1.本技术涉及飞行设备的领域,尤其是涉及一种陆地巡航无人机。
背景技术:
2.无人机具有能够适应复杂恶劣环境、不需要人员驾驶、不会造成人员损失的巨大优点,因此获得了越来越广泛的应用。目前,遥感测控、航拍测绘、环境侦察等领域都使用了无人机技术。随着应用的增多,无人机技术越来越热,无人的机种类趋于多样化。
3.授权公告号为cn209051599u的专利公开了多摄像头无人机,包括机身,所述机身的上端面靠近外沿处均设置有三个圆盘底座,且圆盘底座的上端活动安装有摄像头,所述摄像头与圆盘底座之间连接有活动杆,所述机身的两侧均对应设置有三组翼杆,所述翼杆为两个一组,所述翼杆与机身的连接处设置有连接臂,且翼杆远离连接臂的一末端设置有无刷电机,所述无刷电机的上端面连接有连接套,且连接套的两侧均设置有旋叶。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:无人机在对某特点区域进行巡航时,飞行耗能较大,使得巡航时间短,无人机巡航能力不足。
技术实现要素:
5.为了提高无人机的巡航能力,本技术提供一种陆地巡航无人机。
6.本技术提供的一种陆地巡航无人机采用如下的技术方案:
7.一种陆地巡航无人机,包括机体、安装在机体上的机臂和转动安装在机臂上的螺旋桨,所述机体的底部设置有地面移动装置,所述地面移动装置包括若干个支撑杆、主动辊轮、从动辊轮、履带和两个安装架,两个所述安装架沿机架的长度方向对称设置在机架的两侧,每个所述支撑杆的一端固定安装在机体的底壁、另一端与安装架的顶壁固定连接,所述主动辊轮和从动辊轮沿机架的长度方向间隔转动安装在两个安装架之间,所述履带连接在主动辊轮和从动辊轮上,所述安装架上设置有用于驱使主动辊轮转动的驱动件。
8.通过采用上述技术方案,当无人机到达巡逻区域后下落到地面,使履带与地面接触,然后旋翼停止工作,启动驱动件,驱动件带动主动辊轮转动,主动辊轮通过滑动摩擦带动履带和从动辊轮转动,使无人机在对巡逻区域进行巡逻,由于旋翼不进行工作仅依靠驱动件进行工作,使无人机整体的能耗降低,提高了无人机的巡航能力。
9.可选的,所述驱动件为第一伺服电机,所述第一伺服电机的输出轴与主动辊轮同轴固定连接。
10.通过采用上述技术方案,第一伺服电机可以驱使主动辊轮正反转,使与主动辊轮滑动摩擦的履带前后移动,从而使无人机可以执行前进或后退的工作过程,提高了无人机的适用性。
11.可选的,所述支撑杆包括内杆和外杆,所述外杆固定设置在安装架上,所述内杆同轴滑动穿设在外杆远离安装架的一端,所述内杆远离安装架的一端与机体固定连接,所述内杆上设置有用于驱使内杆远离安装架的弹性件。
12.通过采用上述技术方案,当无人机在地面上进行巡逻遇到颠簸路段时,内杆和外杆之间发生相对位移,弹性件有效阻碍内杆向靠近外杆的方向移动,使得机体振动幅度减小,提高了无人机的减振效果,增加了无人机在地面移动的稳定性。
13.可选的,所述外杆上设置有用于限制内杆沿外杆的长度方向滑动的限位件,所述限位件为插销,所述外杆上开设有穿孔、所述内杆上开设有与插销适配的插孔,所述插销穿过外杆的穿孔并穿设在内杆的插孔内。
14.通过采用上述技术方案,当对无人机进行收纳时,工作人员将内杆向靠近外杆的方向移动,然后使用插销穿过外杆的穿孔并穿设在内杆的插孔内,将内杆沿外杆的长度方向进行固定,有效减少了无人机的占用空间,方便收纳无人机。
15.可选的,所述机体的顶壁固定设置有太阳能板。
16.通过采用上述技术方案,太阳能板可以将太阳转化为电能,提高无人机的巡航能力。
17.可选的,所述机体的顶壁上开设有用于容纳太阳能板的容纳槽,所述太阳能板固定设置在容纳槽的底壁上,所述机体的顶壁上转动设置有用于封闭容纳槽的开口的盖板,所述机体上设置有用于驱使盖板转动的驱动装置。
18.通过采用上述技术方案,当无人机到达地面后,启动装置驱使盖板转动,将容纳槽的开口打开,使太阳能板能够吸收太阳的能量,太阳能板内置在机体的容纳槽内部,减少了无人机飞行时太阳能板带来的风阻,有效提高了无人机的巡航能力。
19.可选的,所述驱动装置包括第二伺服电机、主动齿轮和从动齿轮,所述第二伺服电机的输出轴与主动齿轮同轴固定连接,所述从动齿轮固定设置在盖板与机体之间的转动轴上,所述主动齿轮和从动齿轮啮合,所述第二伺服电机用于驱使主动辊轮转动。
20.通过采用上述技术方案,当驱使盖板转动时,启动第二伺服电机,第二伺服电机带动主动齿轮转动,主动齿轮通过齿轮啮合带动固定安装在盖板与机体之间的转动轴上的从动齿轮转动,从而使盖板与机体之间发生相对转动,转动盖板方便。
21.可选的,所述容纳槽的底壁上设置有用于驱使太阳能板沿竖直方向升降的升降装置,所述升降装置包括气缸,所述气缸固定设置在容纳槽的底壁上,所述气缸的活塞杆与太阳能板固定连接。
22.通过采用上述技术方案,当无人机进行太阳能充电时,启动气缸,气缸的活塞杆带动太阳能板向远离机体的方向移动,使太阳能板伸出机体外,使太阳照射在太阳能板上的面积更大,提高太阳能板的使用效果,进一步提高无人机巡航能力。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.当无人机到达巡逻区域后下落到地面,使履带与地面接触,然后旋翼停止工作,启动驱动件并带动主动辊轮转动,主动辊轮通过滑动摩擦带动履带和从动辊轮转动,使无人机在对巡逻区域进行巡逻,由于旋翼不进行工作仅依靠驱动件进行工作,使无人机整体的能耗降低,提高了无人机的巡航能力;
25.太阳能板可以将太阳转化为电能,提高无人机的巡航能力;
26.当无人机进行太阳能充电时,启动气缸,气缸的活塞杆带动太阳能板向远离机体的方向移动,使太阳能板伸出机体外,使太阳照射在太阳能板上的面积更大,提高太阳能板的使用效果,进一步提高无人机巡航能力。
附图说明
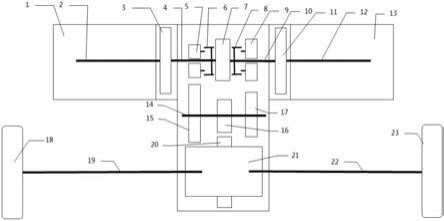
27.图1是本技术实施例的陆地巡航无人机的整体结构示意图。
28.图2是图1中a部分的局部放大示意图。
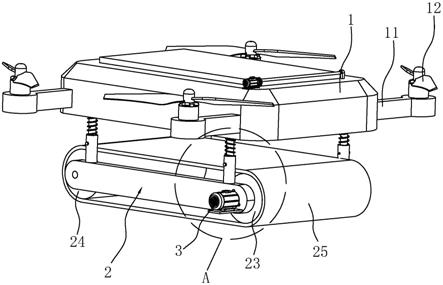
29.图3是本技术实施例的无人机打开太阳能板的整体结构示意图。
30.图4是图3中b部分的局部放大示意图。
31.附图标记说明:1、机体;11、机臂;12、螺旋桨;13、容纳槽;2、地面移动装置;21、支撑杆;211、内杆;212、外杆;22、安装架;23、主动辊轮;24、从动辊轮;25、履带;3、驱动件;31、第一伺服电机;4、弹性件;5、限位件;51、插销;52、穿孔;53、插孔;6、太阳能板;7、盖板;8、驱动装置;81、第二伺服电机;82、主动齿轮;83、从动齿轮;9、升降装置;91、气缸;92、导向伸缩杆。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.本技术实施例公开一种陆地巡航无人机。参照图1,陆地巡航无人机包括机体1、安装在机体1上的机臂11和转动安装在机臂11上的螺旋桨12。机体1的底部设有地面移动装置2。当无人机飞行到巡逻区域后下落到地面,然后使用地面移动装置2进行移动。
34.参照图1、图2,地面移动装置2包括若干个支撑杆21、主动辊轮23、从动辊轮24、履带25和两个安装架22。两个安装架22沿机架的长度方向对称安装在机架的两侧,每个支撑杆21沿竖直方向安装在机体1的底壁,支撑杆21的一端与机体1的底壁焊接、另一端与安装架22的顶壁焊接。主动辊轮23和从动辊轮24转动安装在两个安装架22的之间,且主动辊轮23和从动辊轮24沿机架的长度方向间隔安装在机架的两端。履带25连接在主动辊轮23和从动辊轮24上。安装架22上安装有用于驱使主动辊轮23转动的驱动件3,在本实施例中,驱动件3为第一伺服电机31,第一伺服电机31的输出轴与主动辊轮23同轴固定连接。无人机在地面上进行移动时,驱动件3带动主动辊轮23转动,主动辊轮23通过滑动摩擦带动履带25和从动辊轮24转动,从而使无人机在对巡逻区域进行巡逻,由于仅依靠无人机的驱动件3进行驱动,使无人机整体的能耗降低,提高了无人机的巡航能力。
35.在本实施例中,安装架22采用碳纤维材料制作而成。在其他实施例中,安装架22还可以为玻璃纤维或铝的材料制作而成。
36.在其他实施例中,第一伺服电机31也可以安装在机体1内,第一伺服电机31输出轴与一个齿轮同轴固定连接,主动辊轮23上固定有另一个齿轮,两个齿轮上连接有齿带,通过齿轮齿带的传动关系来驱使主动辊轮23转动。
37.参照图2,支撑杆21包括内杆211和外杆212,外杆212焊接在安装架22上,内杆211同轴滑动穿设在外杆212远离安装架22的一端,内杆211远离安装架22的一端与机体1焊接,内杆211上设有用于驱使内杆211远离安装架22的弹性件4。在本实施例中,弹性件4采用弹簧,弹簧的一端焊接在外杆212远离安装架22的一端,另一端可与机体1的底壁焊接,也可直接与机体1的底部抵接。当无人机在地面上进行巡逻遇到颠簸路段时,内杆211和外杆212之间发生相对位移,弹性件4有效阻碍内杆211向靠近外杆212的方向移动,使得机体1振动幅度减小,提高了无人机的减振效果,增加了无人机在地面移动的稳定性。
38.参照图2,为了方便对无人机进行收纳,外杆212上设有用于限制内杆211沿外杆
212的长度方向滑动的限位件5,在本实施例中,限位件5为插销51。外杆212上开设有穿孔52、内杆211上开设有与插销51适配的插孔53,插销51穿过外杆212的穿孔52并穿设在内杆211的插孔53内。当对无人机进行收纳时,工作人员将内杆211向靠近外杆212的方向移动,然后使用插销51穿过外杆212的穿孔52并穿设在内杆211的插孔53内,将内杆211沿外杆212的长度方向进行固定,有效减少了无人机的占用空间,方便收纳无人机。
39.在其他实施例中,限位件5也可以为螺栓,外杆212与螺栓螺纹连接,螺栓与抵接。
40.参照图3、图4,机体1的顶壁固定安装有太阳能板6,太阳能板6与无人机内置的电源进行电性连接。为了减少无人机在飞行时太阳能板6带来的风阻产生多余的能耗浪费,将太阳能板6内置在机体1内,在机体1的顶壁上开设有用于容纳太阳能板6的容纳槽13,太阳能板6通过螺栓固定安装在容纳槽13的底壁上。机体1的顶壁上转动安装有用于封闭容纳槽13的开口的盖板7,盖板7的活动端可向远离机体1的方向转动。机体1上安装有用于驱使盖板7转动的驱动装置8,驱动装置8包括第二伺服电机81、主动齿轮82和从动齿轮83,第二伺服电机81的输出轴与主动齿轮82同轴固定连接,从动齿轮83固定安装在盖板7与机体1之间的转动轴上,主动齿轮82和从动齿轮83啮合,第二伺服电机81通过螺栓固定安装在机体1内。当无人机到达地面后,启动第二伺服电机81,第二伺服电机81带动主动齿轮82转动,主动齿轮82通过齿轮啮合带动固定安装在盖板7与机体1之间的转动轴上的从动齿轮83转动,使盖板7与机体1之间发生相对转动,从而将容纳槽13的开口打开,使太阳能板6能够吸收太阳的能量,太阳能板6内置在机体1的容纳槽13内部,减少了无人机飞行时太阳能板6带来的风阻,有效提高了无人机的巡航能力。
41.在其他实施例中,盖板7也可以沿水平方向转动,盖板7的一端与机体1铰接,盖板7与机体1的铰接轴与从动齿轮83焊接,第二伺服电机81固定安装在机体1内部,第二伺服电机81的输出轴与主动齿轮82同轴固定连接,主动齿轮82和从动齿轮83啮合。
42.参照图3,为了进一步使太阳能板6更好的对太阳的能量进行吸收,容纳槽13的底壁上设有用于驱使太阳能板6沿竖直方向进行升降的升降装置9,升降装置9包括气缸91,气缸91焊接在容纳槽13的底壁上,气缸91的活塞杆与太阳能板6焊接。为了提高气缸91驱使太阳能板6沿竖直方向进行升降太阳能板6的稳定性,在太阳能板6的两端焊接有导向伸缩杆92,导向伸缩杆92的固定端焊接在容纳槽13的底壁上,导向伸缩杆92的活动端与太阳能板6焊接。当无人机进行太阳能充电时,启动气缸91,气缸91的活塞杆带动太阳能板6向远离机体1的方向移动,使太阳能板6伸出机体1外,使太阳照射在太阳能板6上的面积更大,提高太阳能板6的使用效果,进一步提高无人机巡航能力。
43.在本实施例中,可以在无人机的机体1上安装红外线检测设备、监控设备等信息采集设备。
44.本技术实施例一种陆地巡航无人机的实施原理为:当无人机到达巡逻区域后下落到地面,使履带25与地面接触,然后旋翼停止工作,启动第一伺服电机31,第一伺服电机31驱使主动辊轮23正反转,主动辊轮23通过滑动摩擦带动履带25和从动辊轮24转动,使无人机在对指定区域进行巡逻,由于旋翼不进行工作仅依靠驱动件3进行工作,使无人机整体的能耗降低,提高了无人机的巡航能力。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。