1.本实用新型属于汽车技术领域,更具体的说涉及一种六轮越野无人线控车辆。
背景技术:
2.近年来,随着汽车行业的发展,汽车从完全由驾驶员控制渐渐过渡到辅助驾驶。最近几年,汽车行业发展迅速,无人驾驶也渐渐出现在了人们面前,其中智能汽车大多是四轮车辆,单个电池。汽车的线控转向系统一般是由方向盘总成、转向执行总成和主控制器(ecu)三个主要部分以及自动防故障系统、电源等辅助系统组成。一般的线控转向系统是用传感器检测驾驶员的转向数据,通过数据总线将信号传递给ecu,并获得相应的反馈指令,从而控制转向轮的转向。用在汽车上的制动系统一般是液压形式的制动系统,液压线控制动系统是从传统的液压制动发展来的,其中用电子元件代替了部分机械元件;一般来说,液压式线控制动是由电子踏板、电子控制单元(ecu)、液压执行机构组成,踏板传感器获得踏板行程,然后将信号传递给ecu,实现对踏板行程和制动力的调控。
3.1.现有智能车辆大多为四轮车辆,驱动力较为有限;
4.2.现有的智能车辆车轮跳动行程小,在凹凸不平路面等坏路上行驶时,会出现碰撞底盘等情况,不能够顺利通过;
5.3.现有智能车辆转向方式单一,并且很难在狭窄路面掉头;
6.4.现有车辆工作环境及功能比较单一,不能很好的适应多种工作环境。
技术实现要素:
7.针对现有技术的不足,本实用新型提供了一种六轮驱动,驱动力足且稳定性高,可以在车架上安装载货车厢、座椅等设备,称为多种不同功能的车辆。
8.为实现上述目的,本实用新型提供了如下技术方案:一种六轮越野无人线控车辆,包括车架,所述车架上设置有前悬架系统和后悬架系统,前悬架系统和后悬架系统均连接有轮边系统,轮边系统由前至后依次为前轮、中轮和后轮,且前轮、中轮和后轮均包括轮毂电机,车架对应前悬架系统处还设置有转向系统,所述后悬架系统包括平衡臂和连接件,所述连接件的一端与车架通过轴承连接,且连接件与车架之间设置有后减震器,所述平衡臂的中部与连接件的另一端通过轴承连接,所述平衡臂的两端连接中轮和后轮。
9.进一步的所述后悬架系统还包括车架固定件,连接件通过车架固定件与车架连接,连接件与车架固定件之间通过轴承连接。
10.进一步的所述前悬架系统与轮边系统之间设置有羊角,所述悬架系统包括位于车架两侧的摆臂,摆臂一端连接车架,另一端连接羊角,转向系统的两端分别连接车架和羊角,所述前轮装于羊角上。
11.进一步的所述摆臂包括上摆臂和下摆臂,所述下摆臂与车架之间设置有第一减震器,车架两侧的下摆臂之间设置有第二减震器。
12.进一步的还包括如下控制系统:远程遥控装置、整车控制器、电子驻车制动系统、
电池管理系统、电动转向系统和制动控制器,所述远程遥控装置、电子驻车制动系统、电池管理系统、电动转向系统和制动控制器和轮毂电机均连接整车控制器。
13.进一步的所述车架上设置有三组电池,三组电池分别连接前轮、中轮和后轮,所述相邻两组电池之间设置有继电器。
14.与现有技术相比,本实用新型的有益效果是:六轮车的六轮驱动很好的解决了驱动力不足的问题,同时六轮车相比四轮车的稳定性更好,解决在不平路面的通过问题,在行驶过程中避免出现碰撞底盘等情况的发生,可以很好适用于多用工作环境,可以安装载货车厢,就成为了自动驾驶载货汽车;也可以安装座椅等设备,作为机场等场所的载客汽车使用;并且由于车辆具有相当大的跳动量,可以运用在探索地形等特殊路面及工况下,后悬架系统结构简单同时又能很好的起到避震的作用。
附图说明
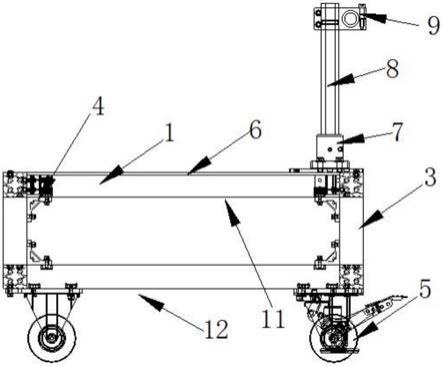
15.图1为本实用新型六轮越野无人线控车辆的立体结构图;
16.图2为后悬架系统与轮边系统连接时的立体结构图;
17.图3为后悬架系统的立体结构图;
18.图4为前悬架系统、转向系统和轮边系统的立体结构图;
19.图5为前悬架系统的立体结构图;
20.图6为转向系统的立体结构图;
21.图7为控制系统结构示意图;
22.图8为驾驶模式示意图;
23.图9为转向模式示意图;
24.图10为电池管理系统的真值表。
25.附图标记:1、车架;11、前悬架系统;12、后悬架系统;13、转向系统;21、前轮;22、中轮;23、后轮;32、轮毂电机;33、制动盘;34、制动卡钳;41、转向横拉杆;42、齿轮齿条转向器;43、转向滑块;44、转向滑轨;45、转向电机;51、第一减震器;52、下摆臂;53、羊角;54、上摆臂;55、第二减震器;61、平衡臂;62、轴承;64、后减震器;65、连接件;66、车架固定件。
具体实施方式
26.在本实用新型的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向(x)”、“纵向(y)”、“竖向(z)”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本实用新型的具体保护范围。
27.此外,如有术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明技术特征的数量。由此,限定有“第一”、“第二”特征可以明示或者隐含包括一个或者多个该特征,在本实用新型描述中,“数个”、“若干”的含义是两个或两个以上,除非另有明确具体的限定。
28.一种六轮越野无人线控车辆,包括车架1,所述车架1上设置有前悬架系统11和后
悬架系统12,前悬架系统11和后悬架系统12均连接有轮边系统,轮边系统由前至后依次为前轮21、中轮22和后轮 23,且前轮21、中轮22和后轮23均包括轮毂电机32,车架1对应前悬架系统11处还设置有转向系统13,所述后悬架系统12包括平衡臂61和连接件65,所述连接件65的一端与车架1通过轴承62连接,且连接件65与车架1之间设置有后减震器64,所述平衡臂61 的中部与连接件65的另一端通过轴承62连接,所述平衡臂61的两端连接中轮22和后轮23。
29.本实施例优选的所述后悬架系统12还包括车架固定件66,连接件65通过车架固定件66与车架1连接,连接件65与车架固定件66 之间通过轴承62连接。
30.在本实施例中六个车轮均为主动轮,轮胎和轮辋安装在轮毂电机 32外侧。
31.其中中轮22和后轮23连接于同一平衡臂61上,在中轮22和后轮23受到冲击后,可以将载荷通过轴承62传递到后减震器64,能够有效提高车辆的平顺性。
32.本实施例优选的所述前悬架系统11与轮边系统之间设置有羊角 53,所述悬架系统包括位于车架1两侧的摆臂,摆臂一端连接车架1,另一端连接羊角53,转向系统13的两端分别连接车架1和羊角53,所述前轮21装于羊角53上。
33.在本实施例中每个轮毂电机32上均具有制动盘33,在羊角53 和平衡臂61的吊耳上均具有制动卡钳34。
34.在本实施例中转向系统13优选的采用申请人在先申请,申请号为2021215402686,名称为一种小空间布置的转向机构的结构,其包括转向万向节,齿轮齿条转向器42和转向横拉杆41,所述转向万向节的一端与齿轮齿条转向器42的输入端连接,所述齿轮齿条转向器 42的输出端上设有刚性连接件65,且刚性连接件65处于输出端的上方,所述刚性连接件65上转动连接有转向横拉杆41,转向横拉杆41 相对刚性连接件65上下转动,所述转向横拉杆41远离刚性连接件 65一端转动连接有羊角53吊耳,羊角53吊耳相对转向横拉杆41朝刚性连接件65内外转动;所述刚性连接件65上设有转向滑块43,转向滑块43上设有与其配合的转向滑轨44,所述转向滑块43和转向滑轨44的滑动方向与齿轮齿条转向器42的输出方向一致;在本实施例中将齿轮齿条转向器42的输入端连接转向电机45,即整个转向系统13为电动转向系统13,其能够适应小空间布置转化系统车辆的布置需求,避免转向系统13与车辆其它部件产生干涉,同时能够适应车轮的大幅度跳动。
35.所述摆臂包括上摆臂54和下摆臂52,所述下摆臂52与车架1 之间设置有第一减震器51,车架1两侧的下摆臂52之间设置有第二减震器55。
36.本实施例优选的还包括如下控制系统:远程遥控装置、整车控制器、电子驻车制动系统、电池管理系统、电动转向系统13和数据库系统,所述远程遥控装置、电子驻车制动系统、电池管理系统、电动转向系统13和数据库系统和轮毂电机32均电连接整车控制器。
37.其中远程遥控装置包括遥控器和/或上位机。
38.在使用遥控器控制时,人员通过遥控器发送指令,指令传递给整车控制器,整车控制器将获得的指令处理后分别传力给电子驻车制动系统、六个轮毂电机32、电池管理系统、前轴系统和后轴系统的两个电动转向系统13的转向电机45和数据库系统,车辆进行相应的运动,并且电子驻车制动系统、六个轮毂电机32、电池管理系统、电动转向系统13的转向电机45和数据库系统将其运动状态反馈传递给整车控制器,利用pid控制来调节实际工况与指令之间的误差,同时车辆的运动工况传递给遥控器控制人员,控制人员通过反复调控遥
控器来达到符合控制人员意愿的车辆行驶工况。
39.在上位机控制时,上位机向整车控制器传递出运动信号,整车控制器将获得的信号处理后别传力给电子驻车制动系统、六个轮毂电机 32、电池管理系统、前轴系统和后轴系统的两个电动转向系统13的转向电机45和数据库系统,车辆进行相应的运动,并且电子驻车制动系统、六个轮毂电机32、电池管理系统、电动转向系统13的转向电机45和数据库系统将其运动状态反馈传递给整车控制器,利用pid 控制来调节实际工况与指令之间的误差,经过相对短暂的调控实现一个稳定的行驶状态。
40.本实施例优选的还包括如下车辆驾驶方法,自动驾驶或遥控驾驶,在自动驾驶时,任意系统报错或出现故障时,车辆进入零扭矩模式,同时进行制动,直至车辆停止;在遥控驾驶时,当车辆的远程遥控装置未连接或任意系统报错或出现故障时,车辆进入零扭矩模式,同时进行制动,直至车辆停止。
41.具体的无论是自动驾驶还是遥控驾驶,其均可采用整车车速控制、分布式转矩控制和分布式转速控制这三种对轮毂电机32的控制方式。
42.其中整车车速控制是对本实用新型车辆整车车速的控制,使其符合需要的行驶速度;分布式扭矩控制方式是根据需要分别对六个轮毂电机32的输出扭矩进行控制;分布式转速控制方式是根据需要分别对六个轮毂电机32的输出转速进行控制。
43.当本实用新型车辆处于自动驾驶状态时,此时车辆的iecu、急停开关、六个轮毂电机32报错或出现故障后,车辆进入零扭矩模式,同时制动系统产生1.5mpa的制动油压,使车辆减速直至停车,当没有出错时,通过判断语句使车辆进入行驶模式。
44.当本实用新型车辆处于遥控转速驾驶状态时,此时车辆的遥控器未连接或故障以及急停开关、六个轮毂电机32报错或出现故障后,车辆进入零扭矩模式,同时制动系统产生1.5mpa的制动油压,使车辆减速直至停车,当没有出错时,通过判断语句使车辆进入转速驾驶模式行驶。
45.当本实用新型车辆处于遥控转矩驾驶模式,此时车辆的遥控器未连接或故障以及急停开关、六个轮毂电机32报错或出现故障后,车辆进入零扭矩模式,同时制动系统产生1.5mpa的制动油压,使车辆减速直至停车,当没有出错时,通过判断语句使车辆进入转矩驾驶模式行驶。
46.在自动驾驶模式下,整车控制器根据需要向前轮21的电动转向电机45发送转弯信号,来实现转向功能。在遥控器驾驶模式下,车辆的转向模式主要有两种:前轮21阿克曼转向和前轮21差速转向。在前轮21阿克曼转向模式中,前轮21电动转向电机45接收到转向信号,内侧车轮的转向角比外侧轮的转向角大3度左右。在前轮21 差速转向模式中,左右车轮接收到不同的转速信号,通过使左右车轮产生转速差来完成转向。
47.本实施例优选的所述车架1上设置有三组电池,三组电池分别连接前轮21、中轮22和后轮23,所述相邻两组电池之间设置有继电器。
48.其中继电器可以设置有三个,即任意两组电池之间均具有继电器,为了优化控制算法及简化判断逻辑,本实施例采用两个继电器,且下述内容以采用两个继电器为例。
49.如图10所示,本实施例中采用三个72伏的电池、两个继电器来实现该车辆的冗余供电技术。其中继电器r1、r2分别在电池ab和电池bc之间;真值表中电池abc的0代表电池亏电或损坏,电池abc 的1代表电池正常供电。
50.在三个电池均可正常供电的时候,电池a为前轮21两个电机及其他耗电部件进行供电,电池b为中轮22两个电机供电,电池c为后轮23两个电机供电。电池abc状态为000时,此时电池均没电,继电器r1、r2关闭;电池abc状态为001时,此时电池c有电,继电器r1、r2打开,电池c为电池ab所供电部件供电;电池abc状态为010时,此时电池b有电,继电器r1、r2打开,电池b为电池ac 所供电部件供电;电池abc状态为100时,此时电池a有电,继电器 r1、r2打开,电池a为电池bc所供电部件供电;电池abc状态为011 时,此时电池bc有电,继电器r1打开r2关闭,电池b为电池a所供电部件供电;电池abc状态为101时,此时电池ac有电,继电器 r1打开r2关闭,电池a为电池b所供电部件供电;电池abc状态为 110时,此时电池ab有电,继电器r2打开r1关闭,电池b为电池c 所供电部件供电;电池abc状态为111时,此时电池abc均有电,继电器r1、r2关闭。电池a的状态0用表示,状态1用a表示;同理电池b的状态0用表示,状态1用b表示;电池c的状态0用表示,状态1用c表示。因此在r1打开时的逻辑为在r2打开时的逻辑为通过判断r1、r2是否打开来实现本实用新型的冗余供电。
51.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。