技术特征:
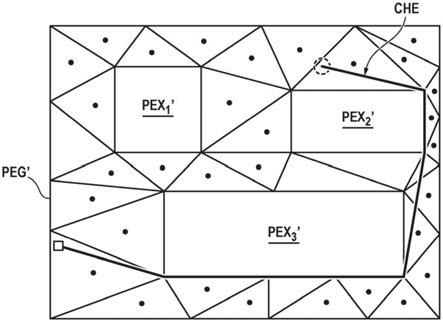
1.一种使用三维环境的数字处理来建立根据不同优先级优化的无人驾驶航空装置路径的建模方法,其特征在于,所述方法包含以下数字处理步骤:(a)提供其中禁止飞行的体积(pexi)的三维模型,(b)将所述模型细分为单独元素(pvk),(c)确定每个单独元素的中心(pk),(d)建立和存储图,所述图的节点(pk,ik)由所述中心的至少一部分形成,并且所述图的分支由所述节点之间的距离和与给定优先级相关联的至少一种加权来加权。2.根据权利要求1所述的方法,其中所述优先级包括绝对距离优先级、行进时间优先级、能量消耗优先级和风险优先级中的至少两个优先级。3.根据权利要求1和2中的一项所述的方法,其中所述加权中的至少一个取决于影响一组分支的约束。4.根据权利要求3所述的方法,其中所述约束包含影响所有分支的约束矢量。5.根据权利要求4所述的方法,其中所述约束矢量是风矢量,每个分支具有一对分别与行进方向相关联的权重,并且每个权重明显地受制于所述风矢量。6.根据权利要求1和2中的一项所述的方法,其中所述加权使得根据行进方向将不同的权重分配给同一分支,以便生成优选的行进方向。7.根据权利要求1和2中的一项所述的方法,其中所述加权基于根据飞行空间中的位置定义不同约束级别的映射。8.根据权利要求7所述的方法,其中所述约束级别被包括在包含最大授权速度约束和风险约束的组中。9.根据权利要求8所述的方法,其中所述约束能够取一值,使得对应的区域变为禁飞区。10.根据权利要求1至9中的一项所述的方法,其中步骤(a)包含提供具有其中在物理上不可能飞行的体积(pexi)的三维模型,并以静态安全裕度数据重新处理该模型。11.根据权利要求10所述的方法,其中步骤(a)包含将所述三维模型细分为水平切片(txy),所述体积在水平面上的投影在每个切片的整个厚度上是相同的,以及在每个水平面中实现细分为单独元素。12.根据权利要求11所述的方法,其中通过三角剖分进行所述细分。13.根据权利要求12所述的方法,其中所述三角剖分是德洛涅三角剖分(delaunay triangulation)。14.根据权利要求11至13中的一项所述的方法,其中步骤(d)包含通过距离最小化方法在位于相邻水平面中的节点之间建立所述图的分支。15.一种用于由无人驾驶航空装置确定由根据权利要求1至14中的一项所述的方法获得的图所建模的三维空间中的两点之间的路径的方法,其特征在于,所述方法包含以下步骤:-确定路线的优先级,-考虑或建立对应于所确定的优先级的给定图,以及-通过所述给定图中的最佳路径计算来定义所述装置上的所述路线。16.根据权利要求15所述的方法,其中对所述图的所述分支进行加权的步骤是通过远
程接收具有未加权分支的起始图,并在所述装置上根据优先级对所述分支进行加权来实现的。17.根据权利要求15和16中的一项所述的方法,其包含在飞行期间,更新所述图的至少一部分的分支权重的步骤,以及重新计算所述图中的所述最佳路径的步骤。18.根据权利要求17所述的方法,其中所述图的所述分支的所述权重的所述更新是根据优先级的变化来执行的。19.根据权利要求17或18所述的方法,其中所述图的至少一部分的所述分支的所述权重的所述更新是基于接收到对应于当前优先级的所述加权的修改的加权数据来执行的。20.根据权利要求15至19中的一项所述的方法,其中所述更新所述图的所述分支的所述权重的步骤包含基于动态出现的禁止区生成禁止分支。21.根据权利要求20所述的方法,其中所述禁止区是通过所述装置与位置确定所述禁止区的其它设备的远程通信来确定的。22.根据权利要求21所述的方法,其中所述其它设备是另一无人驾驶航空装置。23.根据权利要求22所述的方法,其中所述禁止区是禁止高度着陆。24.根据权利要求23所述的方法,其中所述其它设备与临时现场干预相关联。25.根据权利要求15至24中的一项所述的方法,其中所述最佳路径的计算是根据所述装置的敏捷性约束来执行的。26.一种用于操纵无人驾驶航空装置的方法,其包含以下步骤:-通过根据权利要求15至25中的一项所述的方法来确定路径,-应用至少一个轨迹松弛因子,-确定作为所述松弛因子的函数的允许的轨迹偏差,以及-仅当实际测量的轨迹偏差超过所述允许的轨迹偏差时才应用轨迹校正指令。27.根据权利要求26所述的方法,其中所述松弛因子是从表示以下信息片段之一的至少一个数据片段确定的:安装在所述装置上的gps单元的当前精度、风、所述装置对操纵命令的响应、所述装置的尺寸、装置的类型。28.一种用于操纵无人驾驶航空装置的方法,其包含以下步骤:-通过根据权利要求15至25中的一项所述的方法来确定路径,-在所述飞行期间测量所述装置的动态特性,-根据所述动态特性的演变动态地确定新路径。29.根据权利要求28所述的方法,其中所述动态特性包含来自机上可用能量和行为异常的至少一个特性。30.根据权利要求28或29所述的方法,其中所述图包含指定着陆站或区的节点,并且其中动态地确定所述新路径的步骤考虑所述着陆站或区节点的位置。31.根据权利要求30所述的方法,其中动态地确定所述新路径的步骤还考虑站或着陆区节点的状态(空闲、占用)。32.根据权利要求29所述的方法,其包含在行为异常的情况下修改所述优先级。33.一种无人驾驶航空装置,其特征在于,所述无人驾驶航空装置包含数字处理和无线通信电路,所述数字处理和无线通信电路设计用于实现根据权利要求1至32中的一项所述的方法的全部或部分。
34.一种计算机程序,其适于加载在无人驾驶航空装置上,其特征在于,所述计算机程序包含适于实现根据权利要求1至32中的一项所述的方法的全部或部分的指令。
技术总结
本发明公开了一种使用三维环境的数字处理来建立根据不同优先级优化的无人驾驶航空装置路径的建模方法,所述方法的特征在于,所述方法包含以下数字处理步骤:(a)提供其中禁止飞行的体积(PEXi)的三维模型,(b)将所述模型细分为单独元素(PVk),(c)确定每个单独元素的中心(Pk),(d)建立和存储图,所述图的节点(Pk,Ik)由所述中心的至少一部分形成,并且所述图的分支由所述节点之间的距离和与给定优先级相关联的至少一种加权来加权。还提出了一种用于使用无人驾驶航空装置确定由这种图所建模的三维空间中的两点之间的路径的方法,以及使用这种确定的操纵方法。及使用这种确定的操纵方法。及使用这种确定的操纵方法。
技术研发人员:P
受保护的技术使用者:无人机公司
技术研发日:2020.07.01
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。