技术特征:
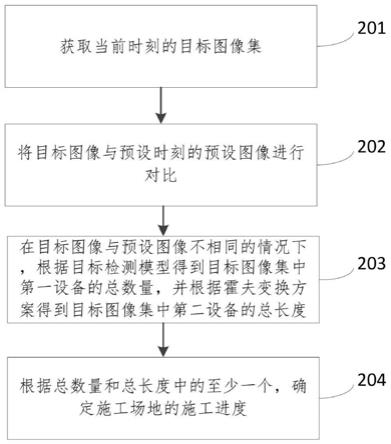
1.一种施工进度的确定方法,其特征在于,所述方法包括:获取当前时刻的目标图像集,其中,所述目标图像集中包括至少一张目标图像,所述目标图像中包含至少部分施工场地;将所述目标图像与预设时刻的预设图像进行对比,其中,所述当前时刻与所述预设时刻之间的时刻差值大于预设差值,所述目标图像对应的施工场地区域与所述预设图像对应的施工场地区域相同;在所述目标图像与所述预设图像不相同的情况下,根据目标检测模型得到所述目标图像集中第一设备的总数量,并根据霍夫变换方案得到所述目标图像集中第二设备的总长度;根据所述总数量和所述总长度中的至少一个,确定所述施工场地的施工进度。2.根据权利要求1所述的方法,其特征在于,获取当前时刻的目标图像集包括:在所述施工场地为室外施工场地的情况下,通过微型飞行器获取所述室外施工场地的多张第一图像,并确定所述微型飞行器的拍摄结束时刻;在所述施工场地为室内施工场地的情况下,通过拍摄装置获取所述拍摄结束时刻的所述室内施工场地的第二图像;将所述多张第一图像和所述第二图像作为所述目标图像集。3.根据权利要求2所述的方法,其特征在于,通过微型飞行器获取所述室外施工场地的多张第一图像包括:获取所述微型飞行器发送的初始视频,其中,所述初始视频包含所述室外施工场地,所述室外施工场地上设置有多张等间距的标志位;按照所述标志位将所述初始视频划分为多张初始图像,其中,所述初始图像的两端均包含一个标志位;根据所述标志位在所述初始图像中的尺寸和位置,对所述初始图像进行图像变换,以使所述标志位的尺寸一致且位置对齐;删除初始图像中所述标志位与图像边缘之间的图像,得到第一图像,其中,两个标志位之间的连线与所述第一图像边缘呈垂直夹角。4.根据权利要求1所述的方法,其特征在于,所述根据目标检测模型得到所述目标图像集中第一设备的总数量包括:将所述目标图像输入目标检测模型,得到所述目标检测模型输出的所述目标图像中的第一设备,其中,所述第一设备为所述目标图像中预设类型的设备;确定所述目标图像中第一设备的设备数量;将每张所述目标图像对应的设备数量进行加和,得到所述目标图像集中第一设备的总数量。5.根据权利要求1所述的方法,其特征在于,所述根据霍夫变换方案得到所述目标图像集中第二设备的总长度包括:通过霍夫变换方案确定所述目标图像中第二设备的边缘长度,其中,所述第二设备的边缘形状为直线;通过透视标定,根据所述边缘长度确定所述第二设备的实际长度;将每张所述目标图像中第二设备的实际长度进行加和,得到所述目标图像集中第二设
备的总长度。6.根据权利要求5所述的方法,其特征在于,通过霍夫变换方案确定所述目标图像中第二设备的边缘长度包括:在检测到所述目标图像中的背景复杂度大于复杂度阈值的情况下,将所述目标图像输入语义分割模型,得到所述语义分割模型输出的第二设备的检测框;根据所述检测框,将所述第二设备的图像从所述目标图像中切分出来;通过霍夫变换方案确定每张所述第二设备的图像中第二设备的边缘长度;或,在检测到所述目标图像中的背景复杂度不大于复杂度阈值的情况下,通过霍夫变换方案确定每张所述目标图像中第二设备的边缘长度。7.根据权利要求1所述的方法,其特征在于,将所述目标图像与预设时刻的预设图像进行对比之后,所述方法还包括:在所述目标图像与所述预设图像相同的情况下,确定所述目标图像对应的施工场地区域;发出第一警示信息,其中,所述第一警示信息用于指示所述目标图像对应的施工场地区域长时间未发生变化;所述方法还包括:若所述当前时刻为工作时刻,通过人员检测模型检测到所述施工场地是否存在人员;在所述施工场地存在人员的情况下,发出第二警示信息,其中,所述第二警示信息用于指示所述施工场地在工作时刻不存在人员。8.一种施工进度的确定装置,其特征在于,所述装置包括:获取模块,用于获取当前时刻的目标图像集,其中,所述目标图像集中包括至少一张目标图像,所述目标图像中包含至少部分施工场地;对比模块,用于将所述目标图像与预设时刻的预设图像进行对比,其中,所述当前时刻与所述预设时刻之间的时刻差值大于预设差值,所述目标图像对应的施工场地区域与所述预设图像对应的施工场地区域相同;得到模块,用于在所述目标图像与所述预设图像不相同的情况下,根据目标检测模型得到所述目标图像集中第一设备的总数量,并根据霍夫变换方案得到所述目标图像集中第二设备的总长度;确定模块,用于根据所述总数量和所述总长度中的至少一个,确定所述施工场地的施工进度。9.一种电子设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现权利要求1-7任一所述的方法步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7任一所述的方法步骤。
技术总结
本申请提供了一种施工进度的确定方法、装置、电子设备和可读介质。方法包括:获取当前时刻的目标图像集,其中,目标图像集中包括至少一张目标图像,目标图像中包含至少部分施工场地;将目标图像与预设时刻的预设图像进行对比,其中,当前时刻与预设时刻之间的时刻差值大于预设差值,目标图像对应的施工场地区域与预设图像对应的施工场地区域相同;在目标图像与预设图像不相同的情况下,根据目标检测模型得到目标图像集中第一设备的总数量,并根据霍夫变换方案得到目标图像集中第二设备的总长度;根据总数量和总长度中的至少一个,确定施工场地的施工进度。本申请提高了施工进度确定的准确性,保障了人身安全。保障了人身安全。保障了人身安全。
技术研发人员:丁皓 丁宏翔 沙周凤
受保护的技术使用者:苏州方兴信息技术有限公司
技术研发日:2021.12.13
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。