1.本发明属于轨道交通技术领域,具体涉及一种既有线路的钢轨点云提取方法。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,轨道交通技术已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保障轨道交通的安全稳定运行,就成为了轨道交通系统最重要的任务之一。
3.钢轨点云提取技术是轨道交通技术的重要组成部分,其能够应用于轨道建模、轨道测量、轨道养护维修、铁路限界建模等方面。钢轨点云提取技术能够有效提高铁路作业效率、减少人工线上时间,为工人安全提供了保障。在铁路走廊的激光雷达点云扫描中,精确识别钢轨的位置形态尤为重要,因此如何提高点云识别精度就成为了该领域的研究重点。
4.现有的主流钢轨点云提取方法,主要分为两种:第一种方法是从含有点云激光强度的点云中,依据点云激光强度和点云之间的距离聚类识别钢轨点云;但是,该种方法一般采用近景图片像素提取方式,这种方式常常需要人工干预识别过程,自动化识别程度低,有着较长的处理周期,而且无法解决杂草灌木对铁路的遮盖问题,存在精度不足且易受铁路周围环境影响等缺陷。第二种方法是从不包含点云激光的强度的点云中,依据钢轨的几何特征提取,首先利用最小二乘法拟合确定钢轨中心线,再依据轨道轨距等几何信息识别钢轨点云;但是该种方法提取过程单一,而且对于建设在郊外的正线铁路,由于周围往往有杂草、树木、石块等非钢轨数据,所以导致该方法提取的线路中心线并不精确,进而使得最终的钢轨点云提取结果的可靠性和精确性较差。
技术实现要素:
5.本发明的目的在于提供一种可靠性高、精确性好且提取效果较好的既有线路的钢轨点云提取方法。
6.本发明提供的这种既有线路的钢轨点云提取方法,包括如下步骤:
7.s1.获取既有线路的pcd格式文件;
8.s2.根据步骤s1获取的pcd格式文件,得到既有线路的钢轨点云数据;
9.s3.对当前的钢轨点云数据进行中心线拟合,得到当前钢轨点云的中心线;
10.s4.对中心线的两侧的钢轨点云数据进行分离;
11.s5.针对中心线两侧的钢轨点云数据,剔除偏离中心线距离大于偏离设定值的非钢轨点云数据,得到中心线两侧的剔除非钢轨点云数据后的点云数据;
12.s6.合并中心线两侧的剔除非钢轨点云数据后的点云数据,得到新的钢轨点云数据,并作为当前的钢轨点云数据;
13.s7.重复步骤s3~s6,每次重复时均重新设定偏离设定值,直至满足设定的停止条件,从而得到最终的既有线路的钢轨点云提取结果。
14.步骤s3所述的对当前的钢轨点云数据进行中心线拟合,得到当前钢轨点云的中心
线,具体包括如下步骤:
15.若为第1次对中心线进行拟合,则采用最小二乘法对当前的钢轨点云数据进行中心线拟合,得到当前钢轨点云的中心线;其中,中心线的斜率为k1,中心线的截距为b1;
16.若为第z 1次对中心线进行拟合,则保持中心线的斜率为kz,并计算第z 1次拟合时的中心线截距b
z 1
为式中bz为第z次对中心线进行拟合时计算得到的中心线截距;d
ave-l-z
为第z次非钢轨点云数据剔除操作时计算得到的中心线左侧的各个点云数据到中心线的平均距离;d
ave-r-z
为第z次非钢轨点云数据剔除操作时计算得到的中心线右侧的各个点云数据到中心线的平均距离;θz为第z次拟合得到的中心线与x轴的夹角;z为正整数。
17.步骤s5所述的针对中心线两侧的钢轨点云数据,剔除偏离中心线距离大于偏离设定值的非钢轨点云数据,得到中心线两侧的剔除非钢轨点云数据后的点云数据,具体包括如下步骤:
18.针对第z次的非钢轨点云数据剔除操作:
19.对于中心线左侧的点云数据,计算各个点云数据i到中心线的距离d
i-z
,以及各个点云数据到中心线的平均距离d
ave-l-z
;然后采用如下标准剔除非钢轨点云数据:若d
i-z
≥ρ
l-z
·dave-l-z
,则剔除对应的点云数据i;剩余未被剔除的点云数据为中心线左侧的剔除非钢轨点云数据后的点云数据;ρ
l-z
为左侧钢轨点云剔除参数,且ρ
l-z
>1;
20.对于中心线右侧的点云数据,计算各个点云数据j到中心线的距离d
j-z
,以及各个点云数据到中心线的平均距离d
ave-r-z
;然后采用如下标准剔除非钢轨点云数据:若d
j-z
≥ρ
r-z
·dave-r-z
,则剔除对应的点云数据j;剩余未被剔除的点云数据为中心线右侧的剔除非钢轨点云数据后的点云数据;ρ
r-z
为右侧钢轨点云剔除参数,且ρ
r-z
>1。
21.步骤s7所述的每次重复时均重新设定偏离设定值,具体为每次重复时,均重新设定左侧钢轨点云剔除参数ρ
l-z
和右侧钢轨点云剔除参数ρ
r-z
,且ρ
l-z
>1和ρ
r-z
>1。
22.步骤s7所述的设定的停止条件,具体为采用如下规则作为停止条件:
23.若|b
z 1-bz|
·
cosθz<α,则认定满足设定的停止条件;式中b
z 1
为第z 1次对中心线进行拟合时计算得到的中心线截距;bz为第z次对中心线进行拟合时计算得到的中心线截距;θz为第z次拟合得到的中心线与x轴的夹角;α为设定的停止阈值参数;z为正整数。
24.本发明提供的这种既有线路的钢轨点云提取方法,通过创新的算法设计和参数设计,不仅实现了既有线路的钢轨点云提取,而且提取结果比现有的最小二乘法拟合提取的结果更加优秀,而且本发明方法的可靠性更高、精确性更好,提取效果更好。
附图说明
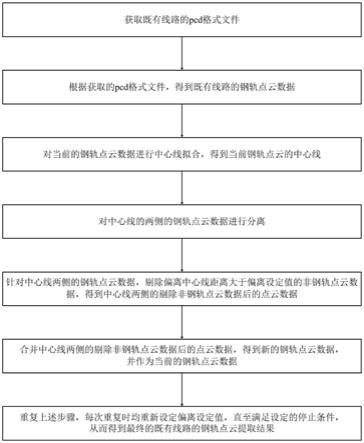
25.图1为本发明方法的方法流程示意图。
26.图2为本发明方法的实施例中采用本发明方法分类识别后的点云数据示意图。
27.图3为本发明方法的实施例中手动提取的钢轨点云数据示意图。
28.图4为发明方法的实施例的钢轨点云到中心线距离的直方分布示意图。
具体实施方式
29.如图1所示为本发明方法的方法流程示意图:本发明提供的这种既有线路的钢轨点云提取方法,包括如下步骤:
30.s1.获取既有线路的pcd格式文件;
31.s2.根据步骤s1获取的pcd格式文件,得到既有线路的钢轨点云数据;
32.s3.对当前的钢轨点云数据进行中心线拟合,得到当前钢轨点云的中心线;具体包括如下步骤:
33.若为第1次对中心线进行拟合,则采用最小二乘法对当前的钢轨点云数据进行中心线拟合,得到当前钢轨点云的中心线;其中,中心线的斜率为k1,中心线的截距为b1;
34.若为第z 1次对中心线进行拟合,则保持中心线的斜率为kz,并计算第z 1次拟合时的中心线截距b
z 1
为式中bz为第z次对中心线进行拟合时计算得到的中心线截距;d
ave-l-z
为第z次非钢轨点云数据剔除操作时计算得到的中心线左侧的各个点云数据到中心线的平均距离;d
ave-r-z
为第z次非钢轨点云数据剔除操作时计算得到的中心线右侧的各个点云数据到中心线的平均距离;θz为第z次拟合得到的中心线与x轴的夹角;z为正整数;
35.s4.对中心线的两侧的钢轨点云数据进行分离;
36.s5.针对中心线两侧的钢轨点云数据,剔除偏离中心线距离大于偏离设定值的非钢轨点云数据,得到中心线两侧的剔除非钢轨点云数据后的点云数据;具体包括如下步骤:
37.针对第z次的非钢轨点云数据剔除操作:
38.对于中心线左侧的点云数据,计算各个点云数据i到中心线的距离d
i-z
,以及各个点云数据到中心线的平均距离d
ave-l-z
;然后采用如下标准剔除非钢轨点云数据:若d
i-z
≥ρ
l-z
·dave-l-z
,则剔除对应的点云数据i;剩余未被剔除的点云数据为中心线左侧的剔除非钢轨点云数据后的点云数据;ρ
l-z
为左侧钢轨点云剔除参数,且ρ
l-z
>1;
39.对于中心线右侧的点云数据,计算各个点云数据j到中心线的距离d
j-z
,以及各个点云数据到中心线的平均距离d
ave-r-z
;然后采用如下标准剔除非钢轨点云数据:若d
j-z
≥ρ
r-z
·dave-r-z
,则剔除对应的点云数据j;剩余未被剔除的点云数据为中心线右侧的剔除非钢轨点云数据后的点云数据;ρ
r-z
为右侧钢轨点云剔除参数,且ρ
r-z
>1;
40.s6.合并中心线两侧的剔除非钢轨点云数据后的点云数据,得到新的钢轨点云数据,并作为当前的钢轨点云数据;
41.s7.重复步骤s3~s6,每次重复时均重新设定偏离设定值,直至满足设定的停止条件,从而得到最终的既有线路的钢轨点云提取结果;
42.具体实施时,每次重复时,均重新设定左侧钢轨点云剔除参数ρ
l-z
和右侧钢轨点云剔除参数ρ
r-z
,且ρ
l-z
>1和ρ
r-z
>1;其中,ρ
l-z
和ρ
r-z
的优选取值范围为1.0~1.2;
43.具体实施时,采用如下规则作为停止条件:
44.若|b
z 1-bz|
·
cosθz<α,则认定满足设定的停止条件;式中b
z 1
为第z 1次对中心线进行拟合时计算得到的中心线截距;bz为第z次对中心线进行拟合时计算得到的中心线截距;θz为第z次拟合得到的中心线与x轴的夹角;α为设定的停止阈值参数;z为正整数;其中,
α的值优选为0.03~0.07米。
45.以下结合一个具体实施例,对本发明方法进行进一步说明:
46.图2为采用本发明方法分类识别后的点云数据示意图,图3则为本发明方法的实施例的手动提取的钢轨点云数据示意图。通过如下的一系列对比计算,对本发明方法的有效性进行评价。
47.将每个点的坐标及分类属性(0,1)进行统计,统计结果如表1所示;其中1代表该算法判定为钢轨,0代表该算法判定为非钢轨。
48.表1(0,1)分类结果示意表
49.idxyz真实分类试验分类1-195.999-75.274-1.511
………………………………
336618-195.961-74.455-1.40300
50.表2则为分类结果混淆矩阵的结果示意表:
51.表2分类结果混淆矩阵结果示意表
[0052][0053]
然后计算评价指标:
[0054]
精确率
[0055]
召回率
[0056]
f值
[0057]
其中tp为分类算法处理后钢轨点云中真实钢轨点数量,fp为分类算法处理后错分为钢轨点的非钢轨点数量,fn为分类算法处理后错分为非钢轨点的钢轨点数量。
[0058]
通过上述评价指标可以看到,本发明方法具有非常优秀的准确性和适用性。
[0059]
如图4所示则为钢轨点云到中心线距离的直方分布示意图:通过图4可以看到,钢轨点至计算中线的距离分布在0.7185m即半个轨距附近,相较于前述的现有算法,本发明方法识别的铁路钢轨中心线更为精确。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。