1.本实用新型属于建设工程边坡监测验收技术领域,具体涉及一种边坡测量检测仪器。
背景技术:
2.边坡是建设工程项目中见到较多的一个词语,边坡(side slope)指的是为保证路基稳定,在路基两侧做成的具有一定坡度的坡面。按成因分类:可分为人工边坡和自然边坡;按使用年限分类:可分为永久性边坡和临时性边坡。边坡事故也是建设工程中出现较多的一种事故,针对边坡的监控方式一般是进行坡比验收和位移沉降监测。
3.现有技术中,对于坡比验收仍是传统办法,即采用卷尺测量坡面的垂直高度和水平宽度然后计算两个之比,故通常需要测量人员进行人工测量计算,工作量较大,降低了坡比验收的便利性和准确性,对于坡比验收把控都不严谨,而且且人员测量时因为活动范围较大,存在一定的安全隐患。
技术实现要素:
4.本实用新型实施例提供一种边坡测量检测仪器,旨在能够解决现有的坡比监测方式准确性及安全性差的问题。
5.为实现上述目的,本实用新型采用的技术方案是:提供一种边坡测量检测仪器,包括:
6.底座,用于安置在边坡旁的地面上;
7.承载平台,位于所述底座的上方;所述承载平台上设有电子水平仪;
8.伸缩结构,至少设有三个,各所述伸缩结构均设置在所述底座和所述承载平台之间,且各所述伸缩结构均沿着竖直方向设置;每个所述伸缩结构的固定端与所述底座相连接,伸缩端与所述承载平台球角连接,各所述伸缩结构用于共同对所述承载平台的水平度进行调节;
9.图像传感器,设置在所述承载平台上,用于拍摄边坡的图像,以选取各待测点;
10.拍摄组件,设置在所述承载平台上,用于在选取边坡上各待测点后,俯仰转动,且分别对正并拍摄边坡上待测点;
11.红外测距仪,设置在所述拍摄组件上,用于测量拍摄组件至各边坡上待测点位置的直线距离;
12.显示输入模块,设置在所述承载平台上;以及
13.配套的控制器,分别与所述电子水平仪、所述伸缩结构、所述图像传感器、所述拍摄组件,所述红外测距仪及所述显示输入模块电性连接;所述控制器根据对各个待测点至所述拍摄组件的距离数据及所述拍摄组件的转角数据,获得边坡的坡比。
14.在一种可能的实现方式中,所述承载平台包括:
15.安装座,设置在所述底座的上方;所述拍摄组件、所述显示输入模块及所述控制器
均设置在所述安装座上;以及
16.关节轴承,设有多个,各所述关节轴承均设置在所述安装座底部,且与各所述伸缩结构一一对应设置;每个所述关节轴承具有外圈和与所述外圈适配的内圈,所述外圈与所述安装座固定连接,所述内圈与对应的所述伸缩结构的伸缩端固定连接。
17.一些实施例中/示例性的/举例说明,所述底座为圆形板体;
18.各所述伸缩结构绕着所述底座的中轴线呈环形且间隔设置。
19.一些实施例中/示例性的/举例说明,所述安装座上设有斜面,所述显示输入模块嵌装在所述斜面上。
20.在一种可能的实现方式中,所述拍摄组件包括外壳、摄像头、驱动器及绝对值编码器;所述外壳设置在所述安装座的顶端,且在所述外壳中设有转腔,并在所述外壳的侧壁上设有与所述转腔连通的敞口;所述敞口沿着竖直方向设置;所述摄像头具有基座及镜头,所述基座转动设置在所述转腔中,所述镜头伸出所述敞口;所述驱动器固设在所述安装座上,且与所述控制器电性连接,所述驱动器的动力输出端与所述基座动力连接,用于驱动所述摄像头俯仰转动;所述绝对值编码器设置在所述驱动器的动力输出端及所述基座支架,用于测定所述摄像头的俯仰转动角度。
21.一些实施例中/示例性的/举例说明,所述转腔为圆柱形腔,且中轴线水平设置;
22.所述基座为与所述转腔适配的圆柱形外形结构。
23.在一种可能的实现方式中,所述边坡测量检测仪器还包括gps模块,所述gps模块设置在所述承载平台上,且与所述控制器电性连接,用于对边坡的待测位置点坐标进行测定。
24.本实现方式/申请实施例中,设置了底座,能够放置在不平整的地面上,通过伸缩结构能够补偿由地面带来的不平整度,调节承载平台的水平度,进而保证测量的准确性。图像传感器及显示输入模块,能够实时对边坡的环境图像在显示输入模块上显示,而且能够对待测位置点进行选定,拍摄组件能够带动红外测距仪对待测位置点与拍摄组件间的距离进行测量,通过对长度及角度的准确测量,最终得到准确的坡比,该种结构实现了数据的可视化,改变了以往人力测量的方式,其更具便捷性,能够减轻工作人员的工作量,安全系数更高,并且通过智能计算,能够提高测定的精度。
附图说明
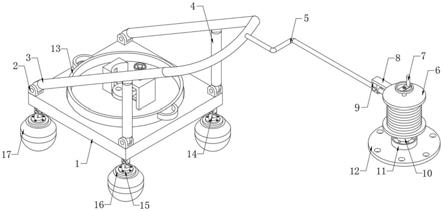
25.图1为本实用新型实施例提供的边坡测量检测仪器的结构示意图一;
26.图2为本实用新型实施例提供的边坡测量检测仪器的结构示意图二;
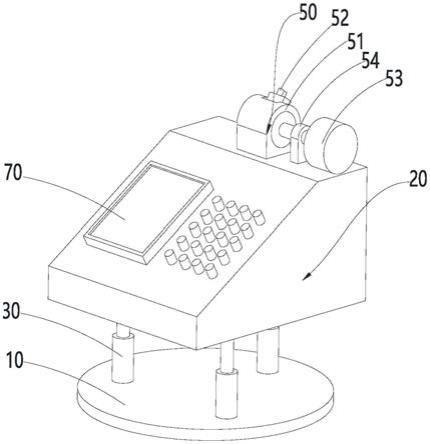
27.图3为本实用新型实施例提供的边坡测量检测仪器的主视结构示意图;
28.附图标记说明:
29.10、底座;20、承载平台;21、安装座;22、关节轴承;30、伸缩结构;40、图像传感器;50、拍摄组件;51、外壳;52、摄像头;53、驱动器;54、绝对值编码器;60、红外测距仪;70、显示输入模块。
具体实施方式
30.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以
下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
31.请一并参阅图1至图3,现对本实用新型提供的边坡测量检测仪器进行说明。所述边坡测量检测仪器,包括底座10、承载平台20、伸缩结构30、图像传感器40、拍摄组件50、红外测距仪60、显示输入模块70以及配套的控制器。其中,底座10用于安置在边坡旁的地面上。承载平台20位于底座10的上方;承载平台20上设有电子水平仪。伸缩结构30至少设有三个,各伸缩结构30均设置在底座10和承载平台20之间,且各伸缩结构30均沿着竖直方向设置。每个伸缩结构30的固定端与底座10相连接,伸缩端与承载平台20球角连接,各伸缩结构30用于共同对承载平台20的水平度进行调节。
32.图像传感器40设置在承载平台20上,用于拍摄边坡的图像,并挑选各位置点。拍摄组件50设置在承载平台20上,用于在选取边坡上各待测点后,对正并拍摄边坡上各待测点。红外测距仪60设置在拍摄组件50上,用于测量拍摄组件50至边坡上各待测点位置的直线距离;显示输入模块70设置在承载平台20上。
33.本实施例提供的边坡测量检测仪器的工作原理为:首先,将底座10置于边坡旁的地面上,该位置可自由选择;通过电子水平尺测定承载平台20的水平度,并将数据传递给控制器,控制器控制各伸缩结构30升降,以将承载平台20的调节至水平放置。此时,图像传感器40将边坡的图像传递至控制器,且在显示输入模块70的显示屏上实时显示,工作人员对边坡上的待检测的位置点进行选择,即坡脚及坡顶点。拍摄组件50对正待检测的位置点,并且通过红外测距仪60对拍摄组件50至待检测的位置点间的距离进行测量,通过测量的距离及红外测距仪60的旋转角度,并且结合三角函数,求得边坡的坡比。
34.需要说明的是,伸缩结构30可为伸缩气缸,各伸缩气缸均独立工作。本方案中的电力来源为太阳能,在承载平台20中设有电池,并且还设有太阳能电池板。控制器具有数据处理功能,并具有无线传输功能,能够将数据传输到云盘或者移动设备上。
35.本实施例提供的边坡测量检测仪器,与现有技术相比,设置了底座10,能够放置在不平整的地面上,通过伸缩结构30能够补偿由地面带来的不平整度,调节承载平台20的水平度,进而保证测量的准确性。图像传感器40及显示输入模块70,能够实时对边坡的环境图像在显示输入模块70上显示,而且能够对待测位置点进行选定,拍摄组件50能够带动红外测距仪60对待测位置点与拍摄组件50间的距离进行测量,通过对长度及角度的准确测量,最终得到准确的坡比,该种结构实现了数据的可视化,改变了以往人力测量的方式,其更具便捷性,能够减轻工作人员的工作量,安全系数更高,并且通过智能计算,能够提高测定的精度。
36.在一些实施例中,上述承载平台20可以采用如图3所示结构。参见图3,承载平台20包括安装座21以及关节轴承22。其中,安装座21设置在底座10的上方;拍摄组件50、显示输入模块70及控制器均设置在安装座21上。关节轴承22设有多个,各关节轴承22均设置在安装座21底部,且与各伸缩结构30一一对应设置;每个关节轴承22具有外圈和与外圈适配的内圈,外圈与安装座21固定连接,内圈与对应的伸缩结构30的伸缩端固定连接。安装座21通过关节轴承22与各伸缩结构30相连接,关节轴承22的设置,可防止各个伸缩结构30独立工作后,因固定连接而导致安装座21无法进行水平调节。关节轴承22的设置,能够保证每个伸缩结构30的伸缩端与安装座21均能够万向转动,在对安装座21进行支撑的同时,还保证了
安装座21的灵活调节,结构简单,实用性强。
37.需要说明的是,伸缩结构30还可设置为多个,例如四个。
38.在一些实施例中,上述底座10可以采用如图1所示结构。参见图1,底座10为圆形板体。各伸缩结构30绕着底座10的中轴线呈环形且间隔设置。圆形板体能够便于制作,并且能够防止因搬运转移划伤工作人员。而且该种结构可便于对伸缩结构30的设置,保证安装座21的受力稳定性。
39.在一些实施例中,上述安装座21可以采用如图1所示结构。参见图1,安装座21上设有斜面,显示输入模块70嵌装在斜面上。斜面的设置,可更适应工作人员的查看及操作,能够在一定程度上保证工作人员的舒适度。
40.在一些实施例中,上述拍摄组件50可以采用如图1所示结构。参见图1,拍摄组件50包括外壳51、摄像头52、驱动器53及绝对值编码器54;外壳51设置在安装座21的顶端,且在外壳51中设有转腔,并在外壳51的侧壁上设有与转腔连通的敞口;敞口沿着竖直方向设置;摄像头52具有基座及镜头,基座转动设置在转腔中,镜头伸出敞口;驱动器53固设在安装座21上,且与控制器电性连接,驱动器53的动力输出端与基座动力连接,用于驱动摄像头52俯仰转动。通过旋转的摄像头52可适应不同高度的待测位置点,进而保证安装座21不变的情况下对不同的待测位置点进行测定,保证测定的效果。驱动器53可为伺服电机,并且在驱动器53与基座之间设置绝对比编码器,以测定镜头的俯仰转角。
41.在一些实施例中,上述转腔可以采用如图2所示结构。参见图2,转腔为圆柱形腔,且中轴线水平设置。基座为与转腔适配的圆柱形外形结构。该种结构可保证摄像头52的俯仰转动,进而保证测量的效果及测量的准确性。
42.在一些实施例中,边坡测量检测仪器还包括gps模块,gps模块设置在承载平台20上,且与控制器电性连接,用于对边坡的待测位置点坐标进行测定。gps模块可辅助待测位置点的准确确定,进而能够进一步提升坡比测定的准确性。gps模块与绝对值编码器54可设置其中一个,也可同时设置。
43.本方案具体工作方式:首先根据图像传感器40传回的图像,确定坡顶待测点a及坡脚待测点b,并且通过gps模块确定点a和点b的坐标。红外测距仪60分别对至a点和至b点的距离进行测量,且分别得到l1和l2,绝对值编码器54测定的角度θ。通过l1、l2及θ,结合三角函数,测出边坡的角度,边坡角度的正切值即为坡比。
44.本方案还可以首先在边坡上标记两个或多个坐标点,通过图像传感器40和gps模块确定各个点的坐标,通过控制器自动创建坐标轴,并计算各点位之间的距离,实现远距离测量边坡上的距离。
45.本方案还适用于位移沉降监测,首先在边坡上标记几个点,并通过图像传感器40和gps确定各个点的坐标,在显示输入模块70中输入间隔时间,随着时间的推进,间隔对各个点位进行复测,以实现边坡的位移沉降监测功能。
46.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。