硅通孔及焊点。也可以对其他类型组件的子组件中的缺陷进行分类。
10.一实施例涉及一种对制造组件的子组件中检测到的缺陷进行分类的方法。另一实施例涉及一种使用所公开的检测组件的多个子组件的缺陷的方法来制造的产品。还公开了其他实施例、方面和特征。
附图说明
11.图1是根据本发明实施例的对在制造的组件或装置的子组件中检测到的缺陷进行快速分类的方法的流程图。
12.图2a描绘根据本发明一实施例的示出假设训练集的多维特征空间的两个特征维度的提取的特异性特征向量。
13.图2b描绘根据本发明一实施例的在变换到近似不相关、正交、多维特征空间之后的假设训练集的变换特征向量的两个特征维度。
14.图3示出根据本发明一实施例的高速x射线成像系统的横截面概述。
15.图4是根据本发明一实施例的生成桥接缺陷的合成x射线图像的示例性方法400的流程图。
16.图5a-5e示出根据本发明一实施例的集成电路封装组件中的桥接缺陷的合成x射线图像的示例性生成。图5a-5e各由宽度(尺寸)为2.75微米的合成x射线图像像素组成。
17.图6示出根据本发明一实施例的集成电路封装组件中不同类型缺陷(包括假阳性缺陷)的合成x射线图像及真实x射线图像的示例。
18.图7示出根据本发明实施例的应用与特征提取相关的方法的集成电路封装组件中的焊点的桥接缺陷的真实x射线图像的示例。图7由宽度(尺寸)为2.75微米的真实x射线图像像素组成。
具体实施方式
19.检测集成电路封装内的连接和其他子组件是否存在制造缺陷越来越成问题,也越来越具有挑战性。这些问题和挑战至少部分是由于先进封装技术的高密度和三维特性。
20.本公开提供了一种用于对组件的多个子组件中检测到的缺陷进行快速分类的技术,例如,用于封装集成电路的制造组件。所公开的技术包括用于在所制造的组件的多个子组件中并行地、实时地进行缺陷分类的方法和装置。在该技术的示例性使用中,具有数千个tsv的内插器的tsv中的缺陷可以被实时分类以确定缺陷类型。这种实时检测可以有利地用于生产线中的统计过程控制。
21.快速缺陷分类
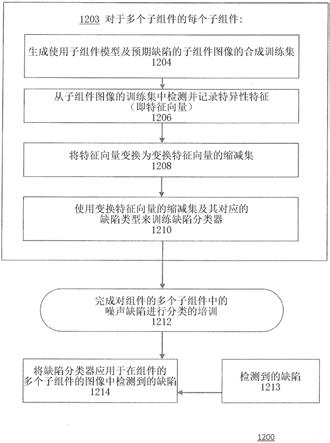
22.图1是根据本发明实施例的对在制造的组件的子组件中检测到的缺陷进行快速分类的方法1200的流程图。可以执行该方法1200以提供组件的子组件中检测到的缺陷的实时分类。分类方法1200可用于对先前检测到但未分类或需要进一步分类的缺陷进行分类。
23.对于方框1203,对于要分类的组件的每个子组件,可以执行步骤1204到1210,以训练特定于子组件图像的缺陷分类器。这些步骤可以针对多个子组件并行执行。
24.根据步骤1204,使用子组件的模型和该子组件的预期缺陷来生成子组件图像的合成训练集。可以使用蒙特卡罗模拟来生成该子组件图像的合成训练集。在生成子组件图像之前,蒙特卡罗模拟可以在预期约束内将缺陷放置在建模子组件内的随机位置、随机大小和随机形状处。缺陷类型可以包括例如导致开路的空隙和导致短路的导体之间的接触。
25.根据步骤1206,从子组件图像的合成训练集中检测并记录特异性特征。然后可以应用特征的标准化。在示例性实施方式中,特征的标准化涉及在训练样本的逐列基础上减去平均值并除以方差的过程。应用的标准化技术可能取决于特定的应用。特征检测获得一组可用于表征子组件图像的特征。集合中的特征数量可以减少或限制为可管理数量的实质性特征。然后可以通过其特征向量来描述每个子组件图像。
26.在示例性实现中,可以使用surf特征检测来执行特异性特征的检测,其中所述
surf特征检测可参考herbert bay等人在eccv 2006,part i,lncs 3951,pp.404
–
417,springer-verlag berlin heidelberg 2006“加速鲁棒特征(speeded-up robust features):surf”中所述。有利地,surf特征检测是旋转不变的。在另一实施方式中,可以使用haar滤波器来执行特异性特征的检测以获得haar小波特征。在另一实施方式中,可以通过提取hu矩来执行特异性特征的检测。在另一实施方式中,可以通过使用定向梯度直方图(hog)来执行特异性特征的检测。
27.根据步骤1208,可以将变换应用于特征向量(根据步骤1206获得)以产生一组变换后的特征向量。至少在某些情况下,变换后的特征向量的集合可以被视为跨越特征空间的近似不相关的特征向量的集合。
28.应注意,根据本发明的实施例,所应用的变换可以是主组件分析(pca)变换。pca变换可能导致变换后的特征空间与变换前的特征空间相比具有降低的特征维数。例如,haar特征集可以为每个样本生成256个特征,而pca变换可以将该特征集减少到仅前25个组件,从而将维度从256xn减少到25xn(其中n是训练样本的数量)。这种减少的特征维度有利地减少了所需的处理量,从而加快缺陷分类。
29.图2a中示出子组件中缺陷的假设训练集的检测到的特征向量(根据步骤1206获得),其中,为了便于说明,多维特征空间的描述被简化为显示具有特征a和b的二维。图2a中的每个点表示来自子组件图像训练集的子组件图像的特征向量。在图2b中描绘了在变换后(根据步骤1208进行变换)的假设训练集的特征向量的二维,其中特征a'和b'是变换后的特征空间的二维。
30.有利地,由于特征向量在被用于训练缺陷分类器之前已经被变换到变换后的特征空间(根据步骤1208),因此改进了缺陷分类器(在步骤1210中训练并在步骤1214中应用)的能力和准确度。这通过与图2a中的特征向量(点)相比,图2b中的特征向量(点)被更好地分成组来表示。因此,图2b中的特征向量的分组可以更容易地通过缺陷分类器与缺陷类别相关联。
31.根据步骤1210,合成训练集的变换特征向量连同相应的缺陷类型用于训练子组件的偏转分类器。缺陷分类器可以是例如人工神经网络。也可以使用除人工神经网络之外的其他类型的分类模型。可以使用的不同类型的分类模型的一示例是支持向量机。另一种分类模型是基于决策树的分类模型。基于决策树的分类模型包括例如随机森林模型和梯度提升机模型。
32.根据步骤1212,完成每个子组件的缺陷分类器。至此,缺陷分类器的训练已完成,分类器准备对组件的多个子组件中的缺陷进行分类。
33.根据步骤1214,多个子组件的缺陷分类器可以应用于在这些子组件的图像中检测到的缺陷(根据步骤1213)。以此方式,多个子组件中的缺陷可以有利地作为制造过程的一部分被实时并行地分类。
34.现在描述应用于子组件的真实x射线图像的缺陷分类器的示例。真实x射线图像是桥接缺陷的图像,如图7所示,其由宽度为2.75微米的真实x射线图像像素组成。如本文所用,术语“桥接缺陷”是指集成电路封装组件的两个相邻焊点之间的焊料短路。例如,桥接缺陷可能位于引脚网格阵列(pga)封装的引脚附近的焊点之间。作为另一示例,桥接缺陷可能在用于球栅阵列(bga)封装的球的附近焊点之间。类似地,桥接缺陷可能存在于其他类型的
集成电路封装中。
35.作为第一示例,从图7所示的桥接缺陷的真实x射线图像中提取hu矩特征。附录a提供了原始hu矩特征、标准化的hu矩特征及pca变换后的标准化的hu矩特征。
36.作为第二示例,从图7所示的桥接缺陷的真实x射线图像中提取haar小波特征。附录b提供了原始haar小波特征、标准化的haar小波特征及pca变换后的标准化的haar小波特征。
37.作为第三示例,从图7所示的桥接缺陷的真实x射线图像中提取定向梯度直方图(hog)特征。附录c提供了原始hog特征、标准化的hog特征及pca变换后的标准化的hog特征。
38.高速x射线成像系统中的示例性实现
39.本发明公开的技术能够对正在制造的组件内的多个子组件检测到的缺陷进行实时分类。在一种实施方式中,本公开的技术可以结合高速x射线成像仪(美国专利号9,129,715中adler等人所公开的)或具有传统x射线显微镜几何结构的仪器来实施。
40.在2015年9月8日发布的美国专利第9,129,715号中,adler等人公开了一种具有高通量x射线源的创新型x射线显微镜,该x射线显微镜允许对集成电路(ic)、印刷电路板(pcb)和其他ic封装技术等物体进行高速计量或检测。待研究物体由来自具有指定x射线光谱的扩展源的准直高通量x射线照射。该系统还包括用于控制物体的位置和方向的平台;可吸收x射线并发射可见光子的闪烁体,其位置非常接近(或接触)物体;光学成像系统,其可形成由闪烁体发射的光子的高度放大、高分辨率图像;以及ccd阵列等探测器,其用于将图像转换为电子信号。
41.图4示出根据本发明优选实施例的高速x射线成像系统的实施例的横截面概图。x射线发射器101发射x射线111。然后,在一些实施例中,利用与发射器101的距离及具有孔径142的板140,将这些x射线成形为准直x射线束211。然后,该准直的x射线束照射待检测的物体200。通过物体200透射的x射线照亮闪烁体组件300,该组件包括闪烁体310,并且在一些实施例中,还包括用于闪烁体的支撑件350。闪烁体310吸收一部分x射线,并释放通过发射可见光子411来吸收的部分能量。
42.使用光学系统400,由闪烁体发射的可见光子411的放大图像511形成在图像检测器500上。图像检测器500将放大图像511的强度转换为电子信号。图像检测器500可以包括电子传感器,例如电荷耦合器件(ccd),或本领域技术人员已知的另一图像传感器。电子信号通过连接器558传输到电子和处理系统600,在一些实施例中,电子和处理系统600可以显示图像结果,并且在一些实施例中,可以存储图像结果和/或结合一个或多个计算机系统700对图像结果执行图像处理算法。
43.对于发射诸如x射线的电离辐射的任何源,通常明智的做法是在x射线源100周围提供屏蔽998,并且在某些情况下合法地要求操作。此类屏蔽998可以是铅金属成型片的简单外壳,或者是由本领域技术人员将已知的多种x射线吸收材料(例如掺铅玻璃或塑料)中的任何一种制成的更复杂的设计。屏蔽是为了防止直接来自发射器101或从一些其他表面反射的随机x射线造成不必要的影响,尤其用于控制系统的各种电子元件中的杂散信号。
44.类似地,对于一些实施例,还可能需要围绕光束路径的附加屏蔽999,并且在某些情况下合法地要求操作。此类附加屏蔽999可以是铅金属成形片的简单外壳,或者是由本领域技术人员将已知的多种x射线吸收材料(例如掺铅玻璃或塑料)中的任何一种制成的更复
杂的设计。需要附加屏蔽999以防止直接来自发射器101或从一些其他表面反射的随机x射线造成不必要的影响,尤其用于控制系统的各种电子元件中的杂散信号。
45.由于某些图像检测器500(例如,包括ccd传感器的图像检测器500)可能对x射线曝光特别敏感,因此在一些实施例中,闪烁体组件300的一部分也可以全部或部分地使用如掺铅玻璃等材料进行制造,其中上述材料吸收x射线同时透射由闪烁体发射的可见光子411。
46.用于x射线源的设备可以包括安装件106,其可以移动x射线源100相对于物体200的位置,从而改变x射线束在物体上的入射角。安装件106可以设计为允许x射线源100在x-z平面、y-z平面或任何其他轴组合中摆动。还可以沿z轴移动源,以使x射线源100更靠近物体200。这可能会使光束更亮、增加信号强度,但以具有x射线射束为代价准直度较低,从而降低了分辨率。可以通过减小x射线源的光斑尺寸来减少或消除这种影响。
47.使用安装件106的x射线源100的运动可以由计算机系统700以多种方式控制。在一些实施例中,源安装件106可以将x射线源100移动到固定位置以允许捕获图像。在一些实施例中,安装件106可以在收集图像时连续移动x射线源100,从而允许将透射通过物体200的x射线强度的动态变化记录为照明角度的函数。在一些实施例中,可以将x射线发射器101移动到偏离垂直入射角至少10度的位置。
48.在一些实施例中,可以通过协调使用源安装件106的x射线源100的运动和使用物体安装件250的物体200的运动来实现对物体200上的x射线束211的入射角的进一步调整。在一些实施例中,安装件250的运动由控制器259通过连接器258控制。控制器259又由操作员的直接输入或由计算机系统700提供的电子指令指示。
49.在一些实施例中,屏蔽998将被设计成封闭x射线源100和源安装件106。在其他实施例中,屏蔽998可以被设计成仅封闭x射线源,而安装件106被设计成在屏蔽998移动x射线源100时移动屏蔽998。
50.在本发明的一些实施例中,可以使用多个x射线源来产生具有不同入射角的图像。x射线源可以在空间中固定或可移动,并且可以顺序或同时操作。x射线源可以手动操作或由一个或多个计算机系统700控制。
51.根据本发明的一实施例,计算机系统700包括一个或多个处理器、数据存储器和数据存储器等其他组件。计算机系统700可以在数据存储和/或数据存储器中包括具有用于根据本文公开的方法对子组件中检测到的缺陷进行分类的可执行指令的软件模块。
52.图4是根据本发明一实施例的生成桥接缺陷的合成x射线图像的示例性方法1400的流程图。根据图1中的步骤1204,方法1400可以使用蒙特卡罗类型程序进行多次应用,以便生成大量合成x射线图像作为训练集。
53.如本文所用,术语“桥接缺陷”是指集成电路封装组件的两个相邻焊点之间的焊料短路。例如,桥接缺陷可能位于引脚网格阵列(pga)封装的引脚附近的焊点之间。作为另一示例,桥接缺陷可能位于球栅阵列(bga)封装的球的附近焊点之间。类似地,桥接缺陷可能存在于其他类型的集成电路封装中。
54.根据步骤1402,桥缺缺陷的外圆区域可以设置为具有关于第一标称尺寸的随机变化的直径(“外桥接直径”)。图5a中描绘了示出桥接缺陷的合成图像的这种外圆区域1501和外径1502的示例,其由宽度为2.75微米的合成x射线图像像素组成。第一标称尺寸可以是在待检测组件的x射线图像中预期的这样的外圆区域1501的平均尺寸。随机变化预期会相对
小于标称尺寸,并且可以对应于该图像特征的预期变化。包括随机变化以便生成包括各种外圆区域1501的合成x射线图像的训练集。
55.根据步骤1404,可以将桥接缺陷的内圆区域设置为具有关于标称尺寸的随机变化和随机偏心率的直径(“内桥接直径”)。在此,偏心率是指外圆区域1501的中心与内圆区域1503的中心之间的角度和距离(即,位移向量)。图5a中示出用于桥接缺陷的合成图像的这样的内圆区域1503和内径1504的示例。如图所示,内径1504是焊点位置处的内部(阴影较深)圆形区域1503的直径,而外径1502是围绕内圆区域1503的图像的外部(阴影较浅)圆形区域1501的直径。
56.根据步骤1406,可以在0到360度之间随机选择桥接的角度。图5b中示出显示桥接缺陷的合成x射线图像的这种角度θ的示例。可以随机选择角度θ,以便生成合成x射线图像的训练集,其包括在0度和360度范围内的各种角度。
57.根据步骤1408,宽度1516的正弦变化被设置为从第一焊点处的外径1502以限定的角度朝向第二焊点(未示出)。图5c中示出显示桥接缺陷的合成x射线图像的这种正弦变化的示例。如进一步所示,正弦变化可以应用于右侧1512和左侧1514,以便在宽度1516远离焊点时变窄或“挤压”宽度1516,从而在两个焊点之间形成“桥接”。
58.根据步骤1410,可以将模糊添加到结果图像。在示例性实现中,模糊可以是高斯模糊,以便模拟检测器响应。图5d中示出向桥接缺陷的合成x射线图像添加高斯模糊噪声的示例。
59.根据步骤1412,可以将噪声添加到结果图像。在示例性实施方式中,噪声可以是高斯噪声以模拟检测器响应。图5e中显示了向桥缺陷的合成x射线图像添加高斯噪声的示例。
60.图6示出根据本发明一实施例的集成电路封装组件中不同类型缺陷(包括假阳性缺陷)的合成x射线图像及真实x射线图像的示例。每行与不同类型的缺陷相关。
61.第一行示出示例合成x射线图像和示例真实x射线图像(焊点中的空洞缺陷)。如图所示,在示例合成x射线图像中,空洞(“空洞”)缺陷(较浅的阴影区域)的位置在焊点(较深的阴影周围区域)内变化。根据本发明的一实施例,相对于焊点的中心,空隙可以具有各种角度和各种半径。在示例真实x射线图像中可以看到焊点内空洞缺陷(较浅阴影区域)位置的类似变化(较深阴影周围区域)。
62.第二行示出示例合成x射线图像和示例真实x射线图像焊点的非湿开放(“非湿”)缺陷。如图所示,非湿开放缺陷的合成x射线图像具有较暗的内部区域,周围是较亮的外部区域。这些区域的形状、大小和位置可以根据本发明的实施例而变化。在示例真实x射线图像中可以看到这些区域的形状、大小和位置的类似变化。
63.第三行示出示例合成x射线图像和示例真实x射线图像焊点的桥接(“桥接”)缺陷。上文关于图4和图5a-5e描述了针对这种桥接缺陷的合成x射线图像的生成。
64.最后,第四行示出示例合成x射线图像和示例真实x射线图像,即焊点的假阳性(“假阳性”)缺陷。这种假阳性缺陷的合成x射线图像对应于真实的x射线图像,否则通常会欺骗缺陷检测程序以检测假阳性缺陷。如图所示,假阳性缺陷的合成x射线图像可能具有与焊点区域重叠的暗弧或圆形区域。暗弧或圆形区域的位置和尺寸可以根据本发明的实施例而变化。在示例真实x射线图像中可以看到这些区域的位置和尺寸的类似变化。
65.结论
66.在本公开中,提供了许多具体细节,例如系统、组件和方法的示例,以提供对本发明实施例的透彻理解。然而,本领域的普通技术人员将认识到,可以在没有一个或多个具体细节的情况下实施本发明。在其他情况下,未示出或描述公知细节以避免模糊本发明的方面。
67.尽管已经提供了本发明的特定实施例,但应当理解,这些实施例用于说明目的而不是限制。许多附加实施例对于阅读本公开的本领域普通技术人员将是显而易见的。
68.附录a
69.hu矩特征
70.原始特征:[3.14328393 7.06604191 10.75016747 11.41256977 22.49603348 14.94920188-23.5027598]
[0071]
标准化的特征:[-0.53318488-0.31819097-0.08897692-1.73392107 0.184768440.18323309-1.05591272]
[0072]
pca-变换的特征:[1.24788744-1.23553482 0.18079815 1.00908959 0.66650515]
[0073]
附录b
[0074]
haar小波特征
[0075]
原始特征:[2.93435906e 05 1.66203563e 05 2.05759844e 05 3.14910063e 05 1.62897656e 05 8.22456250e 03 1.70358438e 04 1.41939875e 05 1.49258938e 05 1.63750625e 04 1.02781250e 04 5.61136250e 043.01576938e 05 1.51447719e 05 5.17933125e 04 2.78960000e 04 2.65640938e 04 1.27273250e 05 1.07436594e 05 5.08993750e 03 1.05114688e 04 3.89150000e 03 5.18531250e 02 4.55443750e 04
ꢀ‑
4.81350625e 04
ꢀ‑
1.38077500e 04
ꢀ‑
4.69806250e 03
ꢀ‑
1.88125000e 01
ꢀ‑
9.79518750e 03
ꢀ‑
4.64344063e 04
ꢀ‑
4.76731250e 03 1.04002500e 04 2.65640938e 04 1.09151875e 04
ꢀ‑
3.29324062e 04
ꢀ‑
2.02543750e 03 1.20357844e 05 2.72912500e 03
ꢀ‑
1.04064688e 04
ꢀ‑
5.33921250e 04 6.40315000e 04 7.80487500e 03 1.95193750e 03
ꢀ‑
1.82297500e 04 1.84230625e 04 4.98295938e 04
ꢀ‑
9.33975000e 03 9.67125000e 03
ꢀ‑
2.65640938e 04 1.70987500e 03 2.61288438e 04 2.02543750e 03 1.13147813e 04 8.79937500e 02
ꢀ‑
5.08953125e 03
ꢀ‑
1.54791250e 04
ꢀ‑
4.82762500e 03
ꢀ‑
6.09931250e 03 2.78137500e 03
ꢀ‑
1.11291875e 04 9.79518750e 03
ꢀ‑
1.86615313e 04
ꢀ‑
3.31687500e 03
ꢀ‑
1.06150000e 03]
[0076]
标准化的特征:[0.87006186 0.66900659 1.25152468 0.98145753 0.8436835 0.06371535 0.6437511 0.16926711 0.34896445 0.34962943
ꢀ‑
0.45556852
ꢀ‑
0.96005416 0.84187941 0.14607257
ꢀ‑
1.25278763
ꢀ‑
1.62527229
ꢀ‑
0.0064092 1.82772299 1.38738134
ꢀ‑
0.67485078
ꢀ‑
0.27139797
ꢀ‑
0.04610001
ꢀ‑
0.51904878 1.04573775
ꢀ‑
1.37722378
ꢀ‑
0.69685576 0.54601334 0.53591319 0.49751266 0.21454218 1.36455096 1.88790627 0.07431729
ꢀ‑
0.26847317
ꢀ‑
0.75203094 0.98114472 1.51728587
ꢀ‑
0.21444256
ꢀ‑
0.58670486
ꢀ‑
0.15267357 0.21949246 0.68645883 0.82440775 0.96042809
ꢀ‑
0.17717588 1.58532597 0.41385095 1.66222564
ꢀ‑
0.5114999 0.14715701 0.87556848
ꢀ‑
0.72537654 0.97262151
ꢀ‑
0.38456128
ꢀ‑
0.27619464
ꢀ‑
0.69238339
ꢀ‑
0.26881351
ꢀ‑
0.7345537
ꢀ‑
0.29048343
ꢀ‑
0.33084708
ꢀ‑
0.23272941
ꢀ‑
1.50844119
ꢀ‑
0.02226293 0.93648942]
[0077]
pca变换的特征:[1.58174837 0.28292373 3.17669827 3.88559348-3.02797671
ꢀ‑
0.74494311 1.33459835 0.37467086 1.47683816 0.24440247]
[0078]
附录c
[0079]
定向梯度直方图
[0080]
原始特征:[0.36222847 0.36222847 0.36222847 0.28554118 0.36222847 0.36222847 0.36222847 0.36222847 0.35967456 0.34762926 0.2727252 0.34526402 0.39318157 0.39318157 0.39318157 0.30401741 0.40166936 0.40166936 0.40166936 0.16558522 0.40166936 0.40166936 0.40166936 0.06746774 0.35355339 0.35355339 0.35355339 0.35355339 0.35355339 0.35355339 0.35355339 0.35355339]
[0081]
标准化的特征:[-0.2505845
ꢀ‑
0.77648044
ꢀ‑
0.77648044
ꢀ‑
0.21926073
ꢀ‑
0.6398331 0.38377703 0.72861962 1.18678489
ꢀ‑
0.21116755 0.32099213
ꢀ‑
0.56476674 0.25605038 0.36116854 0.27493585 0.29103731 0.19869448 0.30984547 0.62124834 0.80769758
ꢀ‑
0.52036542
ꢀ‑
0.01248327
ꢀ‑
0.01248327 0.28674745
ꢀ‑
1.58985066
ꢀ‑
1.03843419
ꢀ‑
1.22593903
ꢀ‑
0.70697469 0.06845308
ꢀ‑
1.06464993 0.23904948 0.66385488 1.75954143]
[0082]
pca变换的特征:[-2.83881597
ꢀ‑
0.1499109
ꢀ‑
1.15626181
ꢀ‑
2.05703739
ꢀ‑
0.82443568
ꢀ‑
0.12173823
ꢀ‑
0.10296421 0.59802817 0.07482459
ꢀ‑
0.28208322]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。