技术特征:
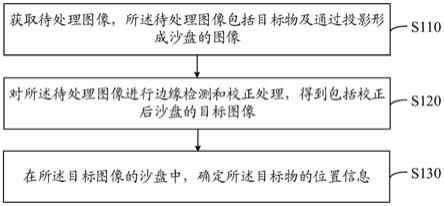
1.一种在沙盘中进行定位的方法,其特征在于,包括:获取待处理图像,所述待处理图像包括目标物及通过投影形成沙盘的图像;对所述待处理图像进行边缘检测和校正处理,得到包括校正后沙盘的目标图像;在所述目标图像的沙盘中,确定所述目标物的位置信息。2.根据权利要求1所述的方法,其特征在于,所述对所述待处理图像进行边缘检测和校正处理,得到包括校正后沙盘的目标图像,包括:对所述待处理图像进行边缘提取,得到沙盘边界框;对所述沙盘边界框内的图像进行校正处理,得到包括校正后沙盘的目标图像。3.根据权利要求2所述的方法,其特征在于,所述对所述待处理图像进行边缘提取,得到沙盘边界框,包括:至少对所述待处理图像进行高斯模糊处理、二值化处理,得到二值图像;基于所述二值图像,对所述待处理图像进行边缘提取,得到至少一个多边形;提取面积最大或边长最长的多边形作为沙盘边界框。4.根据权利要求2所述的方法,其特征在于,所述对所述沙盘边界框内的图像进行校正处理,得到包括校正后沙盘的目标图像,包括:获取所述沙盘边界框的顶点坐标;基于所述边界框的顶点坐标和预设的成像大小,确定目标图像的顶点坐标;基于所述边界框的顶点坐标和所述目标图像的顶点坐标,确定变换矩阵;基于所述变换矩阵,对所述沙盘边界框内的图像进行校正处理,得到包括校正后沙盘的目标图像。5.根据权利要求1至4任一项所述的方法,其特征在于,所述在所述目标图像的沙盘中,确定所述目标物的位置信息,包括:基于深度神经网络模型对所述目标图像进行目标识别,获取包围所述目标物的检测框;获取所述检测框的顶点的坐标;基于所述检测框的顶点的坐标,确定所述目标图像的沙盘中所述目标物的位置。6.根据权利要求5所述的方法,其特征在于,所述目标物为移动机器人,所述方法还包括:在所述目标图像的沙盘中,确定所述移动机器人的航向角;至少基于所述航向角和所述位置信息,确定所述移动机器人的移动指令。7.根据权利要求6所述的方法,其特征在于,所述检测框的顶点包括左上角顶点、右上角顶点、左下角顶点和右下角顶点,所述在所述目标图像的沙盘中,确定所述移动机器人的航向角,包括:基于所述左上角顶点的坐标和所述右上角顶点的坐标,确定位于所述左上角顶点和所述右上角顶点之间连线的第一中心点;基于所述左下角顶点的坐标和所述右下角顶点的坐标,确定位于所述左下角顶点和所述右下角顶点之间连线的第二中心点;基于所述第一中心点的坐标和所述第二中心点的坐标,确定所述移动机器人的航向角。
8.一种在沙盘中进行定位的系统,其特征在于,包括:投影模组,用于在目标场地投影形成沙盘;图像采集模组,用于采集待处理图像,所述待处理图像包括目标物及通过投影形成沙盘的图像;所述目标物,用于对所述待处理图像进行边缘检测和校正处理,得到包括校正后沙盘的目标图像;在所述目标图像的沙盘中,确定所述目标物的位置信息。9.一种在沙盘中进行定位的装置,其特征在于,包括:获取模块,用于获取待处理图像,所述待处理图像包括目标物及通过投影形成沙盘的图像;处理模块,用于对所述待处理图像进行边缘检测和校正处理,得到包括校正后沙盘的目标图像;第一确定模块,用于在所述目标图像的沙盘中,确定所述目标物的位置信息。10.一种电子设备,其特征在于,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1至7任一项所述方法中的步骤。11.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,该计算机程序被处理器执行时实现权利要求1至7中任一项所述方法中的步骤。
技术总结
本申请实施例提供一种在沙盘中进行定位的方法、装置、设备、存储介质。其中,所述方法包括:获取待处理图像,所述待处理图像包括目标物及通过投影形成沙盘的图像;对所述待处理图像进行边缘检测和校正处理,得到包括校正后沙盘的目标图像;在所述目标图像的沙盘中,确定所述目标物的位置信息。所述目标物的位置信息。所述目标物的位置信息。
技术研发人员:陈亦鹏
受保护的技术使用者:上海商汤智能科技有限公司
技术研发日:2021.11.29
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。