1.本发明涉及考古遗址范围探测技术领域,特别是涉及一种基于无人机的多树区域考古遗址范围探测方法。
背景技术:
[0002][0003]
在考古工作过程中,为了更好的对考古遗址进行保护,往往需要事先对考古遗址的范围进行确定;现有技术中,往往是通过无人机航拍技术来实现考古遗址范围的确定,该方法在平原或者开阔区域的考古工作中十分适用,能够简单快速的确定地面地形状况,进而完成范围确定,但是对于多树区域,简单通过无人机航拍往往无法获取到准确、有效的地面数据信息,进而会影响对地形以及遗址范围的判断,鉴于此,我们提出了一种基于无人机的多树区域考古遗址范围探测方法。
技术实现要素:
[0004]
本发明的目的在于提供一种基于无人机的能够快速、准确、有效获取多树区域下地面地形信息,以便判断考古遗址范围的探测方法,能够更好的保证考古工作的顺利进行,便于根据实际情况对考古工作进行布置和安排。
[0005]
为了实现上述目的,本发明采用了如下技术方案:
[0006]
一种基于无人机的多树区域考古遗址范围探测方法,包括有以下步骤:
[0007]
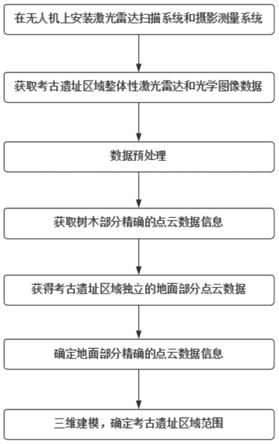
s1、选取多旋翼无人机作为探测设备的安装载体,在多旋翼无人机上安装激光雷达扫描系统和摄影测量系统;
[0008]
s2、利用s1中所提到的激光雷达扫描系统和摄影测量系统对考古遗址区域进行整体性的探测和扫描,获取考古遗址区域的激光雷达和光学图像数据;
[0009]
s3、对s2中所得数据信息进行预处理,获取考古遗址区域整体的点云数据信息;
[0010]
s4、在s3所获取的数据信息的基础上,进一步的对考古遗址区域的树木部分点云数据进行处理和分析;
[0011]
s5、利用s3中所得的考古遗址区域整体性的点云数据信息减去 s4中所得的树木部分精确点云信息,获得考古遗址区域独立的地面部分的点云数据;
[0012]
s6、将s5中所得数据与s3中考古遗址区域整体性点云数据中的地面点云数据信息相结合,进一步的进行处理和分析,确定地面部分的精确点云数据;
[0013]
s7、利用s6中所得数据进行三维建模,构建多树区域考古遗址仿真三维模型,进而确定考古遗址区域的范围。
[0014]
优选地,所述s1中提到的激光雷达扫描系统包括有激光扫描仪、高精度全球导航卫星系统和惯性测试单元以及光学相机;所述摄影测量系统包括有高速数码相机。
[0015]
优选地,所述s2中提到的考古遗址区域激光雷达和光学图像数据的获取,具体包括以下步骤:
[0016]
a1、利用激光扫描仪获取考古遗址区域树木和地面的三维点云数据;利用高精度全球导航卫星系统和惯性测试单元实时获取多旋翼无人机的姿态和位置信息;利用光学相机完成考古遗址区域的树木、特征物类型的识别以及结构信息的提取;
[0017]
a2、利用高速数码相机的自动连拍功能,获取考古遗址区域多角度、多方位的图像数据。
[0018]
优选地,所述s3中提到的数据信息预处理,具体包括以下步骤:
[0019]
b1、对激光扫描仪所得的点云数据信息进行去噪滤波,利用探测离群点的方法去除点云数据中的噪声点;
[0020]
b2、完成b1中所述操作后,对点云数据进行数据分割处理,采用渐进加密三角网滤波算法提取整体点云数据中的地面点和树木点;
[0021]
b3、利用图像提取算法在高速数码相机所得的图像数据上重建、提取树木和地面部分的点云数据,重复b1-b2中所述操作;
[0022]
b4、综合b2与b3中所得数据信息,组成考古遗址区域整体性点云数据库。
[0023]
优选地,所述s4中提到的对树木部分点云数据的进一步处理、分析,具体包括以下步骤:
[0024]
c1、将s3中所得的树木部分的点云数据进行归一化处理;
[0025]
c2、对c1中所得的归一化树木部分点云数据进行单木分割处理,根据单木空间形状特征识别树木平面位置、树冠顶点和树冠边界的点云数据;
[0026]
c3、根据单木冠层点云高度分布特征与地面点云数据之间的关系估测森林的结构参数;
[0027]
c4、综合c2与c3中所得信息,确定考古遗址区域树木部分精确点云数据。
[0028]
优选地,所述s6中提到的地面部分精确点云数据获取,包括以下步骤:
[0029]
d1、先将通过摄影测量系统获得的地面点云数据与通过激光雷达扫描系统所得的点云数据进行对比,保留相吻合的地面点云数据;
[0030]
d2、再将d1中所得点云数据信息与s5中所得数据进行对比,进一步剔除不吻合的点云数据,获得精确的地面部分离散点云数据;
[0031]
d3、通过d2中所得的地面部分离散点云数据内插生成dem格栅。
[0032]
与现有技术相比,本发明提供了一种基于无人机的多树区域考古遗址范围探测方法,具备以下有益效果:
[0033]
本发明提出了一种基于无人机的多树区域考古遗址范围探测方法,在市面上普通激光雷达扫描探测的基础上,结合了高速数码相机的自动连拍基础,可以多角度、多方位、大数量的采集探测区域的图像信息,然后通过图像三维点云重建算法获取探测区域的点云数据信息,将该部分点云数据信息与激光雷达扫描系统所获取的点云数据信息相结合,一方面提高了点云数据信息的丰富性,更进一步的,可以提取到更多有效点云数据,便于后续多树区域下地面点云数据的获取以及地形模型的构建;除此之外,本发明不仅具有更为丰富的探测区域整体性点云数据库,同时还进一步的通过分割算法将树木点云数据和点云数据进行分类,通过整体点云数据减去精确的树木点云数据获取地面点云数据,再结合处理后的地面点云数据,可以获得更为精确的点云数据,在进行多树区域下的地形探测工作时,相较而言,树木部分的点云数据更易获取,也更易进行处理,通过上述方法,能够更好的保
证获取的地面点云数据的准确性,能够为考古遗址区域的范围探测工作提供更加有力的数据支撑。
附图说明
[0034]
图1为本发明提出的一种基于无人机的多树区域考古遗址范围 探测方法的组成结构示意图。
[0035]
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0037]
实施例1:
[0038]
请参阅图1,一种基于无人机的多树区域考古遗址范围探测方法, 包括有以下步骤:
[0039]
s1、选取多旋翼无人机作为探测设备的安装载体,在多旋翼无人机上安装激光雷达扫描系统和摄影测量系统;
[0040]
s1中提到的激光雷达扫描系统包括有激光扫描仪、高精度全球导航卫星系统和惯性测试单元以及光学相机;摄影测量系统包括有高速数码相机;
[0041]
s2、利用s1中所提到的激光雷达扫描系统和摄影测量系统对考古遗址区域进行整体性的探测和扫描,获取考古遗址区域的激光雷达和光学图像数据;
[0042]
s2中提到的考古遗址区域激光雷达和光学图像数据的获取,具体包括以下步骤:
[0043]
a1、利用激光扫描仪获取考古遗址区域树木和地面的三维点云数据;利用高精度全球导航卫星系统和惯性测试单元实时获取多旋翼无人机的姿态和位置信息;利用光学相机完成考古遗址区域的树木、特征物类型的识别以及结构信息的提取;
[0044]
a2、利用高速数码相机的自动连拍功能,获取考古遗址区域多角度、多方位的图像数据;
[0045]
s3、对s2中所得数据信息进行预处理,获取考古遗址区域整体的点云数据信息;
[0046]
s3中提到的数据信息预处理,具体包括以下步骤:
[0047]
b1、对激光扫描仪所得的点云数据信息进行去噪滤波,利用探测离群点的方法去除点云数据中的噪声点;
[0048]
b2、完成b1中操作后,对点云数据进行数据分割处理,采用渐进加密三角网滤波算法提取整体点云数据中的地面点和树木点;
[0049]
b3、利用图像提取算法在高速数码相机所得的图像数据上重建、提取树木和地面部分的点云数据,重复b1-b2中操作;
[0050]
b4、综合b2与b3中所得数据信息,组成考古遗址区域整体性点云数据库
[0051]
s4、在s3所获取的数据信息的基础上,进一步的对考古遗址区域的树木部分点云数据进行处理和分析;
[0052]
s4中提到的对树木部分点云数据的进一步处理、分析,具体包括以下步骤:
[0053]
c1、将s3中所得的树木部分的点云数据进行归一化处理;
[0054]
c2、对c1中所得的归一化树木部分点云数据进行单木分割处理,根据单木空间形状特征识别树木平面位置、树冠顶点和树冠边界的点云数据;
[0055]
c3、根据单木冠层点云高度分布特征与地面点云数据之间的关系估测森林的结构参数;
[0056]
c4、综合c2与c3中所得信息,确定考古遗址区域树木部分精确点云数据;
[0057]
s5、利用s3中所得的考古遗址区域整体性的点云数据信息减去 s4中所得的树木部分精确点云信息,获得考古遗址区域独立的地面部分的点云数据;
[0058]
s6、将s5中所得数据与s3中考古遗址区域整体性点云数据中的地面点云数据信息相结合,进一步的进行处理和分析,确定地面部分的精确点云数据;
[0059]
s6中提到的地面部分精确点云数据获取,包括以下步骤:
[0060]
d1、先将通过摄影测量系统获得的地面点云数据与通过激光雷达扫描系统所得的点云数据进行对比,保留相吻合的地面点云数据;
[0061]
d2、再将d1中所得点云数据信息与s5中所得数据进行对比,进一步剔除不吻合的点云数据,获得精确的地面部分离散点云数据;
[0062]
d3、通过d2中所得的地面部分离散点云数据内插生成dem格栅;
[0063]
s7、利用s6中所得数据进行三维建模,构建多树区域考古遗址仿真三维模型,进而确定考古遗址区域的范围。
[0064]
本发明提出了一种基于无人机的多树区域考古遗址范围探测方法,在市面上普通激光雷达扫描探测的基础上,结合了高速数码相机的自动连拍基础,可以多角度、多方位、大数量的采集探测区域的图像信息,然后通过图像三维点云重建算法获取探测区域的点云数据信息,将该部分点云数据信息与激光雷达扫描系统所获取的点云数据信息相结合,一方面提高了点云数据信息的丰富性,更进一步的,可以提取到更多有效点云数据,便于后续多树区域下地面点云数据的获取以及地形模型的构建;除此之外,本发明不仅具有更为丰富的探测区域整体性点云数据库,同时还进一步的通过分割算法将树木点云数据和点云数据进行分类,通过整体点云数据减去精确的树木点云数据获取地面点云数据,再结合处理后的地面点云数据,可以获得更为精确的点云数据,在进行多树区域下的地形探测工作时,相较而言,树木部分的点云数据更易获取,也更易进行处理,通过上述方法,能够更好的保证获取的地面点云数据的准确性,能够为考古遗址区域的范围探测工作提供更加有力的数据支撑。
[0065]
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。